一种后视镜的控制方法、装置、车辆和存储介质与流程
本技术涉及车辆领域,并且更具体地,涉及车辆领域中一种后视镜的控制方法、装置、车辆和存储介质。
背景技术:
1、目前市面上的车辆对外后视镜的控制,通常是采用门控系统或域控系统进行控制。并且目前大多数的控制方式,都采用三个电机(比如电机1、电机2和电机3)对外后视镜进行控制,具体而言,电机1用于控制外后视镜镜面向上或向下调整,电机2用于控制外后视镜镜面向左或向右调整,电机3用于控制外后视镜进行壳体折叠。
2、但是,更多的电机意味着更复杂的装配流程和更高的工时成本。因此,使用三个电机对外后视镜进行控制可能会出现车辆的制造成本增加、车辆的能耗增加等问题。
技术实现思路
1、本技术提供了一种后视镜的控制方法、装置、车辆和存储介质,该方法能够提高工作效率,减小工作能耗,减少硬件损耗,增加硬件使用寿命。
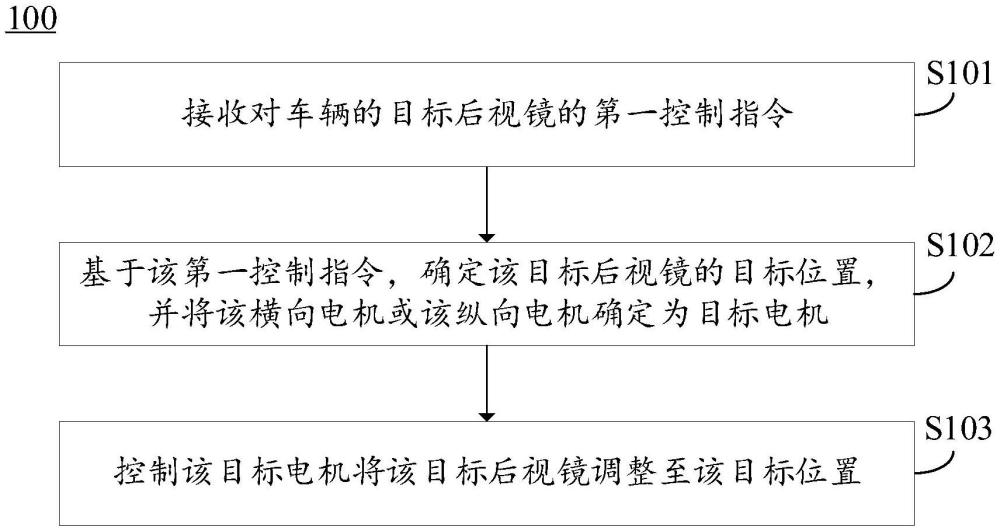
2、第一方面,提供了一种后视镜的控制方法,该方法应用于后视镜的控制系统,该控制系统包括横向电机和纵向电机,该横向电机用于控制该后视镜的壳体折叠或控制该后视镜的镜面横向调整,该纵向电机用于控制该后视镜的镜面纵向调整,该方法包括:接收对车辆的目标后视镜的第一控制指令;基于该第一控制指令,确定该目标后视镜的目标位置,并将该横向电机或该纵向电机确定为目标电机;控制该目标电机将该目标后视镜调整至该目标位置。
3、上述技术方案,在接收到对车辆的目标后视镜的第一控制指令之后,基于该第一控制指令,确定目标后视镜的目标位置,能够快速准确地调整后视镜。并且还可以基于第一控制指令,将该横向电机或该纵向电机确定为目标电机,控制该目标电机将该目标后视镜调整至该目标位置,迅速确定由横向电机还是纵向电机作为目标电机进行动作,通过选择针对性的电机减少了无效动作,提高了电机驱动效率,使得后视镜能在短时间内快速响应控制指令,提升用户体验。并且本方案通过横向电机和纵向电机实现后视镜的壳体折叠、镜面左右调整以及镜面上下调整,相对于传统的三个电机控制后视镜的方案,减少了一个电机的控制,但仍然可以达到三个电机控制后视镜的工作效果,可以提高工作效率,减小工作能耗,减少硬件损耗,增加硬件使用寿命。
4、结合第一方面,在第一方面的某些实现方式中,该目标位置为该目标后视镜的目标机械位置,该目标后视镜包括电位计,该电位计用于协助该控制系统校准该目标后视镜的位置;该控制该目标电机将该目标后视镜调整至该目标位置,包括:基于目标对应关系,确定该目标后视镜的目标机械位置对应的目标软件位置;其中,该目标对应关系包含至少两组后视镜的软件位置与机械位置的对应关系;该软件位置为用于描述该机械位置对应的该电位计的电压参数;向该目标电机发送携带该目标软件位置的第二控制指令,以使该目标电机基于该目标软件位置,将该目标后视镜调整至该目标机械位置。
5、上述技术方案,通过引入目标对应关系,能够将实际的机械位置映射到易于计算机处理的软件位置。这种映射机制能够实现更精细地控制后视镜的移动。同时,如果需要调整后视镜定位的精度或范围,只需修改目标对应关系中的映射,无需改动硬件,增强了系统的灵活性。使用软件位置作为控制信号,使得控制系统的设计更为简洁高效。电机可以直接根据接收到的软件位置执行动作,减少了对物理参数直接解析和控制的复杂性。并且这种方式便于软件编程和调试,降低了系统集成的难度。
6、结合第一方面和上述实现方式,在第一方面的某些实现方式中,该目标对应关系通过以下方式生成:接收到对该后视镜的多个调节指令;对于该多个调节指令中的每个调节指令,将该后视镜调节至与该调节指令对应的机械位置,并获取该机械位置对应的软件位置;基于该机械位置和该机械位置对应的软件位置,生成该目标对应关系。
