计及节能驾驶的燃料电池重卡能量管理方法及系统
本发明属于燃料电池汽车动力系统控制,尤其涉及一种计及节能驾驶的燃料电池重型卡车能量管理方法及系统。
背景技术:
1、当前,燃料电池汽车具有高效率、零排放的优势。受制于氢气运输,加氢站的制约,燃料电池乘用车的发展受到限制,燃料电池重型卡车因其线路固定,且相比于纯电动重卡具有燃料加注时间短,续航里程长等优点成为燃料电池汽车发展新的突破口。燃料电池重型卡车通常采用混合驱动模式,“燃料电池+动力电池”是其典型的动力系统结构,能量管理根据不同功率源的特性来协调其功率输出,来保证车辆的动力性能。企业自主研发的氢燃料物流重型卡车,其续航可达1000km以上,整车百公里氢耗在满载49吨高速行驶的工况下低至8kg。然而,高昂的运行和维护成本严重制约着氢燃料电池重型卡车的商业化进程。降低整车运维成本是加速氢燃料电池重型卡车商业化进程亟需解决的问题。
2、先进的能量管理策略可以在保障车辆动力性能的同时,降低系统能耗并且提高关键部件寿命。跟车行驶是燃料电池重型卡车常见的行驶工况,实现其在跟车行驶工况下的节能驾驶和能量管理。现有的卡车跟车节能驾驶中,如专利号为cn116161031a,一种节约燃油的自动驾驶卡车跟随控制方法及装置,该专利构建了燃油经济性等级与跟车距离的对应关系,通过调节车速控制跟车距离来实现燃油经济性。但该方法不具备跟车下最优的燃油经济性且未考虑前车速度变化对节能的影响。现有的能量管理技术中,如专利号为cn116101130b,一种燃料电池汽车能量管理的方法及系统,从全局优化的角度实现功率分配与最小能耗。但该方法不具备实时性,且目标函数没有考虑动力源老化带来的成本。专利号为cn116278993a,一种考虑多目标优化的燃料电池汽车能量管理控制方法,将动力电池寿命成本和燃料电池寿命成本折算成等效氢耗,来实现能量管理的多目标优化,但不同目标的重要程度不同,采取同样的权重影响了方案的优化性能。
3、通过上述分析,现有技术存在的问题及缺陷为:现有的卡车跟车行驶难以保证最优的节能效果且忽略了前车速度变化的影响。现有的能量管理技术多以能量能耗最小为目标,未考虑动力源老化导致的成本。考虑动力源老化的能量管理技术仍待继续优化。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种计及节能驾驶的燃料电池重型卡车的能量管理方法及系统。
2、本发明是这样实现的,计及节能驾驶的燃料电池重型卡车能量管理策略。首先采用“模糊c均值+马尔可夫链”对前车的速度进行速度预测,然后构建燃料电池重型卡车的节能驾驶模型,基于前车的预测速度最小化车辆消耗功率,同时保证安全的跟车距离并提高驾驶舒适性,利用序列二次规划(sqp)求解节能驾驶问题,规划车辆最优行驶轨迹,最后构建基于模型预测控制的能量管理策略,选择燃料电池输出功率变化率为系统的控制变量,电池荷电状态和燃料电池输出功率为状态变量。建立包含氢气消耗,燃料电池老化成本,动力电池老化成本的燃料电池重型卡车全生命周期运维成本代价函数。下层能量管理策略基于上层车辆规划轨迹执行功率分配,进一步优化能量管理效果。上述过程在每一个采样间隔内执行完毕,不断重复直到车辆停止运行。
3、进一步,所述计及节能驾驶的燃料电池重型卡车能量管理方法具体包括以下步骤:
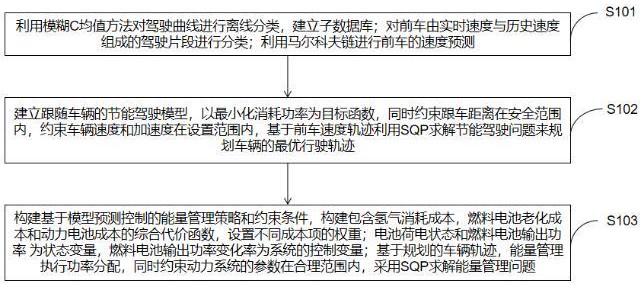
4、步骤一:利用模糊c均值方法对驾驶曲线进行离线分类,建立子数据库。对前车由实时速度与历史速度组成的驾驶片段进行分类。后利用马尔可夫链 (mc)进行前车的速度预测。
5、步骤二:建立跟随车辆的节能驾驶模型,以最小化消耗功率为目标函数。同时约束跟车距离在安全范围内,也避免过大的跟车距离而恶化交通效率。约束车辆速度和加速度在设置范围内。基于前车速度轨迹利用sqp求解节能驾驶问题来规划车辆的最优行驶轨迹。
6、步骤三:构建基于模型预测控制的能量管理策略和约束条件。构建包含氢气消耗成本,燃料电池老化成本和动力电池成本的综合代价函数,设置不同成本项的权重。电池荷电状态和燃料电池输出功率为状态变量,燃料电池输出功率变化率为系统的控制变量。基于规划的车辆轨迹,能量管理执行功率分配,同时约束动力系统的参数在合理范围内。采用sqp来求解能量管理问题。
