一种车辆制动方法、装置、系统、电子设备及可读介质与流程
本发明涉及车辆,特别是涉及一种车辆制动方法、一种车辆制动装置、一种车辆制动系统、一种电子设备以及一种计算机可读介质。
背景技术:
1、现有技术下,为缓解车辆在制动过程中的点头现象以实现无感停车,通常采取的方法是减小制动过程中的制动力,从而使车辆悬架应力提前释放。然而,在制动力减弱的过程中,用户仍能察觉到车辆减速度的减小,从而无法真正实现无感停车。
技术实现思路
1、本发明实施例提供一种车辆制动方法、装置、系统、电子设备以及计算机可读存储介质,以解决采用减小制动力以缓解车辆点头现象,从而实现无感停车的策略在制动力减弱的过程中,用户仍能察觉到车辆减速度的减小,无法真正实现无感停车的问题。
2、本发明实施例公开了一种车辆制动方法,包括:
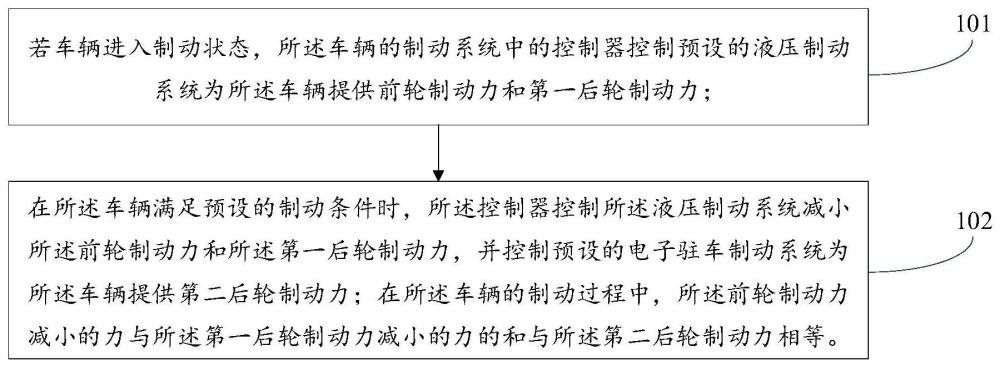
3、若车辆进入制动状态,所述车辆的制动系统中的控制器控制预设的液压制动系统为所述车辆提供前轮制动力和第一后轮制动力;
4、在所述车辆满足预设的制动条件时,所述控制器控制所述液压制动系统减小所述前轮制动力和所述第一后轮制动力,并控制预设的电子驻车制动系统为所述车辆提供第二后轮制动力;在所述车辆的制动过程中,所述前轮制动力减小的力与所述第一后轮制动力减小的力的和与所述第二后轮制动力相等。
5、可选地,所述车辆还包括前悬架;在所述液压制动系统减小所述前轮制动力的过程中,所述前悬架的受力减小。
6、可选地,所述液压制动系统包括制动踏板、制动液和制动器;所述控制预设的液压制动系统为所述车辆提供前轮制动力和第一后轮制动力的步骤包括:
7、响应于用户针对所述制动踏板的踩踏操作,所述控制器控制所述液压制动系统向所述制动液提供预设的压力;
8、所述控制器通过所述液压制动系统控制具有所述压力的所述制动液进入所述制动器,以使得所述制动器为所述车辆提供所述前轮制动力和所述第一后轮制动力。
9、可选地,所述方法还包括:
10、所述控制器基于所述压力与所述车辆的前轴制动效能参数确定所述前轮制动力;
11、所述控制器基于所述压力与所述车辆的后轴制动效能参数确定所述第一后轮制动力。
12、可选地,所述控制所述液压制动系统减小所述前轮制动力和所述第一后轮制动力的步骤之后还包括:
13、所述控制器计算所述前轮制动力在所述前轮制动力减小过程中的第一减小值,并计算所述第一后轮制动力在所述第一后轮制动力减小过程中的第二减小值;
14、所述控制器计算所述第一减小值与所述第二减小值的和,并将所述第一减小值与所述第二减小值的和作为待提供的所述第二后轮制动力。
15、可选地,所述控制预设的电子驻车制动系统为所述车辆提供第二后轮制动力的步骤包括:
16、所述控制器控制所述电子驻车制动系统为所述车辆提供所述待提供的所述第二后轮制动力。
17、可选地,所述液压制动系统还包括防抱死制动系统;所述预设的制动条件至少包括所述车辆的速度低于预设速度、所述防抱死制动系统未激活、所述电子驻车制动系统功能正常、所述车辆的减速度低于预设减速度、所述车辆的侧向加速度低于预设侧向加速度、所述车辆的车身横摆角速度低于预设车身横摆角速度以及所述车辆在所述前轮制动力和所述第一后轮制动力提供过程中的减速度变化率低于预设减速度变化率中的一种。
18、本发明实施例还公开了一种车辆制动装置,包括:
19、制动力提供模块,用于若车辆进入制动状态,所述车辆的制动系统中的控制器控制预设的液压制动系统为所述车辆提供前轮制动力和第一后轮制动力;
20、制动力减小模块,用于在所述车辆满足预设的制动条件时,所述控制器控制所述液压制动系统减小所述前轮制动力和所述第一后轮制动力,并控制预设的电子驻车制动系统为所述车辆提供第二后轮制动力;在所述车辆的制动过程中,所述前轮制动力减小的力与所述第一后轮制动力减小的力的和与所述第二后轮制动力相等。
21、可选地,所述车辆还包括前悬架;在所述液压制动系统减小所述前轮制动力的过程中,所述前悬架的受力减小。
22、可选地,所述液压制动系统包括制动踏板、制动液和制动器;所述制动力提供模块包括:
23、压力提供子模块,用于响应于用户针对所述制动踏板的踩踏操作,所述控制器控制所述液压制动系统向所述制动液提供预设的压力;
24、制动液控制子模块,用于使所述控制器通过所述液压制动系统控制具有所述压力的所述制动液进入所述制动器,以使得所述制动器为所述车辆提供所述前轮制动力和所述第一后轮制动力。
25、可选地,所述装置还包括:
26、前轮制动力确定模块,用于使所述控制器基于所述压力与所述车辆的前轴制动效能参数确定所述前轮制动力;
27、第一后轮制动力确定模块,用于使所述控制器基于所述压力与所述车辆的后轴制动效能参数确定所述第一后轮制动力。