7、上述技术方案,直接通过实际调节操作来记录机械位置与软件位置的对应关系,确保了映射的准确性。随着调节指令的积累,目标对应关系会越来越完善,用户的每次调节都能更加准确地达到预期位置,减少了用户反复调整的次数,提升了用户体验。在生成目标对应关系的过程中,系统能够检测到异常的机械位置与软件位置对应情况,这为故障诊断提供了数据基础。长期运行中若发现某次调节未能达到预期的机械位置,可以通过比对历史数据进行自我调整或提示用户/技术人员进行检查维修,提升了维护的便捷性。
8、结合第一方面和上述实现方式,在第一方面的某些实现方式中,在该接收对车辆的目标后视镜的第一控制指令之后,该方法还包括:若该第一控制指令为折叠该目标后视镜的壳体的指令,则确定该目标后视镜的目标调整方向为横向调整;若该第一控制指令为左右调整该目标后视镜的镜面的指令,则确定该目标后视镜的目标调整方向为横向调整;若该第一控制指令为上下调整该目标后视镜的镜面的指令,则确定该目标后视镜的目标调整方向为纵向调整。
9、结合第一方面和上述实现方式,在第一方面的某些实现方式中,该将该横向电机或该纵向电机确定为目标电机,包括:在确定该目标调整方向为该横向调整的情况下,将该横向电机确定为该目标电机;在确定该目标调整方向为该纵向调整的情况下,将该纵向电机确定为该目标电机。
10、上述技术方案,先基于接收到的第一控制指令,确定目标后视镜的目标调整方向,然后直接根据目标调整方向(横向或纵向)来确定使用哪个电机进行目标后视镜的调整,避免了不必要的电机激活,从而节省了电力消耗,提高了系统的整体能效。在自动化控制系统中,这种针对性的操作可以减少响应时间,使调整过程更为迅速。通过精确匹配调整需求与电机功能,确保了调整动作的准确性。横向电机专门负责横向移动,纵向电机则专注于纵向移动,这种设计减少了运动误差,提升了定位精度。并且使用横向电机来实现目标后视镜的壳体折叠,无需单独设置一个实现后视镜的壳体折叠的折叠电机,可以有效地减小车辆的工作能耗,减少车辆的硬件损耗。
11、结合第一方面和上述实现方式,在第一方面的某些实现方式中,该方法还包括:在该第一控制指令为折叠该目标后视镜的壳体的指令的情况下,确定调整该目标后视镜的速度为第一速度;在该第一控制指令为左右调整该目标后视镜的镜面的指令或上下调整该目标后视镜的镜面的指令的情况下,确定调整该目标后视镜的速度为第二速度;其中该第一速度大于该第二速度。
12、上述技术方案,在需要折叠目标后视镜的壳体时,以较快的第一速度对目标后视镜进行调整,能够在短时间内完成对目标后视镜的折叠或展开动作,尤其在需要快速通过狭窄空间或停车时,能迅速响应驾驶人员的操作,减少等待时间,提升便捷性。在需要对目标后视镜的镜面进行微调时,以较慢的第二速度对目标后视镜进行调整,有助于驾驶人员更精细地调整后视镜角度,确保视野最佳,提高行车安全。同时确保了调整动作的平滑性和准确性,避免了因速度过快导致的调整过度或不足。通过区分不同操作的速度,可以合理分配电机负载,有利于电机在高负载和频繁操作间取得平衡,避免过热和磨损,从而延长电机及整个后视镜调节系统的使用寿命。
13、结合第一方面和上述实现方式,在第一方面的某些实现方式中,在该第一控制指令为控制该目标后视镜由折叠位置到展开至该目标位置的情况下,该控制该目标电机将该目标后视镜调整至该目标位置,包括:控制该目标电机以该第一速度展开该目标后视镜;在确定该目标后视镜展开至预设位置的情况下,控制该目标电机以该第二速度调整该目标后视镜,直至将该目标后视镜调整至该目标位置;其中,该预设位置为该折叠位置与该目标位置之间的位置,该预设位置与该目标位置之间的距离小于或等于预设距离阈值。
14、上述技术方案,使用较快的第一速度展开后视镜至预设位置,这有助于快速解除折叠状态,迅速恢复后视镜的初步可用性,特别是在紧急需要后视镜视野的场合,如驶出狭窄停车位或在复杂交通环境中行驶时,能够快速响应驾驶员需求,提升行车安全性。当后视镜展开至预设位置后,切换至较慢的第二速度对目标后视镜进行精细调整,直至达到目标位置。分阶段调整速度,避免了电机在展开初期直接以较慢速度承受较大启动扭矩,减少电机和传动机构的磨损,延长了后视镜调节系统的使用寿命。
