附着系数的确定方法、装置、车辆、介质及程序产品与流程
本技术涉及车辆,尤其涉及附着系数的确定方法、装置、车辆、介质及程序产品。
背景技术:
1、车辆的附着系数,对于车辆实施纵向驱动防滑控制,起到了关键的作用。
2、相关技术中,通常是车辆直接根据纵向驱动力和垂直载荷的比值,估算附着系数,以基于该附着系数,对车辆实施防滑控制。
3、但是,相关技术中的方法,直接根据纵向驱动力和垂直载荷的比值,估算附着系数的方法,存在附着系数,与车辆的实际情况不匹配的情况,进而导致车辆的防滑控制不准确,影响乘车人员的安全。
技术实现思路
1、本技术实施例提供附着系数的确定方法、装置、车辆、介质及程序产品,能够提高确定车辆的附着系数的准确率。
2、第一方面,本技术实施例提供一种附着系数的确定方法,包括:
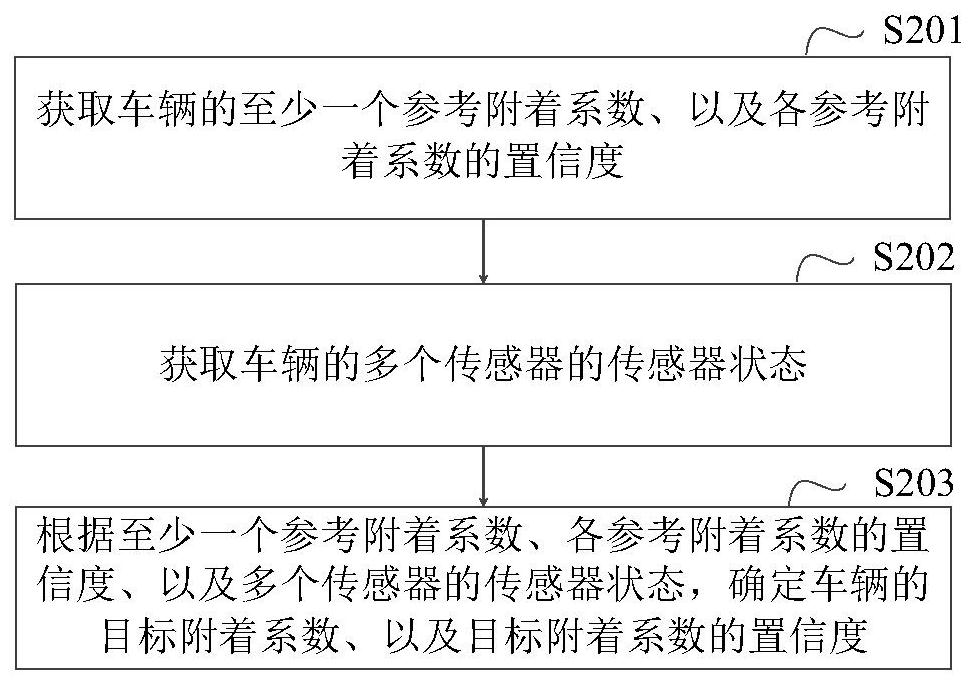
3、获取车辆的至少一个参考附着系数、以及各参考附着系数的置信度,至少一个参考附着系数包括如下至少一种:稳态附着系数、动态附着系数、纵向附着系数或横向附着系数;
4、获取车辆的多个传感器的传感器状态,传感器状态为正常状态或者失效状态;
5、根据至少一个参考附着系数、各参考附着系数的置信度、以及多个传感器的传感器状态,确定车辆的目标附着系数、以及目标附着系数的置信度。
6、在一种实现方式中,根据至少一个参考附着系数、各参考附着系数的置信度、以及多个传感器的传感器状态,确定车辆的目标附着系数、以及目标附着系数的置信度,包括:
7、根据多个传感器的传感器状态,判断是否存在至少一个传感器的传感器状态为失效状态;
8、若是,则确定目标附着系数为第一预设值,以及确定目标附着系数的置信度为第二预设值;
9、若否,则根据至少一个参考附着系数、各参考附着系数的置信度,确定车辆的目标附着系数、以及目标附着系数的置信度。
10、在一种实现方式中,至少一个参考附着系数包括动态附着系数、纵向附着系数和横向附着系数;根据至少一个参考附着系数、各参考附着系数的置信度,确定车辆的目标附着系数、以及目标附着系数的置信度,包括:
11、若动态附着系数、纵向附着系数和横向附着系数的置信度皆小于或者等于0,则确定目标附着系数为第三预设值,以及确定目标附着系数的置信度为第四预设值。
12、在一种实现方式中,至少一个参考附着系数包括动态附着系数、纵向附着系数和横向附着系数;根据至少一个参考附着系数、各参考附着系数的置信度,确定车辆的目标附着系数、以及目标附着系数的置信度,包括:
13、确定参考附着系数大于第一预设阈值,且对应的置信度大于第二预设阈值的参考附着系数的目标数量;
14、根据目标数量,对动态附着系数、纵向附着系数和横向附着系数进行融合处理,得到目标附着系数、以及目标附着系数的置信度。
15、在一种实现方式中,目标数量大于1;根据目标数量,对动态附着系数、纵向附着系数和横向附着系数进行融合处理,得到目标附着系数、以及目标附着系数的置信度,包括:
16、获取动态附着系数、纵向附着系数和横向附着系数的附着系数之和;
17、将附着系数之和与目标数量的比值,确定为目标附着系数;
