一种自主无电供电系统、自主无电供电方法及存储介质与流程
本技术涉及无电供电,特别是涉及一种自主无电供电系统、自主无电供电方法及存储介质。
背景技术:
1、由于电动汽车的普及,现在城市化建设中,随着移动充电桩、停车自主充电桩等设施增配和升级,自主供电技术的应用越来越广泛,移动充电桩通常设计为便于携带,并且可以灵活地部署到需要充电的地方,比如停车场、活动现场或者临时工地。为了满足用户需求,移动充电桩通常采用快速充电技术,能够在短时间内给电池充足够的电量,提高充电效率。
2、目前,许多移动充电桩具有智能化功能,能够连接到网络,并通过应用程序进行监控和管理。这种智能化有助于提高充电桩的使用效率,以及提供更好的用户体验。
3、然而,不同的车辆可能需要不同类型的充电接口或充电规格,这可能导致互操作性问题。由于充电桩的安装和配置,需要考虑到充电桩的布局和分布,以满足不同地区和场所的需求,使得充电区域受限,充电投入成本较高。因此,已有从业者提出无电充电方式,在没有外部电源的情况下,利用人工或者移动车载将电源配送到充电桩上,给不同型号的电动汽车供电。但是,无电充电技术通常效率较低,相较于固定的充电桩需要更长时间来充电设备,而且受制于环境内组网的通信限制,导致车载电源配送出现供应异常,稳定性较差,或者人工配送电源,增加劳力成本且灵活性较差,充电效率低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供能够提高供电效率的一种自主无电供电系统、自主无电供电方法及存储介质。
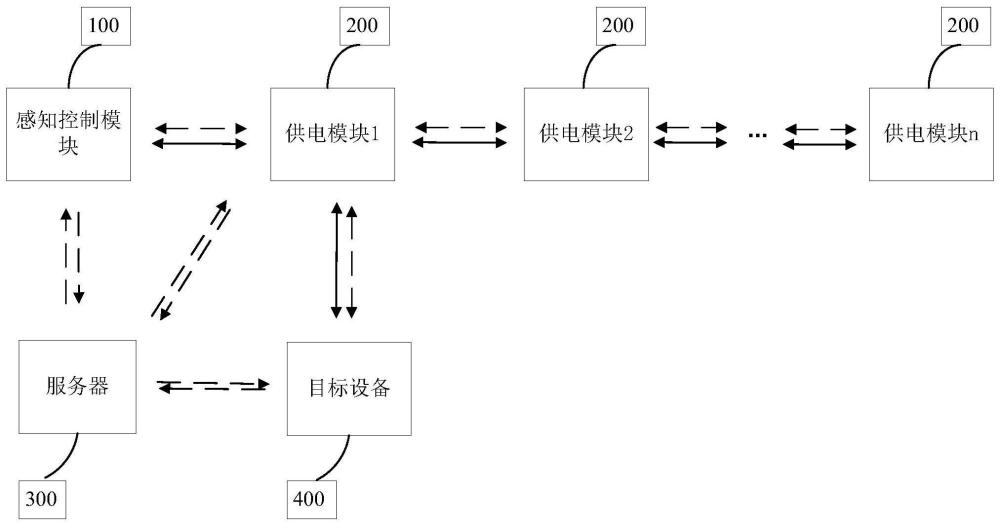
2、一种自主无电供电系统,所述系统包括:感知控制模块与若干个供电模块。
3、感知控制模块响应服务器回传的多个目标设备的充电任务,根据充电任务进行路径规划,生成用于与供电模块合体的第一路径信息以及与供电模块分离的第二路径信息。
4、感知控制模块按照第一路径信息移动并且与供电模块进行通讯连接时,根据预先设置的合体模式与供电模块进行合体。
5、感知控制模块按照第二路径信息移动到目标设备的位置时,根据预先设置的分离模式与供电模块进行分离,以使供电模块与所述目标设备进行交互供电。
6、在其中一个实施例中,感知控制模块包括:集成控制子模块。集成控制子模块,用于响应服务器回传的多个目标设备的充电任务,通过解析充电任务获取每一个目标设备的目标设备信息、目标设备信息匹配的供电模块的供电设备信息,根据供电设备信息进行路径规划,生成第一路径信息。
7、在其中一个实施例中,供电模块包括:信息处理子模块。信息处理子模块采用托马斯通信协议与集成控制子模块建立通信连接后,识别感知控制模块的感知控制设备信息进行标识更新,并上传供电设备信息至集成控制子模块,以使集成控制子模块根据预先设置的合体模式生成合体指令。
8、在其中一个实施例中,感知控制模块还包括:感知移动底盘与接驳模块。感知移动底盘,用于接收集成控制子模块根据第一路径信息生成的第一动作控制指令,根据第一动作控制指令牵引感知控制模块移动至所述供电模块的位置。所述接驳模块,用于接收集成控制子模块生成的合体指令,根据合体指令与供电模块的接驳平台进行组合,以及接收集成控制子模块生成的分离指令,根据分离指令与供电模块的接驳平台进行分离。
9、在其中一个实施例中,供电模块还包括:供电移动底盘、锁止机构以及输出连接器。供电移动底盘,用于接收集成控制子模块根据第二路径信息生成的第二动作控制指令,根据第二动作控制指令牵引感知控制模块移动至目标设备的位置;所述锁止机构,用于接收信息处理子模块生成的锁止指令,根据锁止指令与感知控制模块的接驳模块进行锁止,以及接收集成控制子模块生成的分离指令,根据分离指令与感知控制模块的接驳模块解除锁止。输出连接器,用于供电模块与目标设备进行供电通讯连接。
10、在其中一个实施例中,感知控制模块按照第一路径信息移动至供电模块的位置,采用托马斯通讯协议与供电模块建立通讯连接,根据预先设置的合体模式生成合体指令,以使供电模块与感知控制模块进行合体。
11、在其中一个实施例中,集成控制子模块,还用于根据供电设备信息进行路径规划,生成每一个充电任务对应的子路径信息,若每一个子路径信息一致,则进入托马斯通讯协议模式,生成与每一个子路径信息对应的合体指令,根据子路径信息与合体指令规划第一路径信息与合体指令集。否则,上传异常信息至服务器。
12、在其中一个实施例中,集成控制子模块,还用于在托马斯通讯协议模式下,按照第一路径信息控制感知移动底盘移动至第一路径信息中供电模块的位置后,与信息处理子模块建立通讯连接,下发合体指令集至每一个信息处理子模块,根据预先设置的合体模式与合体指令集控制所述接驳模块与接驳平台进行接驳,以使感知控制模块的移动控制由感知移动底盘切换为供电移动底盘,完成感知控制模块与供电模块的合体操作。