15、第二方面,提供了一种后视镜的控制装置,该装置应用于后视镜的控制系统,该控制系统包括横向电机和纵向电机,该横向电机用于控制该后视镜壳体折叠或控制该后视镜的镜面横向调整,该纵向电机用于控制该后视镜的镜面纵向调整,该装置包括:接收模块,用于接收到对车辆的目标后视镜的第一控制指令;确定模块,用于基于该第一控制指令,确定该目标后视镜的目标位置,并将该横向电机或该纵向电机确定为目标电机;控制模块,用于控制该目标电机将该目标后视镜调整至该目标位置。
16、结合第二方面,在第二方面的某些实现方式中,该目标位置为该目标后视镜的目标机械位置,该目标后视镜包括电位计,该电位计用于协助该控制系统校准该目标后视镜的位置;该控制模块具体用于:基于目标对应关系,确定该目标后视镜的目标机械位置对应的目标软件位置;其中,该目标对应关系包含至少两组后视镜的软件位置与机械位置的对应关系;该软件位置为用于描述该机械位置对应的该电位计的电压参数;向该目标电机发送携带该目标软件位置的第二控制指令,以使该目标电机基于该目标软件位置,将该目标后视镜调整至该目标机械位置。
17、结合第二方面和上述实现方式,在第二方面的某些实现方式中,该目标对应关系通过以下方式生成:接收到对该后视镜的多个调节指令;对于该多个调节指令中的每个调节指令,将该后视镜调节至与该调节指令对应的机械位置,并获取该机械位置对应的软件位置;基于该机械位置和该机械位置对应的软件位置,生成该目标对应关系。
18、结合第二方面和上述实现方式,在第二方面的某些实现方式中,在该接收对车辆的目标后视镜的第一控制指令之后,该装置还包括第二确定模块,该第二确定模块具体用于:若该第一控制指令为折叠该目标后视镜的壳体的指令,则确定该目标后视镜的目标调整方向为横向调整;若该第一控制指令为左右调整该目标后视镜的镜面的指令,则确定该目标后视镜的目标调整方向为横向调整;若该第一控制指令为上下调整该目标后视镜的镜面的指令,则确定该目标后视镜的目标调整方向为纵向调整。
19、结合第二方面和上述实现方式,在第二方面的某些实现方式中,该确定模块还具体用于:在确定该目标调整方向为该横向调整的情况下,将该横向电机确定为该目标电机;在确定该目标调整方向为该纵向调整的情况下,将该纵向电机确定为该目标电机。
20、结合第二方面和上述实现方式,在第二方面的某些实现方式中,该装置还包括第三确定模块,该第三确定模块具体用于:在该第一控制指令为折叠该目标后视镜的壳体的指令的情况下,确定调整该目标后视镜的速度为第一速度;在该第一控制指令为左右调整该目标后视镜的镜面的指令或上下调整该目标后视镜的镜面的指令的情况下,确定调整该目标后视镜的速度为第二速度;其中该第一速度大于该第二速度。
21、结合第二方面和上述实现方式,在第二方面的某些实现方式中,在该第一控制指令为控制该目标后视镜由折叠位置到展开至该目标位置的情况下,该装置还包括控制模块,该控制模块具体用于:控制该目标电机以该第一速度展开该目标后视镜;在确定该目标后视镜展开至预设位置的情况下,控制该目标电机以该第二速度调整该目标后视镜,直至将该目标后视镜调整至该目标位置;其中,该预设位置为该折叠位置与该目标位置之间的位置,该预设位置与该目标位置之间的距离小于或等于预设距离阈值。
22、第三方面,提供了一种车辆,包括存储器和处理器。该存储器用于存储可执行程序代码,该处理器用于从存储器中调用并运行该可执行程序代码,使得该车辆执行上述第一方面和第一方面任一项可能的实现中的后视镜的控制方法。
23、第四方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面和第一方面任一项可能的实现中的后视镜的控制方法。
24、第五方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面和第一方面任一项可能的实现中的后视镜的控制方法。
- 还没有人留言评论。精彩留言会获得点赞!