自动驾驶避障方法、装置、存储介质及车辆与流程
本技术涉及自动驾驶,尤其涉及一种自动驾驶避障方法、装置、存储介质及车辆。
背景技术:
1、在自动驾驶车辆从起点行驶至目的地点的过程中,除了要躲避路上的各种障碍物安全去往目的地点之外,还需要应对各种特殊操作场景,根据前车的驾驶行为,采取有效的策略来进行脱困。例如在前车在进出路边的园区时,尤其是当前车为拖挂车且园区的门较小时,前车一般需要通过倒车的方式进出园区,此时,前车的盲区较大,对于自动驾驶车辆而言,需要采取相应的措施以保证前车和主车的安全。
2、目前,自动驾驶车辆对于包括拖挂车在内的大车倒车进入园区时的常规处理方式是根据预先设置的一个固定的安全距离阈值,以停止在某个位置等待大车完成进出园区操作,在这个过程中,自动驾驶车辆应对这种情况的方式过于单一,缺乏灵活性。因此,当前的自动驾驶车辆在前车进行倒车进出园区场景下的智能化水平较低。
技术实现思路
1、本技术的目的旨在至少能解决上述的技术缺陷之一,特别是现有技术中自动驾驶车辆在前车进行倒车进出园区场景下的智能化水平较低的技术缺陷。
2、第一方面,本技术提供了一种自动驾驶避障方法,所述方法包括:
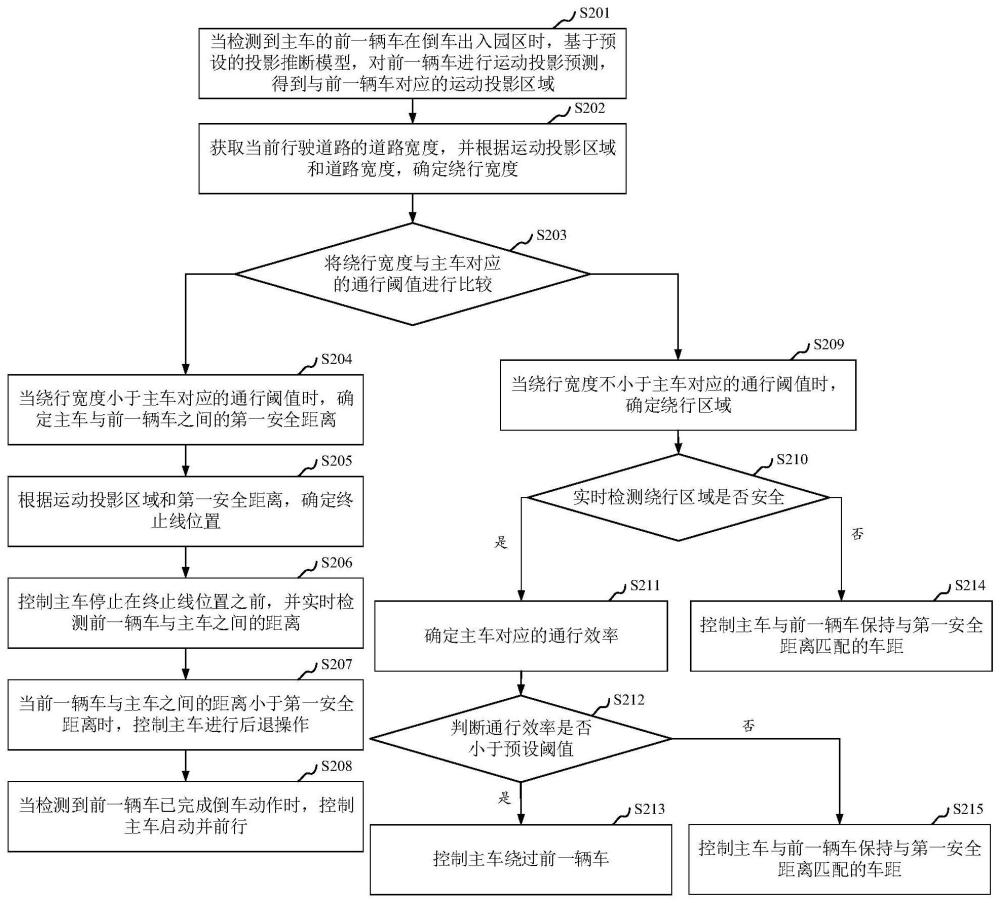
3、当检测到主车的前一辆车在倒车出入园区时,基于预设的投影推断模型,对所述前一辆车进行运动投影预测,得到与所述前一辆车对应的运动投影区域;
4、获取当前行驶道路的道路宽度,并根据所述运动投影区域和所述道路宽度,确定绕行宽度;
5、将所述绕行宽度与所述主车对应的通行阈值进行比较,当所述绕行宽度小于所述主车对应的通行阈值时,确定所述主车与所述前一辆车之间的第一安全距离;
6、根据所述运动投影区域和所述第一安全距离,确定终止线位置;
7、控制所述主车停止在所述终止线位置之前,并实时检测所述前一辆车与所述主车之间的距离;
8、当所述前一辆车与所述主车之间的距离小于所述第一安全距离时,控制所述主车进行后退操作;
9、当检测到所述前一辆车已完成倒车动作时,控制所述主车启动并前行。
10、在其中一个实施例中,所述根据所述运动投影区域和所述第一安全距离,确定终止线位置,包括:
11、确定所述运动投影区域中最靠近所述主车的边界点;
12、根据所述边界点,以与当前行驶道路垂直的形式确定边界线;
13、将所述边界线向所述主车方向平行移动与所述第一安全距离匹配的距离,以确定终止线位置。
14、在其中一个实施例中,所述基于预设的投影推断模型,对所述前一辆车进行运动投影预测,包括:
15、确定所述前一辆车的车辆类型;
16、检测所述前一辆车的车头与车身之间的夹角、园区出入口的位置及宽度;
17、将所述车辆类型、所述前一辆车的车头与车身之间的夹角和园区出入口的位置及宽度输入至所述投影推断模型中,得到所述前一辆车的运动投影区域;其中,所述投影推断模型用于根据输入的信息,利用车辆动力学原理进行分析,以输出车辆的运动投影区域。
18、在其中一个实施例中,所述根据所述运动投影区域和所述道路宽度,确定绕行宽度,包括:
19、根据所述运动投影区域,获取所述运动投影区域对应的宽度最大值;
20、将所述道路宽度与所述宽度最大值之差确定为绕行宽度。
21、在其中一个实施例中,所述方法还包括:
22、当所述绕行宽度不小于所述主车对应的通行阈值时,确定绕行区域,并实时检测所述绕行区域是否安全;
23、若所述绕行区域处于安全状态,则确定所述主车对应的通行效率;
24、若所述通行效率小于预设阈值,则控制所述主车绕过所述前一辆车。
25、在其中一个实施例中,所述方法还包括:
26、若所述绕行区域处于非安全状态,或,所述绕行区域处于安全状态且所述通行效率不小于所述预设阈值,则控制所述主车与所述前一辆车保持与所述第一安全距离匹配的车距。
27、在其中一个实施例中,所述确定所述主车对应的通行效率,包括:
28、获取多个预设的通行指标以及每个通行指标对应的系数;
29、根据各个通行指标,获取与每个通行指标对应的指标数据;
30、根据每个通行指标对应的系数,对每个通行指标对应的指标数据进行加权求和,以得到所述主车对应的通行效率。
31、在其中一个实施例中,所述控制所述主车绕过所述前一辆车,包括:
32、在所述主车绕行过程中,实时对所述主车与所述前一辆车之间的直线距离进行检测;
33、当所述主车与所述前一辆车之间的直线距离小于所述第一安全距离时,控制所述主车停止绕行,并控制主车进行后退操作。
34、在其中一个实施例中,所述方法还包括:
35、在控制所述主车进行后退操作时,确定所述主车与所述主车的后一辆车之间的第二安全距离,并检测所述主车与所述后一辆车之间的距离;
36、在保持所述主车与所述后一辆车之间的距离不小于所述第二安全距离的前提下控制所述主车进行后退操作;
37、当所述主车无法进行后退操作且所述主车与所述前一辆车之间的距离小于所述第一安全距离时,控制所述主车进行鸣笛示警。
38、第二方面,本技术提供了一种自动驾驶避障装置,所述装置包括:
39、运动投影预测模块,用于当检测到主车的前一辆车在倒车出入园区时,基于预设的投影推断模型,对所述前一辆车进行运动投影预测,得到与所述前一辆车对应的运动投影区域;
40、绕行宽度确定模块,用于获取当前行驶道路的道路宽度,并根据所述运动投影区域和所述道路宽度,确定绕行宽度;
41、阈值比较模块,用于将所述绕行宽度与所述主车对应的通行阈值进行比较,当所述绕行宽度小于所述主车对应的通行阈值时,确定所述主车与所述前一辆车之间的第一安全距离;
42、终止线确定模块,用于根据所述运动投影区域和所述第一安全距离,确定终止线位置;
43、距离检测模块,用于控制所述主车停止在所述终止线位置之前,并实时检测所述前一辆车与所述主车之间的距离;
44、后退控制模块,用于当所述前一辆车与所述主车之间的距离小于所述第一安全距离时,控制所述主车进行后退操作;
45、前进控制模块,用于当检测到所述前一辆车已完成倒车动作时,控制所述主车启动并前行。
46、第三方面,本技术提供了一种存储介质,所述存储介质中存储有计算机可读指令,所述计算机可读指令被一个或多个处理器执行时,使得一个或多个处理器执行如上述任一项实施例所述自动驾驶避障方法的步骤。
47、第四方面,本技术提供了一种车辆,包括:一个或多个处理器,以及存储器;
48、所述存储器中存储有计算机可读指令,所述一个或多个处理器执行时所述计算机可读指令时,执行如上述任一项实施例所述自动驾驶避障方法的步骤。
49、从以上技术方案可以看出,本技术实施例具有以下优点:
50、本技术提供的一种自动驾驶避障方法、装置、存储介质及车辆,该方法包括:当检测到主车的前一辆车在倒车出入园区时,基于预设的投影推断模型,对前一辆车进行运动投影预测,得到与前一辆车对应的运动投影区域。进而获取当前行驶道路的道路宽度,并根据运动投影区域和道路宽度,确定绕行宽度;将绕行宽度与主车对应的通行阈值进行比较。通过预测前一辆车的运动投影区域,以得到绕行宽度,以此判断主车是停止等待还是绕行,拓宽了主车在此场景下的应对方式。当绕行宽度小于主车对应的通行阈值时,确定主车与前一辆车之间的第一安全距离,并根据运动投影区域和第一安全距离,确定终止线位置,进而控制主车停止在所述终止线位置之前,并实时检测前一辆车与所述主车之间的距离,当前一辆车与所述主车之间的距离小于第一安全距离时,控制主车进行后退操作。当检测到前一辆车已完成倒车动作时,控制主车启动并前行。通过前一辆车的运动投影区域,确定终止线位置,并且实时检测前一辆车与主车之间的距离,而非通过设置一个固定的安全阈值来确定停车的位置,如此,能够提高自动驾驶系统在此场景下的应对灵活性,从而提高自动驾驶车辆在前车进行倒车进出园区场景下的智能化水平。
- 还没有人留言评论。精彩留言会获得点赞!