一种考虑驾驶风格的车辆轨迹预测与行为决策方法和系统
本发明涉及自动驾驶,特别是指一种考虑驾驶风格的车辆轨迹预测与行为决策方法和系统。
背景技术:
1、自动驾驶技术是近年来汽车行业和信息技术领域的热门话题之一。这项技术的发展和应用不仅能够改善交通安全、提高道路利用率,还有望彻底改变人们的出行方式和城市交通系统。在一套相对成熟的自动驾驶技术体系中,环境感知模块可类比为车辆的感知器官,而决策规划模块则可视作车辆的智能中枢。现有的行为决策算法虽然能够在一定程度上保证行车安全和效率,但通常缺乏处理复杂路况的灵活性。
2、目前,现有的行为决策技术还存在以下问题:
3、1.现有的行为决策算法往往过于理想化,绝大部分决策方法都是建立在先验规则基础之上的,而在车辆实际驾驶中,会遇到包括交通场景覆盖面不广、规则设计难度大以及拓展性受限等一系列问题,现有技术难以处理。
4、2.当前道路上仍存在自动驾驶汽车和手动驾驶汽车并行的情况,为了确保道路交通的安全和流畅,必须确保自动驾驶汽车和手动驾驶汽车之间的行为更加一致。面对相同的驾驶情境时,不同风格的驾驶员会做出不同的行为决策,有些驾驶员选择变道,而有些则选择继续行驶在当前车道。然而,现有技术没有考虑各类驾驶员或乘客的个性化偏好。
5、3.想要在城市等复杂场景中实现安全、高效、舒适地行驶,准确预测周围车辆的行驶轨迹是必须解决的关键问题之一。现有技术未考虑自我车辆与周围车辆之间复杂的交互关系,没有将车辆的预测轨迹纳入决策系统,影响决策的准确性。
6、因此,研发一种能够在保证驾驶安全的前提下,仍然可以灵活应对各种交通环境的行为决策系统显得尤为重要。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种考虑驾驶风格的车辆轨迹预测与行为决策方法和系统,充分考虑驾驶员个性化的驾驶风格,对周围车辆的轨迹进行预测,并充分利用以上信息进行行为决策,提高车辆行为决策的准确性、安全性和实时性。
2、为解决上述技术问题,本发明提供如下技术方案:
3、一方面,提供了一种考虑驾驶风格的车辆轨迹预测与行为决策方法,所述方法包括以下步骤:
4、s1、获取驾驶行为数据集,对所述驾驶行为数据集进行数据处理,得到用于车辆轨迹预测的平衡化数据集;
5、所述平衡化数据集中还包含基于驾驶风格分类器对所述驾驶行为数据集进行分类得到的驾驶风格向量标签;
6、s2、构建基于贝叶斯优化融合离散余弦变换注意力机制的长短时记忆网络,用于进行车辆轨迹预测;
7、其中,利用所述平衡化数据集对所述长短时记忆网络进行训练和测试;
8、s3、结合多车道变道场景的安全因子、舒适因子、效率因子、增益因子,以及驾驶风格向量标签和车辆轨迹预测信息,采用深度学习模型实现车道变更行为决策。
9、可选地,所述步骤s1中,对所述驾驶行为数据集进行数据处理,具体包括:
10、基于小波变换去噪算法对所述驾驶行为数据集进行滤波;
11、对滤波后的驾驶行为数据集进行筛选,剔除无用特征;
12、添加新特征,包括:车辆行驶航向角,左车道标签和右车道标签,车道变更标签,车辆速度和加速度,驾驶风格分类器得到的驾驶风格向量标签;
13、采用滑动窗口法对添加新特征后的驾驶行为数据集进行数据对齐处理;
14、将数据对齐后的驾驶行为数据集划分为训练集和测试集,其中80%的数据分配给训练集,20%的数据分配给测试集,得到所述平衡化数据集。
