一种新能源汽车驱动装置运行管理方法
本发明涉及新能源汽车动力装置,更具体地说,本发明涉及一种新能源汽车驱动装置运行管理方法。
背景技术:
1、新能源汽车驱动装置通常包括控制器和电动机,控制器负责控制电动机的转速、扭矩输出以及其他相关功能,而电动机则负责将电能转换为机械能,驱动车辆前进,这两者之间通过控制信号进行通信和协作,共同完成车辆的动力传递和控制。
2、在新能源汽车的行驶过程中,新能源汽车驱动装置包括的控制器和电动机之间的协作的运行状态对新能源汽车的驱动装置的正常运行的影响很大,若不能及时发现控制器和电动机之间的协作运行存在的隐患,从而不能及时对控制器和电动机之间的协作进行管理,可能会导致新能源汽车驱动装置的故障或不稳定,影响新能源汽车的动力输出和行驶性能,甚至导致新能源汽车无法正常行驶。
3、为了解决上述问题,现提供一种技术方案。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种新能源汽车驱动装置运行管理方法以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种新能源汽车驱动装置运行管理方法,包括如下步骤:
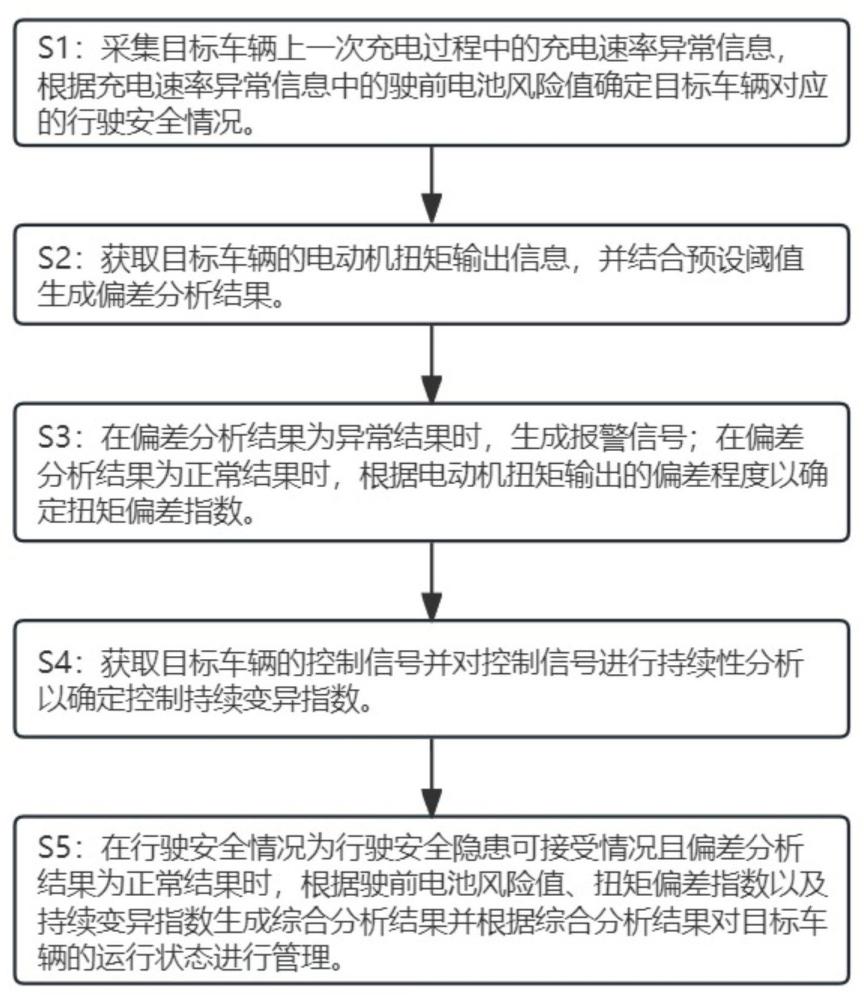
4、s1:采集目标车辆上一次充电过程中的充电速率异常信息,根据充电速率异常信息中的驶前电池风险值确定目标车辆对应的行驶安全情况;
5、s2:获取目标车辆的电动机扭矩输出信息,并结合预设阈值生成偏差分析结果;
6、s3:在偏差分析结果为异常结果时,生成报警信号;在偏差分析结果为正常结果时,根据电动机扭矩输出信息中的偏差程度以确定扭矩偏差指数;
7、s4:获取目标车辆的控制信号并对控制信号进行持续性分析以确定控制持续变异指数;
8、s5:在行驶安全情况为行驶安全隐患可接受情况且偏差分析结果为正常结果时,根据驶前电池风险值、扭矩偏差指数以及持续变异指数生成综合分析结果并根据综合分析结果对目标车辆的运行状态进行管理。
9、在一个优选的实施方式中,在s1中,驶前电池风险值的获取逻辑为:
10、将目标车辆上一次充电过程根据时间分割成多个等长的充电监测区间;
11、计算每个充电监测区间内的充电速率,获取充电监测区间的数量,将充电监测区间的数量标记为,将充电监测区间对应的充电速率标记为,为充电监测区间的编号,,均为大于1的整数;
12、使用差分运算评估充电速率的突变程度,具体为:
13、对全部的充电监测区间对应的充电速率按照时间顺序进行一阶差分运算,得到个充电速率差分值,充电速率差分值的表达式为:,其中,为第个充电速率差分值,是充电速率差分值的编号;
