一种露天矿用自卸车无人驾驶系统的制作方法
本发明涉及网络通信,特别是涉及一种露天矿用自卸车无人驾驶系统。
背景技术:
1、基于矿山行业的痛点需求,结合露天矿无人机巡检、无人矿卡作业、传感器信息采集等主要业务场景和对应的网络要求,对业务场景分为两大类,一类是大带宽需求,包括矿卡上的摄像头、传感器数据回传等业务场景,二是低时延需求,包括无人矿卡的远程控制等场景。尤其是现阶段的矿用车无人驾驶,可以高效提高生产生活的效率,同时确保各方面的安全,目前的无人驾驶,还存在各方面的协同困难,调度慢等问题。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明提出一种露天矿用自卸车无人驾驶系统,将实现矿用自卸车在“装载—运输—卸载”典型作业过程的完全无人自主运行,并可与人工驾驶的挖掘机、推土机等工程车辆协同工作,以验证露天矿用自卸车无人驾驶系统的可行性、适应性以及经济性,并考核其稳定性。
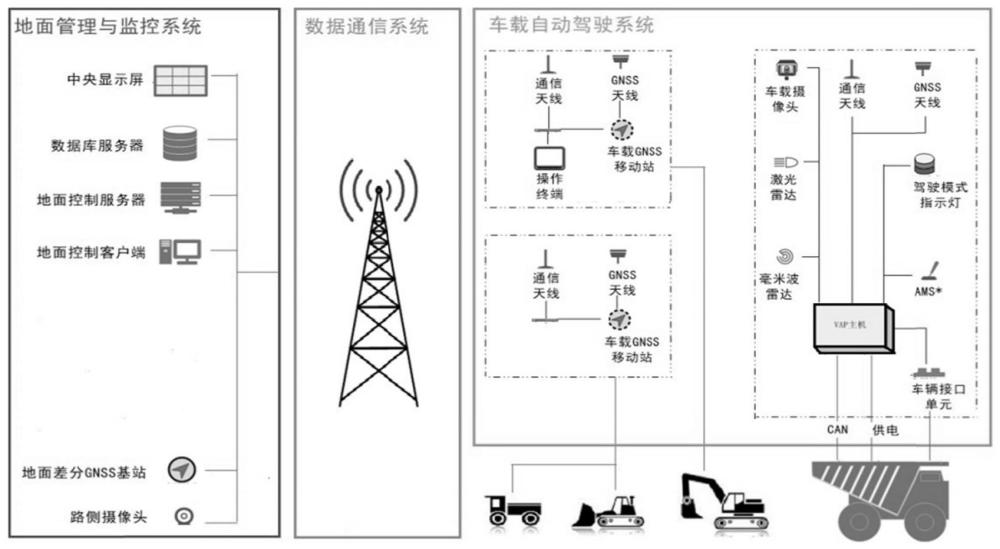
3、为达上述目的,本发明一方面提出一种露天矿用自卸车无人驾驶系统,包括地面管理与监控系统、车载自动驾驶系统和数据通信系统;其中,
4、所述地面管理与监控系统,至少包括地面控制服务器和数据库服务器,所述数据库服务器用于提供运营所需的矿山地图管理服务信息,以及接收运营过程中的矿区车辆信息和矿区设备状态;
5、所述车载自动驾驶系统,用于所述从地面管理与监控系统中接收作业任务与路径信息,根据所述地面控制服务器下发的指令内容解析所需要执行的任务和路径规划信息,并向自身执行器下达车辆控制指令以控制矿用自卸车执行任务;
6、所述数据通信系统,用于将所述矿区车辆信息和矿区设备状态以及矿区监控信息实时传回至所述数据库服务器,同时将所述车辆控制命令和所述路径规划信息实时传输至车载自动驾驶系统,以实现各子系统间的信息互联。
7、另外,根据本发明上述实施例的露天矿用自卸车无人驾驶系统还可以具有以下附加的技术特征:
8、进一步地,在本发明的一个实施例中,还包括外部接口,所述外部接口,包括人员接口与设备接口;其中,所述人员接口,包括与矿山工作人员的接口,所述设备接口,包括与矿山系统/设备的接口;所述地面管理与监控系统,包括用户权限管理、矿山地图管理、作业调度、路径规划、安全防护、运行监控、提示提醒、远程控制和异常处理模块中的多种;所述车载自动驾驶系统,包括:高精度定位、障碍物检测、车辆运行控制、车辆安全防护和故障诊断模块中的多种。
9、进一步地,在本发明的一个实施例中,所述路径规划模块,用于:
10、为无人驾驶自卸车规划一条从起点至终点的运行路径;
11、根据运行路径的起点、终点信息的确定方式,将路径规划分为任务式路径规划和交互式路径规划两种形式;
12、在任务式路径规划方式下,运行路径的起点和终点由地面管理与监控系统通过作业调度功能分配,在交互式路径规划方式下,运行路径的起点和终点由调度员指定。
13、进一步地,在本发明的一个实施例中,所述安全防护模块,包括限速设置单元和第一主动防撞单元;
14、所述限速设置单元,用于设置车辆运行时的最大速度,当车辆实际速度超过最大速度时向车辆发送紧急停车指令;或者,设置指定地图单元的最大速度,当无人驾驶车辆经过地图单元的速度超过最大速度时,向车辆发送紧急停车指令;
15、所述第一主动防撞单元,用于通过车载自动驾驶系统将传感器检测到的障碍物信息反馈至地面管理与监控系统,在矿山地图显示界面上进行标记,并给出警告信息;同时,计算车辆是否可能与障碍物发生碰撞,当存在碰撞的可能性时,向车辆发送紧急停车指令。
16、进一步地,在本发明的一个实施例中,所述运行监控模块,用于对矿山全局状态、车辆自身状态、无人驾驶系统运行状态进行监控,并通过显示界面可视化;其中,所述矿山全局状态通过中央显示屏可视化,所述车辆自身状态由车载自动驾驶系统通过与车辆的接口进行采集,并转发至地面管理与监控系统,在地面控制客户端上进行显示;