15、可选地,所述步骤s1中,基于驾驶风格分类器对所述驾驶行为数据集进行分类得到驾驶风格向量标签,具体包括:
16、从所述驾驶行为数据集中选取多个驾驶行为特征参数,包括:最大速度、平均速度、速度标准差、横向速度最大值、横向速度均值、横向速度标准差、加速度绝对值最大值、加速度绝对值均值、加速度标准差、最大绝对横向加速度、平均绝对横向加速度、横向加速度标准差、最小跟车距离、平均跟车距离、跟车距离标准差、最小车头时距、车头时距均值、车头时距标准差、行驶距离;
17、采用主成分分析法降低所述驾驶行为特征参数的维度;
18、基于k均值聚类算法对降维后的驾驶行为特征参数进行聚类分析,将驾驶风格聚类为两类,分别用向量1和向量2进行标注,得到驾驶风格向量标签;其中,向量1和向量2分别对应激进型驾驶风格和保守型驾驶风格。
19、可选地,所述步骤s2中,构建基于贝叶斯优化融合离散余弦变换注意力机制的长短时记忆网络,具体包括:
20、采用单层卷积神经网络对输入的目标车辆状态观测特征向量进行潜在特征提取;
21、将提取的潜在特征输入长短时记忆网络,并引入基于离散余弦变换的频率增强通道注意力机制;
22、利用贝叶斯优化算法对模型的超参数进行优化,并定义均方误差函数为贝叶斯优化算法最小化的目标函数。
23、可选地,利用单层卷积神经网络进行潜在特征提取,所述目标车辆状态观测特征向量input(t)表示如下:
24、input(t)=[x(t),y(t),v(t),a(t),d(t),t(t),l,w]
25、其中,x(t)和y(t)分别表示预测目标车辆轨迹的横向坐标和纵向坐标,v(t)和a(t)分别表示预测目标车辆的瞬时速度和加速度,d(t)表示周围车辆与预测目标车辆之间的跟车距离,t(t)表示周围车辆与预测目标车辆之间的车头时距,l和w分别为预测目标车辆的长度和宽度。
26、可选地,利用贝叶斯优化算法优化模型的超参数,所述目标函数为:
27、
28、其中,nt表示样本数量,表示第t个样本的真实值,表示模型对第t个样本的预测值。
29、可选地,所述步骤s3中,采用深度学习模型实现车道变更行为决策,具体包括:
30、结合多车道变道场景,综合考虑以下因素:安全因子ssafe、舒适因子ccomfort、效率因子eefficiency、增益因子ggain、驾驶风格向量标签tstyle和周围车辆轨迹预测信息ppredicted,构建车道变更决策向量,如下式所示:
31、f=flc(ssafe,ccomfort,eefficiency,ggain,tstyle,ppredicted)
32、其中,f是一个三元素的车道变更决策向量,对应于车道保持、左车道变更和右车道变更的概率,flc(·)是基于上述输入因素的车道变更概率函数。
33、可选地,所述安全因子ssafe表示为:
34、ssafety=fs(dlp,drp,dcp,dth)
35、其中,dlp表示自车与左前方车辆的纵向距离,drp表示自车与右前方车辆的纵向距离,dcp表示自车与当前车道上的前车的纵向距离,dth表示最小安全距离;
36、所述舒适因子ccomfort表示为:
37、
38、式中,x(t)和y(t)分别表示当前车辆行驶时刻t对应的横向坐标和纵向坐标,ax(t)和ay(t)分别表示当前车辆行驶时刻t对应的横向加速度和纵向加速度;