14、通过标准差对充电速率差分值进行分析,计算驶前电池风险值,其表达式为:
15、,其中,为驶前电池风险值,为所有充电速率差分值的平均值;
16、设定驶前电池风险阈值;将驶前电池风险值与驶前电池风险阈值进行比较:
17、当驶前电池风险值大于驶前电池风险阈值时,则判定充电后的电池对目标车辆行驶的安全隐患程度为行驶安全隐患大;当驶前电池风险值小于等于驶前电池风险阈值时,则判定充电后的电池对目标车辆行驶的安全隐患程度为行驶安全隐患可接受。
18、在一个优选的实施方式中,充电监测区间对应的充电速率计算公式为:
19、,其中,分别为充电监测区间终点的电池充电量、充电监测区间起点的电池充电量以及充电监测区间对应的时间长度。
20、在一个优选的实施方式中,在s2中,电动机扭矩输出信息包括扭矩输出异常比,扭矩输出异常比获取逻辑为:
21、设定扭矩监测区间;在扭矩监测区间内均匀设置多个监测点,获取每个监测点对应的命令扭矩输出值以及命令扭矩输出值对应的电动机的实际扭矩输出值,计算每个监测点对应的扭矩输出偏差值,扭矩输出偏差值为监测点对应的命令扭矩输出值与命令扭矩输出值对应的电动机的实际扭矩输出值的偏差值;
22、设定扭矩输出偏差阈值;获取扭矩监测区间内监测点对应的扭矩输出偏差值大于扭矩输出偏差阈值的数量,将扭矩监测区间内监测点对应的扭矩输出偏差值大于扭矩输出偏差阈值的数量与扭矩监测区间内监测点的总数量的比值标记为扭矩输出异常比;
23、判断扭矩输出异常比是否超出预设阈值,生成偏差分析结果:
24、当扭矩输出异常比超出预设阈值,判定偏差分析结果为异常结果;当扭矩输出异常比未超出预设阈值,判定偏差分析结果为正常结果。
25、在一个优选的实施方式中,在s3中,当偏差分析结果为异常结果时,生成报警信号;
26、当偏差分析结果为正常结果时,对电动机扭矩输出的偏差程度进行分析,计算扭矩偏差指数,具体为:
27、获取扭矩监测区间内每个监测点的扭矩输出偏差值,根据扭矩监测区间的整体的电动机的扭矩偏差程度,计算得到扭矩偏差指数,其表达式为:,其中,分别为扭矩偏差指数、扭矩监测区间内第个监测点的扭矩输出偏差值以及扭矩监测区间对应的时间长度,分别为扭矩监测区间内监测点的数量以及扭矩监测区间内监测点的编号,,且均为正整数。
28、在一个优选的实施方式中,在s4中,设置控制信号集合,控制信号集合包括多个控制器对电动机发送的控制信号;
29、获取在控制信号集合内每个控制器对电动机发送的控制信号的实际发送时间,获取控制信号发送时间阈值,若控制器对电动机发送的控制信号的实际发送时间大于控制信号发送时间阈值,则将该控制信号标记为延时控制信号;