28、可选地,所述装置还包括:
29、第一计算模块,用于使所述控制器计算所述前轮制动力在所述前轮制动力减小过程中的第一减小值,并计算所述第一后轮制动力在所述第一后轮制动力减小过程中的第二减小值;
30、第二计算模块,用于使所述控制器计算所述第一减小值与所述第二减小值的和,并将所述第一减小值与所述第二减小值的和作为待提供的所述第二后轮制动力。
31、可选地,所述制动力减小模块包括:
32、第二后轮制动力提供子模块,用于使所述控制器控制所述电子驻车制动系统为所述车辆提供所述待提供的所述第二后轮制动力。
33、可选地,所述液压制动系统还包括防抱死制动系统;所述预设的制动条件至少包括所述车辆的速度低于预设速度、所述防抱死制动系统未激活、所述电子驻车制动系统功能正常、所述车辆的减速度低于预设减速度、所述车辆的侧向加速度低于预设侧向加速度、所述车辆的车身横摆角速度低于预设车身横摆角速度以及所述车辆在所述前轮制动力和所述第一后轮制动力提供过程中的减速度变化率低于预设减速度变化率中的一种。
34、本发明实施例还公开了一种车辆制动系统,至少包括控制器、电子驻车制动系统以及液压制动系统,所述控制器分别与所述电子驻车制动系统和所述液压制动系统通信连接;
35、所述控制器用于若车辆进入制动状态,控制所述液压制动系统为所述车辆提供前轮制动力和第一后轮制动力;
36、所述控制器用于在所述车辆满足预设的制动条件时,控制所述液压制动系统减小所述前轮制动力和所述第一后轮制动力,并控制所述电子驻车制动系统为所述车辆提供第二后轮制动力;在所述车辆的制动过程中,所述前轮制动力减小的力与所述第一后轮制动力减小的力的和与所述第二后轮制动力相等。
37、可选地,所述车辆还包括前悬架;在所述液压制动系统减小所述前轮制动力的过程中,所述前悬架的受力减小。
38、可选地,所述液压制动系统包括制动踏板、制动液和制动器;
39、所述控制器用于响应于用户针对所述制动踏板的踩踏操作,控制所述液压制动系统向所述制动液提供预设的压力;
40、所述控制器用于通过所述液压制动系统控制具有所述压力的所述制动液进入所述制动器,以使得所述制动器为所述车辆提供所述前轮制动力和所述第一后轮制动力。
41、可选地,所述控制器用于基于所述压力与所述车辆的前轴制动效能参数确定所述前轮制动力;
42、所述控制器用于基于所述压力与所述车辆的后轴制动效能参数确定所述第一后轮制动力。
43、可选地,所述控制器用于计算所述前轮制动力在所述前轮制动力减小过程中的第一减小值,并计算所述第一后轮制动力在所述第一后轮制动力减小过程中的第二减小值;
44、所述控制器用于计算所述第一减小值与所述第二减小值的和,并将所述第一减小值与所述第二减小值的和作为待提供的所述第二后轮制动力。
45、可选地,所述控制器用于控制所述电子驻车制动系统为所述车辆提供所述待提供的所述第二后轮制动力。
46、可选地,所述液压制动系统还包括防抱死制动系统;所述预设的制动条件至少包括所述车辆的速度低于预设速度、所述防抱死制动系统未激活、所述电子驻车制动系统功能正常、所述车辆的减速度低于预设减速度、所述车辆的侧向加速度低于预设侧向加速度、所述车辆的车身横摆角速度低于预设车身横摆角速度以及所述车辆在所述前轮制动力和所述第一后轮制动力提供过程中的减速度变化率低于预设减速度变化率中的一种。
47、本发明实施例还公开了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,所述处理器、所述通信接口以及所述存储器通过所述通信总线完成相互间的通信;
48、所述存储器,用于存放计算机程序;
49、所述处理器,用于执行存储器上所存放的程序时,实现如本发明实施例所述的方法。
50、本发明实施例还公开了一个或多个计算机可读介质,其上存储有指令,当由一个或多个处理器执行时,使得所述处理器执行如本发明实施例所述的方法。
51、本发明实施例包括以下优点:
52、在本发明实施例中,若车辆进入制动状态,车辆的制动系统中的控制器控制预设的液压制动系统为车辆提供前轮制动力和第一后轮制动力;在车辆满足预设的制动条件时,控制器控制液压制动系统减小前轮制动力和第一后轮制动力,实现了车辆前轮制动力的减小,缓解了车辆制动过程中的重心前移,使得车辆前悬架的弹簧的势能提前释放,缓解了车辆在制动过程中的点头现象。在前轮制动力和第一后轮制动力减小的同时,控制器控制预设的电子驻车制动系统为车辆提供第二后轮制动力,且在车辆的制动过程中,前轮制动力减小的力与第一后轮制动力减小的力的和与第二后轮制动力相等,车辆的制动力不变,避免了车辆制动力的减小造成的车辆的减速度的减小,实现了无感停车。
- 还没有人留言评论。精彩留言会获得点赞!