17、所述无人驾驶系统运行状态通过所述地面控制客户端进行可视化;
18、所述矿山全局状态,包括的所有无人驾驶车辆位置信息、人工驾驶车辆位置信息、障碍物信息;
19、所述车辆自身状态,包括车辆类型、燃油量、水量、蓄电池状态、发动机状态、当前档位、转向角度、车厢举升状态、车辆故障信息;
20、所述无人驾驶系统运行状态,包括地面管理与监控系统运行状态、车载自动驾驶系统运行状态和数据通信系统状态;其中,所述地面管理与监控系统运行状态,为各个服务器、工作站等设备的运行状态,包括cpu使用情况、内存使用情况、存储容量使用情况、主备切换信息、故障信息;所述车载自动驾驶系统运行状态,包括车辆位置、速度、运行方向、偏离参考路径情况、装载信息、传感器数据、vap故障信息;所述数据通信系统状态,包括gms地面设备间的有线通信链路状态和车地之间的无线通信链路状态。
21、进一步地,在本发明的一个实施例中,所述高精度定位模块,用于:
22、接收和解析地面差分gnss基站发送的差分定位信号,以通过车载差分gnss移动站对车辆进行绝对位置估算得到车辆位置估算结果;
23、基于所述车辆位置估算结果和imu定位信息得到车辆定位结果;
24、根据所述车辆定位结果和矿山地图信息,确定车辆在矿山地图中的准确位置信息。
25、进一步地,在本发明的一个实施例中,所述障碍物检测模块,用于:
26、通过安装在车辆上的激光雷达与毫米波雷进行障碍物检测以得到多源传感器数据;
27、对所述多源传感器数据进行分析融合以得到障碍物检测结果;其中,所述障碍物检测结果,包括障碍物的位置、大小和速度信息。
28、进一步地,在本发明的一个实施例中,所述车辆运行控制模块,用于:
29、车辆运行控制模块包括车辆上层动力学控制单元和车辆底层控制单元;其中,所述车辆上层动力学控制单元根据地面管理与监控系统下发的参考路径信息和车辆当前位姿状态进行车辆纵横向动力学解算,得出横向期望前轮转角和纵向期望加速度。
30、所述车辆底层控制单元,用于根据横向期望前轮转角和纵向期望加速度进行非线性底层动力学解算,得出期望发动机转速、期望制动力和期望前轮转角,并将所述期望发动机转速、期望制动力和期望前轮转角输出给驱动系统以及车辆接口单元执行。
31、进一步地,在本发明的一个实施例中,所述车辆安全防护模块,包括第二主动防撞单元、速度限制单元和路径偏离防护单元,其中,
32、所述第二主动防撞单元,用于当检测到车辆运行路径上存在障碍物时,根据障碍物的位置、大小和速度信息以及预测的车辆运行轨迹信息综合判断是否可能发生碰撞,以控制车辆紧急停车;
33、所述速度限制单元,用于比较限速设置单元的限速与车辆的实时速度,根速度比较结果控制车辆停车;
34、所述路径偏离单元,用于在控制车辆运行过程中,判断若车辆实际位置偏离参考路径的距离超过限定值,则控制车辆紧急停车。
35、进一步地,在本发明的一个实施例中,所述故障诊断模块,还用于:
36、在车辆开放相关接口的情况下,实时收集并汇总车辆故障信息和自身运行故障信息;
37、根据车辆故障信息和自身运行故障信息综合判断故障的严重程度;
38、根据所述严重程度对所有故障进行分级,并针对不同等级的故障采用不同的处理方式。
39、本发明实施例的露天矿用自卸车无人驾驶系统,实现矿用自卸车作业过程的完全无人自主运行,并可与人工驾驶的挖掘机、推土机等工程车辆协同工作,自动维护矿区运营进度信息,为用户提供清晰、直观的矿区信息综合显示及人工干预控制和实现各子系统间安全和高效的信息互联。
40、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!