7、进一步,所述步骤一,具体包括:
8、(1a)模糊c均值对驾驶数据进行分类处理;
9、驾驶数据包含速度和加速度信息,将驾驶数据分成长度为的片段,前车速度:,前车加速度:;其中分别表示时刻与时刻的速度,分别表示时刻与时刻的加速度。对驾驶数据进行特征化处理,选择片段平均速度,片段加速度平均值的绝对值以及加速度绝对值的标准差作为特征变量。由于不同特征变量在数值大小的差异,对上述特征变量进行标幺化处理,特征变量选定为,是的标幺化结果,是的标幺化结果,是的标幺化结果;,,,其中是的最大值,是的最大值,是的最大值;
10、(1b) 模糊c均值将驾驶片段基于驾驶习惯分为3类,激进的、中等的和温和的。最终将产生3个对应于3种驾驶习惯的聚类中心:;第z个驾驶片段对于聚类中心有对应的隶属度;最大隶属度对应的聚类中心作为驾驶片段的分类结果。驾驶片段对应的加速度转移数据为,是驾驶片段长度,是模型预测控制的预测域长度,表示时刻的加速度。
11、(1c)根据加速度转移数据库构建多步转移概率矩阵,,为第一步的转移概率矩阵,为第步的转移概率矩阵。转移矩阵中,行列的转移概率可以用通过式(1)得到。表示速度所有的转移数,表示从速度到加速度的转移数。表示第步的转移概率矩阵。表示速度的马尔可夫状态数量,表示加速度的马尔可夫状态数量。表示时刻的车辆速度,表示时刻的加速度。
12、 (1);
13、(1d)在线行驶中,基于历史速度和当前速度计算其对于聚类中心的隶属度。第步对应于第个聚类中心的预测加速度可以通过式(2)计算得到,表示第步的转移概率矩阵中对应于第个聚类中心的转移概率矩阵。
14、 (2);
15、预测速度可通过式(3)得到。表示采样时间间隔,表示第步对应于第个聚类中心的预测速度,表示第步对应于第个聚类中心的预测加速度。
16、 (3);
17、最终的前车的第步的预测速度可通过式(4)得到,表示对应于第个聚类中心的隶属度。
18、 (4);
19、进一步,所述步骤二,具体包括:
20、建立跟车下后车的节能驾驶问题:
21、(5);
22、(6);
23、表示时刻车辆加速度,表示时刻车辆速度,表示时刻车辆速度,代表时刻前车速度,表示时刻车辆所需的驱动功率,表示时刻车辆与前车的相对距离,表示时刻车辆与前车的相对距离。为避免两车距离过近发生碰撞,设置最小跟车距离,同时防止跟车距离过大恶化交通效率设置最大跟车距离。根据实际情况设置车辆速度上限,车辆最小速度为0。同时设置加速度上限和下限。代表车辆质量,代表重力加速度,为滚动摩擦因素,是道路坡度,为空气密度,表示迎风面积,表示空气阻力系数。
24、上述节能驾驶问题是一个非线性问题,采用sqp来求解上述问题。在每个采样时刻内求解预测域内的节能驾驶问题,得到最优的车辆行驶轨迹。
25、进一步,所述步骤三,具体包括:
26、(3a)建立燃料电池老化成本:
27、燃料电池系统的启停,负载变化,低负载和高负载工况会导致其老化。频繁的启停是导致燃料电池系统老化的最主要因素。和分别表示燃料电池输出功率和最大输出功率,表示燃料电池处于高负载工况下,表示燃料电池处于低负载工况下,为燃料电池输出功率变化率。燃料电池老化成本由启停成本、负载变化成本、低负载成本和高负载成本构成得到。
28、(7);
29、(8);
30、(9);
31、(10);
32、预测时域内燃料电池老化成本:(11);
33、其中分别表示预测时域内燃料电池启停和变载的次数;和分别是一段预测时域内燃料电池处于低载和高载工况的时间;、、和分别是燃料电池处于启停、变载、低载、高载工况下的老化系数,为燃料电池系统价格,通常燃料电池电压降到额定电压的10%即认为寿命终止;
34、(3b)建立动力电池老化成本:
35、预测时域内动力电池的老化成本:
36、(12);
37、(13);
38、其中,是电池价格;表示时刻的电池健康状态;表示为预测时域内动力电池的老化成本;表示时刻的电池健康状态;是时刻的电池电流;指在大小为c的放电速率下电池的生命循环周期数;是电池容量;为采样时间间隔,是模型预测控制的预测域长度;
39、(3c)建立氢耗成本:
40、预测时域内燃料电池的氢耗成本:
41、(14);
42、其中,是氢气每千克价格,是氢气消耗质量;是燃料电池单体数目,表示时刻燃料电池电流,表示氢气摩尔质量,为氢气每千摩尔的自由电子数目,表示法拉第常数。全生命周期运维成本即为燃料电池老化成本、动力电池老化成本和氢耗成本相加。