18、确定目标附着系数的置信度为第五预设值。
19、在一种实现方式中,目标数量为1;根据目标数量,对动态附着系数、纵向附着系数和横向附着系数进行融合处理,得到目标附着系数、以及目标附着系数的置信度,包括:
20、根据动态附着系数的置信度、纵向附着系数的置信度、以及横向附着系数的置信度,对动态附着系数、纵向附着系数、横向附着系数进行加权融合处理,得到加权附着系数;
21、获取动态附着系数的置信度、纵向附着系数的置信度、以及横向附着系数的置信度之和;
22、将加权附着系数和置信度之和的比值,确定为目标附着系数;
23、将动态附着系数的置信度、纵向附着系数的置信度、以及横向附着系数的置信度的均方值,确定为目标附着系数的置信度。
24、在一种实现方式中,至少一个参考附着系数包括稳态附着系数;根据至少一个参考附着系数、各参考附着系数的置信度,确定车辆的目标附着系数、以及目标附着系数的置信度,包括:
25、若稳态附着系数的置信度大于或等于1,则确定车辆的稳定性控制系统的激活时长;
26、获取车辆在上一时刻的历史目标附着系数;
27、根据稳态附着系数、激活时长和历史目标附着系数,确定目标附着系数、以及目标附着系数的置信度。
28、在一种实现方式中,根据稳态附着系数、激活时长和历史目标附着系数,确定目标附着系数、以及目标附着系数的置信度,包括:
29、获取稳态附着系数与历史目标附着系数的系数差值;
30、根据激活时长确定调整系数,并将调整系数和系数差值的乘积确定为系数调整量;
31、将历史目标附着系数与系数调整量之和,确定为目标附着系数;
32、将目标附着系数的置信度确定为第六预设值。
33、第二方面,本技术实施例提供一种附着系数的确定装置,包括:
34、获取模块,用于获取车辆的至少一个参考附着系数、以及各参考附着系数的置信度,至少一个参考附着系数包括如下至少一种:稳态附着系数、动态附着系数、纵向附着系数或横向附着系数;
35、获取模块,还用于获取车辆的多个传感器的传感器状态,传感器状态为正常状态或者失效状态;
36、处理模块,还用于根据至少一个参考附着系数、各参考附着系数的置信度、以及多个传感器的传感器状态,确定车辆的目标附着系数、以及目标附着系数的置信度。
37、在一种实现方式中,处理模块,具体用于:
38、根据多个传感器的传感器状态,判断是否存在至少一个传感器的传感器状态为失效状态;
39、若是,则确定目标附着系数为第一预设值,以及确定目标附着系数的置信度为第二预设值;
40、若否,则根据至少一个参考附着系数、各参考附着系数的置信度,确定车辆的目标附着系数、以及目标附着系数的置信度。
41、在一种实现方式中,至少一个参考附着系数包括动态附着系数、纵向附着系数和横向附着系数;处理模块,具体用于:
42、若动态附着系数、纵向附着系数和横向附着系数的置信度皆小于或者等于0,则确定目标附着系数为第三预设值,以及确定目标附着系数的置信度为第四预设值。
43、在一种实现方式中,至少一个参考附着系数包括动态附着系数、纵向附着系数和横向附着系数;处理模块,具体用于:
44、确定参考附着系数大于第一预设阈值,且对应的置信度大于第二预设阈值的参考附着系数的目标数量;