39、所述效率因子eefficiency表示为:
40、eefficiency=fe(s(t),v(t))
41、式中,s(t)和v(t)分别表示当前车辆行驶时刻t对应的行驶距离及行驶速度;
42、所述增益因子ggain表示为:
43、ggain=fg((vcp-ve),(vlp-ve),(vrp-ve),dlp)-dcp),(drp-dcp))
44、其中,ve表示自车行驶速度,vcp是当前车道前车的行驶速度,vlp和vrp分别表示左车道和右车道中的前车行驶速度;dcp是当前车道上自车与前车之间的车头时距,dlp和drp分别表示本车与左车道和右车道中的前车的车头时距;
45、将驾驶风格向量标签tstyle和周围车辆轨迹预测信息ppredicted与上述各个因子中的参数向量级联,然后输入全连接神经网络,最终输出三类行为决策结果之一,即车道保持、左车道变更或右车道变更。
46、另一方面,提供了一种考虑驾驶风格的车辆轨迹预测与行为决策系统,用于实现上述任一项所述的方法,所述系统包括:
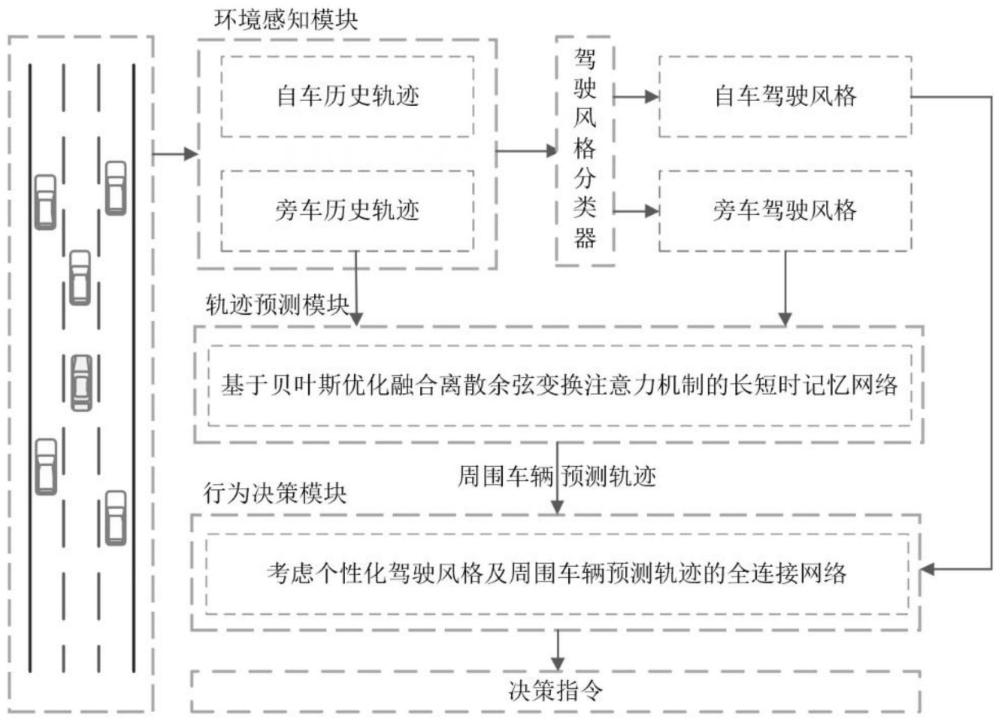
47、环境感知模块,用于获取驾驶行为数据集,对所述驾驶行为数据集进行数据处理,得到用于车辆轨迹预测的平衡化数据集;
48、所述平衡化数据集中还包含基于驾驶风格分类器对所述驾驶行为数据集进行分类得到的驾驶风格向量标签;
49、轨迹预测模块,用于构建基于贝叶斯优化融合离散余弦变换注意力机制的长短时记忆网络,进行车辆轨迹预测;
50、其中,利用所述平衡化数据集对所述长短时记忆网络进行训练和测试;
51、行为决策模块,用于结合多车道变道场景的安全因子、舒适因子、效率因子、增益因子,以及驾驶风格向量标签和车辆轨迹预测信息,采用深度学习模型实现车道变更行为决策。
52、另一方面,提供了一种电子设备,所述电子设备包括:
53、处理器;
54、存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器加载并执行时,实现如上述车辆轨迹预测与行为决策方法的步骤。
55、另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有程序代码,所述程序代码可被处理器调用执行如上述车辆轨迹预测与行为决策方法的步骤。
56、本发明提供的技术方案带来的有益效果至少包括:
57、1.本发明提出了一种全新的基于深度学习的决策框架,能够准确模仿预测人类的行为决策。该框架不仅充分考虑了驾驶员个性化的驾驶风格,还综合考虑了周围驾驶车辆轨迹的不确定性。相较于传统方法,本发明能够更精准地模拟人类的换道决策过程。
58、2.本发明提出了一种新的驾驶风格分类器,对驾驶行为数据集中的驾驶轨迹进行分类,并将分类结果转化为驾驶风格向量标签,添加到原始数据集中,作为轨迹预测和行为决策网络训练的重要参数之一。这一方法有助于更有效地满足不同驾驶风格驾驶员的决策需求。
59、3.本发明设计并训练了一种基于离散余弦变换注意力机制的长短时记忆网络用于进行周围车辆的轨迹预测,并采用贝叶斯优化算法对其进行参数优化。该网络能够显著提升车辆轨迹预测的准确率,使行为决策系统能够更高效地适应周边复杂的交通情况。
- 还没有人留言评论。精彩留言会获得点赞!