本技术涉及重型amt(automatic mechanicaltransmission,自动机械式变速箱)商用车控制领域,具体涉及一种基于多意图预测的amt滑行模式决策控制方法及装置。
背景技术:
1、商用车amt车辆在驾驶过程中,存在普遍的0油门滑行工况,按车速可区分为高速滑行和低速滑行,其中高速滑行分为长时经济滑行和短时控速滑行,低速滑行又分为减速滑行和停车滑行。在滑行过程中,基于驾驶员需求,变速箱控制器tcu(transmissioncontrol unit,自动变速箱控制单元)需准确识别区分滑行模式,进而通过操作离合器、发动机、变速箱实现智能的档位决策控制,操控合适的选换挡方式,以满足驾驶员特定整车指标需求,达成经济性、动力性、舒适性指标,满足驾驶预期。
2、然而当前重型amt商用车的滑行过程未做清晰预测和分解,同时针对不同驾驶员的滑行意图,amt的档位决策应对措施未清晰定义,在整车滑行过程中离合器、变速箱的选换档控制,难以兼顾驾驶员对经济性、动力性、平顺性、舒适性等各整车指标的需求目标。
技术实现思路
1、本技术提供一种基于多意图预测的amt滑行模式决策控制方法及装置,能够根据不同的滑行模式,tcu智能应对控制不同的变速箱选换挡序列。
2、第一方面,本技术实施例提供一种基于多意图预测的amt滑行模式决策控制方法,所述基于多意图预测的amt滑行模式决策控制方法包括:
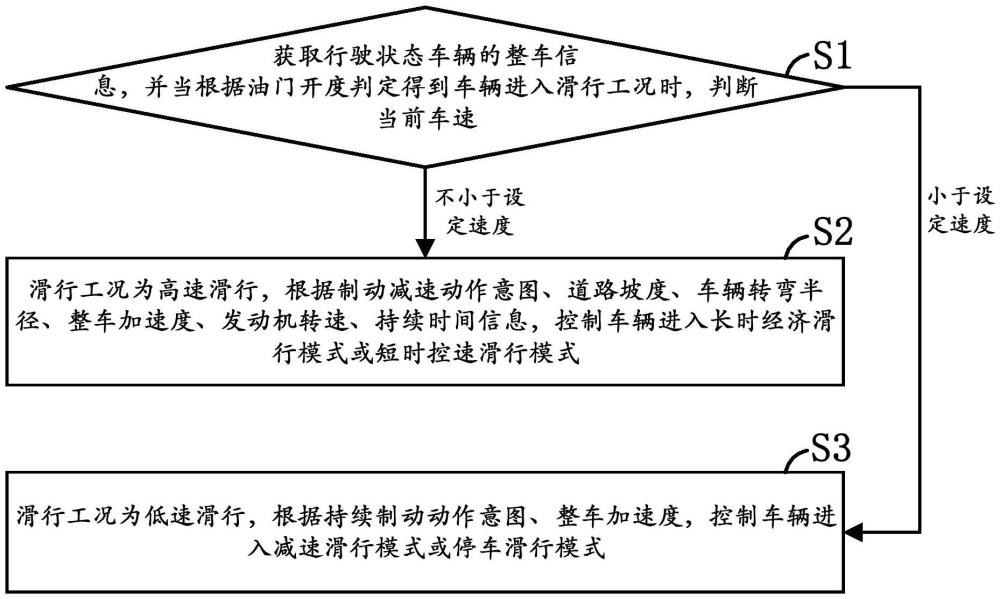
3、获取行驶状态车辆的整车信息,并当根据油门开度判定得到车辆进入滑行工况时,判断当前车速:
4、若车速不小于设定速度,则滑行工况为高速滑行,根据制动减速动作意图、道路坡度、车辆转弯半径、整车加速度、发动机转速、持续时间信息,控制车辆进入长时经济滑行模式或短时控速滑行模式;
5、若车速小于设定速度,则滑行工况为低速滑行,根据持续制动动作意图、整车加速度,控制车辆进入减速滑行模式或停车滑行模式;
6、其中,所述长时经济滑行模式下变速箱执行摘空挡操作,所述短时控速滑行模式下变速箱执行正常换挡操作,且滑行过程中禁止升档,所述减速滑行模式下变速箱执行跳跃降档操作,所述停车滑行模式下变速箱执行回空挡再进起步档位操作。
7、结合第一方面,在一种实施方式中,所述获取行驶状态车辆的整车信息,并当根据油门开度判定得到车辆进入滑行工况时,判断当前车速,具体包括:
8、当车辆处于行驶状态时,基于tcu获取得到车辆的整车信息,并对车辆的油门开度进行判断:
9、若油门开度为0,则判定车辆进入滑行工况,获取车辆的当前车速,并对当前车速进行判断;
10、若油门开度不为0,则结束。
11、结合第一方面,在一种实施方式中,所述根据制动减速动作意图、道路坡度、车辆转弯半径、整车加速度、发动机转速、持续时间信息,控制车辆进入长时经济滑行模式或短时控速滑行模式,具体包括:
12、当设定前置条件满足时,计时器开始计时,且持续计时时间大于设定时间,且在持续计时过程中,整车加速度的绝对值不大于设定加速度值,同时发动机转速的偏差位于设定偏差范围内,则控制车辆进入长时经济滑行模式;
13、当存在制动减速动作、整车加速度的绝对值大于设定加速度值或车辆转弯半径不大于设定半径值,则控制车辆进入短时控速滑行模式;
14、其中,在计时器计时过程中,若设定前置条件不满足,则计时器停止计时;所述设定前置条件基于制动减速动作意图、道路坡度、车辆转弯半径进行判断。