13、在其中一个实施例中,集成控制子模块,还用于在托马斯通信协议模式下,控制已合体的供电模块的供电移动底盘按照第一路径信息移动至下一个子路径信息对应的供电模块的位置后,下发下一个供电模块对应的合体指令至已合体的供电模块的输出连接器,以使已合体的供电模块的输出连接器与下一个供电模块的接驳平台进行首尾接驳,得到队列模块。
14、在其中一个实施例中,队列模块的供电模块,用于在托马斯通信协议模式下,当前供电模块接收队列模块中下一个供电模块的待上传供电设备信息集合,以及将待上传供电设备信息集合与当前供电模块的待上传供电设备信息发送至队列模块中上一个供电模块,以使感知控制模块获取队列模块中供电模块的供电设备信息的集合,生成动作控制指令集。
15、在其中一个实施例中,队列模块的感知控制模块,用于在托马斯通信协议模式下,通过多模计算获取感知子模块的感知信息、目标设备的位置信息以及队列模块的位置信息进行路径规划,生成第二路径信息与动作控制指令集,根据第二路径信息与动作控制指令集控制队列模块的供电移动底盘移动至充电任务对应的目标设备的位置。
16、在其中一个实施例中,在队列模块的感知控制模块按照第二路径信息控制队列模块的供电移动底盘移动至充电任务对应的目标设备的位置时,队列模块的感知控制模块进入预先设置的分离模式,生成脱离指令,根据脱离指令控制感知控制模块与感知控制模块直接接驳的供电模块从队列模块中分离,以使感知控制模块直接接驳的供电模块与目标设备进行供电连接。
17、在其中一个实施例中,目标设备包括:待充电设备。在感知控制模块直接接驳的供电模块与所述待充电设备进行供电连接后,供电模块上传供电控制切换指令至感知控制模块,以使感知控制模块生成分离指令,根据分离指令控制接驳模块与接驳平台进行分离,完成感知控制模块与供电模块的分离操作。
18、在其中一个实施例中,供电模块给待充电设备完成供电后,上传蓄电需求至服务器,以使感知控制模块响应服务器下发的蓄电任务,生成用于与供电模块合体后的第三路径信息。
19、在其中一个实施例中,目标设备还包括:蓄电设备。感知控制模块与所述供电模块合体后,按照第三路径信息移动至蓄电设备的位置时,根据预先设置的分离模块与供电模块进行分离,以使蓄电设备给供电模块进行供电连接。
20、在其中一个实施例中,接驳模块,用于被感知移动底盘驱动至供电模块的位置时,接收集成控制子模块生成的接驳控制指令,根据接驳控制指令升起至与接驳平台的高度一致的位置,以使接驳平台嵌入接驳模块与感知移动底盘之间的接驳空间,完成接驳模块与接驳平台的合体。
21、一种自主无电供电方法,所述方法包括:
22、根据服务器回传的多个目标设备的充电任务进行路径规划,分别生成第一路径信息与第二路径信息。
23、根据第一路径信息建立感知控制模块与供电模块的通信连接,以使感知控制模块与供电模块进行合体。
24、根据第二路径信息将已合体的感知控制模块与供电模块移动至目标的位置进行分离,以使供电模块与目标设备进行交互供电。
25、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
26、根据服务器回传的多个目标设备的充电任务进行路径规划,分别生成第一路径信息与第二路径信息。
27、根据第一路径信息建立感知控制模块与供电模块的通信连接,以使感知控制模块与所述供电模块进行合体。
28、根据第二路径信息将已合体的感知控制模块与供电模块移动至目标的位置进行分离,以使供电模块与目标设备进行交互供电。
29、上述一种自主无电供电系统、自主无电供电方法及存储介质,该系统通过感知控制模块响应服务器回传的多个目标设备的充电任务,解决了目标设备的充电需求管理问题。感知控制模块根据充电任务进行路径规划,这解决了在供电模块与目标设备之间移动时需要遵循的路径选择问题。感知控制模块在与供电模块进行通讯连接的同时移动,解决了供电模块与感知控制模块之间需要实现协同操作的问题。由感知控制模块作为合体后组成的队列的控制中枢,对整体队列的移动、通讯、感知、分离等进行总控,实现了无电源供电,通过感知控制模块与供电模块的协同操作,目标设备得以自主完成充电过程,提高了系统的自主性和灵活性。加之,通过感知控制模块的路径规划,系统可以优化供电模块与目标设备之间的移动路径,提高了整体效率,减少了能源浪费。通过感知控制模块的充电任务管理和路径规划,系统可以更有效地为多个目标设备依次有序供电,提高了执行并发充电任务的充电效率,减少了充电时间。
- 还没有人留言评论。精彩留言会获得点赞!