45、根据目标数量,对动态附着系数、纵向附着系数和横向附着系数进行融合处理,得到目标附着系数、以及目标附着系数的置信度。
46、在一种实现方式中,目标数量大于1;处理模块,具体用于:
47、获取动态附着系数、纵向附着系数和横向附着系数的附着系数之和;
48、将附着系数之和与目标数量的比值,确定为目标附着系数;
49、确定目标附着系数的置信度为第五预设值。
50、在一种实现方式中,目标数量为1;处理模块,具体用于:
51、根据动态附着系数的置信度、纵向附着系数的置信度、以及横向附着系数的置信度,对动态附着系数、纵向附着系数、横向附着系数进行加权融合处理,得到加权附着系数;
52、获取动态附着系数的置信度、纵向附着系数的置信度、以及横向附着系数的置信度之和;
53、将加权附着系数和置信度之和的比值,确定为目标附着系数;
54、将动态附着系数的置信度、纵向附着系数的置信度、以及横向附着系数的置信度的均方值,确定为目标附着系数的置信度。
55、在一种实现方式中,至少一个参考附着系数包括稳态附着系数;处理模块,具体用于:
56、若稳态附着系数的置信度大于或等于1,则确定车辆的稳定性控制系统的激活时长;
57、获取车辆在上一时刻的历史目标附着系数;
58、根据稳态附着系数、激活时长和历史目标附着系数,确定目标附着系数、以及目标附着系数的置信度。
59、在一种实现方式中,处理模块,具体用于:
60、获取稳态附着系数与历史目标附着系数的系数差值;
61、根据激活时长确定调整系数,并将调整系数和系数差值的乘积确定为系数调整量;
62、将历史目标附着系数与系数调整量之和,确定为目标附着系数;
63、将目标附着系数的置信度确定为第六预设值。
64、第三方面,本技术实施例提供一种车辆,包括:
65、处理器,以及与处理器通信连接的存储器;
66、存储器,用于存储计算机执行指令;
67、处理器,用于执行存储器存储的计算机执行指令,以实现第一方面的附着系数的确定方法。
68、第四方面,本技术实施例提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现第一方面的附着系数的确定方法。
69、第五方面,本技术实施例提供一种计算机程序产品,包括计算机程序,计算机程序被处理器执行时用于实现如第一方面的附着系数的确定方法。
70、本技术实施例提供附着系数的确定方法、装置、车辆、介质及程序产品。该方法中,车辆可以获取车辆的至少一个参考附着系数、以及各参考附着系数的置信度。其中,至少一个参考附着系数包括如下至少一种:稳态附着系数、动态附着系数、纵向附着系数或横向附着系数。车辆还可以获取车辆的多个传感器的传感器状态,传感器状态为正常状态或者失效状态。车辆可以根据至少一个参考附着系数、各参考附着系数的置信度、以及多个传感器的传感器状态,确定车辆的目标附着系数、以及目标附着系数的置信度。通过上述方式,能够准确地确定出目标附着系数和目标附着系数的置信度,提高了确定附着系数的准确率,进而提高了车辆的防滑控制能力,提高了乘车人员的安全性。
- 还没有人留言评论。精彩留言会获得点赞!