15、结合第一方面,在一种实施方式中,
16、当不存在制动减速动作、道路坡度的绝对值不大于设定坡度值且车辆转弯半径大于设定半径值,则设定前置条件满足,反之,则设定前置条件不满足;
17、所述发动机转速的偏差位于设定偏差范围内,具体的,当满足(n0-noffset)<n<(n0+noffset)时,则发动机转速的偏差位于设定偏差范围内,反之,发动机转速的偏差不位于设定偏差范围内,其中,n表示发动机的当前转速,n0表示油门开度为0,车辆进入滑行工况时,发动机的转速,noffset表示设定转速调节值。
18、结合第一方面,在一种实施方式中,所述根据持续制动动作意图、整车加速度,控制车辆进入减速滑行模式或停车滑行模式,具体包括:
19、当不存在持续制动动作且整车加速度的绝对值不大于预设加速度值,则控制车辆进入减速滑行模式;
20、当存在持续制动动作或整车加速度的绝对值大于预设加速度值,则控制车辆进入停车滑行模式。
21、结合第一方面,在一种实施方式中,对于控制车辆进入长时经济滑行模式、短时控速滑行模式、减速滑行模式或停车滑行模式,具体包括:
22、基于判断得到的车辆当前需进入的滑行模式,tcu发出执行指令,变速箱执行对应换挡序列,离合器和发动机执行对应的匹配动作,控制车辆执行相应的滑行模式。
23、结合第一方面,在一种实施方式中,当车辆进入长时经济滑行模式之后,还包括:
24、若存在制动减速动作、整车加速度的绝对值大于设定加速度值或车辆转弯半径不大于设定半径值,则控制车辆进入短时控速滑行模式;
25、若车速小于设定速度,且存在持续制动动作或整车加速度的绝对值大于预设加速度值,则控制车辆进入停车滑行模式。
26、结合第一方面,在一种实施方式中,当车辆进入短时控速滑行模式之后,还包括:
27、若车速小于设定速度,且存在持续制动动作或整车加速度的绝对值大于预设加速度值,则控制车辆进入停车滑行模式;
28、若车速小于设定速度,则控制车辆进入减速滑行模式。
29、结合第一方面,在一种实施方式中,当车辆进入减速滑行模式之后,还包括:
30、若存在持续制动动作或整车加速度的绝对值大于预设加速度值,则控制车辆进入停车滑行模式。
31、第二方面,本技术实施例提供一种基于多意图预测的amt滑行模式决策控制装置,包括:
32、判断模块,其用于获取行驶状态车辆的整车信息,并当根据油门开度判定得到车辆进入滑行工况时,判断当前车速,若车速不小于设定速度,则滑行工况为高速滑行,并驱使第一执行模块工作,若车速小于设定速度,则滑行工况为低速滑行,并驱使第二执行模块工作;
33、第一执行模块,其用于根据制动减速动作意图、道路坡度、车辆转弯半径、整车加速度、发动机转速、持续时间信息,控制车辆进入长时经济滑行模式或短时控速滑行模式;
34、第二执行模块,其用于根据持续制动动作意图、整车加速度,控制车辆进入减速滑行模式或停车滑行模式;
35、其中,所述长时经济滑行模式下变速箱执行摘空挡操作,所述短时控速滑行模式下变速箱执行正常换挡操作,且滑行过程中禁止升档,所述减速滑行模式下变速箱执行跳跃降档操作,所述停车滑行模式下变速箱执行回空挡再进起步档位操作。
36、本技术实施例提供的技术方案带来的有益效果包括:
37、通过对滑行过程车速、整车加速度、制动状态,道路坡度、弯道半径等信息处理分析,预测定义驾驶员滑行意图,根据不同的滑行模式,tcu智能应对控制不同的变速箱选换挡序列/方式,达到动力响应优先、经济性优先、噪声舒适性优先等目的。