43、(3d)构建能量管理问题;
44、控制变量为燃料电池输出功率变化率,状态变量为电池荷电状态和燃料电池输出功率。时刻的多目标成本函数为:(15)。
45、约束条件为:
46、(16);
47、燃料电池输出功率限制在最小值和最大值之间,即0kw-200kw;将燃料电池输出功率变化量限制在最小值和最大值之间,即-2kw-2kw;研究车辆为非插电式车辆,需将电池soc限制在最小值和最大值之间,即0.6-0.8;电池荷电状态初始值为0.7;电池健康状态初始值为1;分别是时刻的燃料电池输出功率、燃料电池功率变化、电池soc值。针对能量管理问题的非线性,采用sqp解决上述能量管理问题。
48、本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述计及节能驾驶的燃料电池重型卡车能量管理方法。
49、本发明的另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行所述计及节能驾驶的燃料电池重型卡车能量管理方法。
50、本发明的另一目的在于提供一种信息数据处理终端,所述信息数据处理终端用于实现计及节能驾驶的燃料电池重型卡车能量管理方法。
51、本发明的另一目的在于提供一种计及节能驾驶的燃料电池重型卡车能量管理方法的计及节能驾驶的燃料电池重型卡车能量管理系统,所述计及节能驾驶的燃料电池重型卡车能量管理系统包括:
52、对于前车的速度预测模块,利用先进的通信技术获得前车的速度信息,基于前车的实时速度和历史速度对前车的未来速度进行预测。
53、节能驾驶模块,用于实现跟车工况下的节能驾驶,以最小化驱动功率为目标,同时保证跟车下的安全性能,规划出车辆的最优行驶轨迹。
54、能量管理模块,基于节能驾驶模块的行驶轨迹规划结果,能量管理执行功率分配,保证车辆动力性能。能量管理以燃料电池输出功率变化率为系统的控制变量,电池荷电状态和燃料电池输出功率为状态变量,可以实现多目标的控制,最小化包括氢气成本、燃料电池老化成本,动力电池老化成本以及约束荷电状态在设置范围内。
55、本发明的另一目的在于提供一种燃料电池重型卡车动力系统,燃料电池后端接dc/dc变换器接入母线回路,锂电池则直接接入母线。功率通过母线经双向dc/ac变换器向电机提供功率,经传动系统后驱动车辆运行。
56、结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
57、第一,针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果。具体描述如下:
58、本发明提出的基于计及节能驾驶的燃料电池重型卡车能量管理方法可以实现燃料电池重型卡车在跟车工况下的节能驾驶与安全行驶,规划出最优行驶轨迹,进一步优化能量管理策略性能。能量管理不仅仅实现氢气消耗的降低,而且可以延长动力源寿命,实现动力源全生命周期运维成本的降低。模型预测控制对处理多目标多约束问题具有优势,使用序列二次规划求解非线性能量管理问题,算法执行效率高,可以实时应用。
59、第二,把技术方案看作一个整体或者从产品的角度,本发明所要保护的技术方案具备的技术效果和优点,具体描述如下:
60、本发明为弥补现有跟车节能驾驶和能量管理技术在降低车辆全生命周期运维成本方面的不足之处,提出一种计及节能驾驶的燃料电池重型卡车能量管理策略。以最小化消耗功率为目标,实现节能驾驶的最优化以及跟车工况的安全性。建立了包括氢气成本和动力源老化成本的综合成本代价函数,可延长动力源寿命,提高车辆的经济性。
61、第三,作为本发明的创造性辅助证据,还体现在以下几个方面:
62、纯电动重型卡车因其续航里程短,充电时间长在商业运输领域的发展受到限制。氢燃料电池重型卡车以氢气为能量来源,排放物是清洁的水,且效率高可在低温条件下正常启动运行,且其运输线路固定,对加氢站的建设要求不高,在商业化运输领域具有巨大的潜力。但高昂的运行和维护成本制约着氢燃料电池重型卡车大规模商业化应用。作为氢燃料电池重型卡车十分常见的工况,实现跟车工况下的节能驾驶和能量管理技术是降低车辆运行成本。
- 还没有人留言评论。精彩留言会获得点赞!