30、获取控制信号集合内所有的延时控制信号,并获取延时控制信号对应的时间点,计算每相邻的两个延时控制信号之间的时间间隔,将相邻的两个延时控制信号之间的时间间隔标记为信号延时间隔值;
31、设定信号延时间隔阈值;获取控制信号集合内信号延时间隔值的数量,将控制信号集合内延时控制信号的数量与控制信号集合内控制器对电动机发送的控制信号的数量的比值标记为信号延时数量比;
32、获取控制信号集合内信号延时间隔值小于信号延时间隔阈值的数量,将控制信号集合内信号延时间隔值小于信号延时间隔阈值的数量与控制信号集合内控制器对电动机发送的控制信号的数量的比值标记为信号异常频率密度比;
33、将信号延时数量比和信号异常频率密度比进行无量纲化处理,将无量纲化处理后的信号延时数量比和信号异常频率密度比进行加权求和,计算控制持续变异指数,其表达式为:,其中,分别为控制持续变异指数、信号延时数量比以及信号异常频率密度比,分别为信号延时数量比以及信号异常频率密度比的权重系数,且大于0。
34、在一个优选的实施方式中,在s5中,将驶前电池风险值、扭矩偏差指数以及控制持续变异指数进行归一化处理,通过将归一化处理后的驶前电池风险值、扭矩偏差指数以及控制持续变异指数分别赋予预设比例系数,计算得到协作运行风险预警系数;
35、设定协作运行风险预警阈值;将目标车辆行驶中的控制器和电动机协作过程对应的协作运行风险预警系数与协作运行风险预警阈值进行比较:
36、当协作运行风险预警系数大于协作运行风险预警阈值时,则判定生成协作运行预警信号;
37、当协作运行风险预警系数小于等于协作运行风险预警阈值时,则判定生成协作运行正常信号。
38、本发明一种新能源汽车驱动装置运行管理方法的技术效果和优点:
39、1、通过采集新能源汽车上一次充电过程的充电速率异常信息,能够及时发现电池充电过程中可能存在的异常情况,从而预警可能的安全隐患,这有助于在行车之前对电池状态进行评估,并根据风险程度对行车安全隐患进行分类,为行车安全提供了重要依据;通过判断电动机的扭矩输出异常的占比并在占比未超出预设阈值时计算扭矩偏差指数,根据控制信号持续性的分析来计算控制持续变异指数,这有助于及时发现电动机输出异常以及控制信号持续性问题,从而减少因动力系统故障或控制系统异常导致的车辆失控风险。
40、2、在行驶安全隐患可接受情况下且电动机的扭矩输出异常的占比未超出预设阈值时,综合分析驶前电池风险值、扭矩偏差指数以及控制持续变异指数,对控制器和电动机协作过程的运行状态进行判断,这有助于系统优化控制器和电动机之间的协作,提高车辆的驾驶稳定性和动力输出效率。有效地评估了新能源汽车驱动装置在行驶过程中的运行状态,并做出判断,以实现对新能源汽车驱动装置运行管理的目的。
- 还没有人留言评论。精彩留言会获得点赞!