车道偏离的控制方法、装置、电子设备、存储介质及车辆与流程
本发明涉及车辆控制,具体涉及一种车道偏离的控制方法、装置、电子设备、存储介质及车辆。
背景技术:
1、汽车四化(即电动化,智能化,网联化,共享化)是汽车行业的发展趋势,智能驾驶是汽车行业智能化的重点之一,而车道偏离是智能驾驶需要解决的技术问题。
2、需要说明的是,车道偏离是指车辆(汽车)在行驶过程中,由于驾驶员的操作失误、注意力不集中、车辆故障或道路条件变化等原因,导致车辆偏离其当前车道。
3、在用户驾驶车辆行驶的过程中,常常发生车道偏离,最终导致交通事故的发生。
技术实现思路
1、本发明的目的之一在于提供一种车道偏离的控制方法,以解决在用户驾驶车辆行驶的过程中,发生车道偏离,导致交通事故的发生的问题;目的之二在于提供一种车道偏离的控制装置;目的之三在于提供一种电子设备;目的之四在于提供一种可读存储介质,目的之五在于提供一种车辆。
2、为了实现上述目的,本发明采用的技术方案如下:
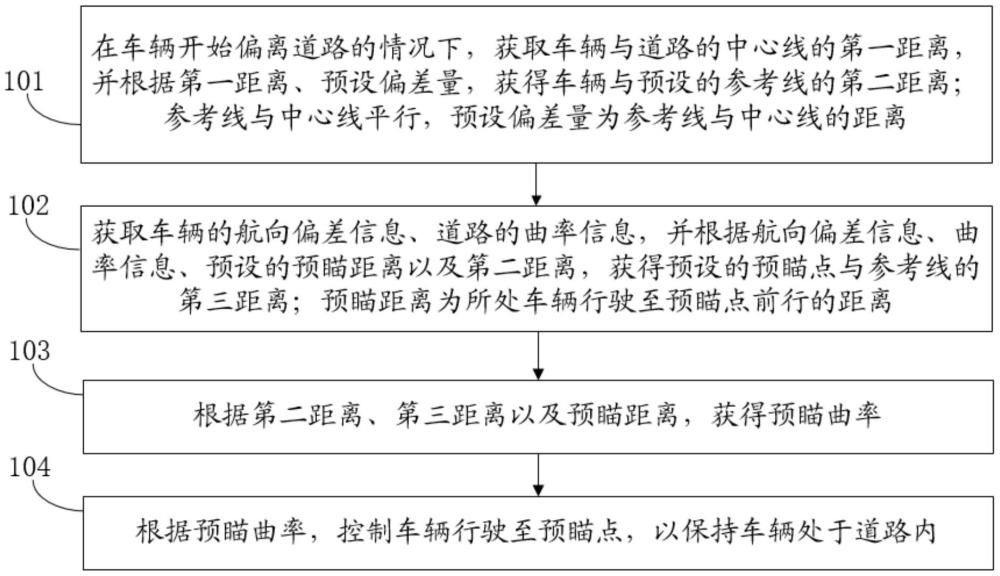
3、一种车道偏离的控制方法,所述方法包括:在车辆开始偏离道路的情况下,获取所述车辆与所述道路的中心线的第一距离,并根据所述第一距离、预设偏差量,获得所述车辆与预设的参考线的第二距离;所述参考线与所述中心线平行,所述预设偏差量为所述参考线与所述中心线的距离;获取所述车辆的航向偏差信息、所述道路的曲率信息,并根据所述航向偏差信息、所述曲率信息、预设的预瞄距离以及所述第二距离,获得预设的预瞄点与所述参考线的第三距离;所述预瞄距离为所述车辆行驶至所述预瞄点前行的距离;根据所述第二距离、所述第三距离以及所述预瞄距离,获得预瞄曲率;根据所述预瞄曲率,控制所述车辆行驶至所述预瞄点,以保持所述车辆处于所述道路内。
4、根据上述技术手段,通过在车辆开始偏离道路的情况下,获取车辆与道路的中心线的第一距离,并根据第一距离、预设偏差量,获得车辆与预设的参考线的第二距离,再获取车辆的航向偏差信息、道路的曲率信息,并根据航向偏差信息、曲率信息、预设的预瞄距离以及第二距离,获得预设的预瞄点与参考线的第三距离,然后根据第二距离、第三距离以及预瞄距离,获得预瞄曲率,再根据预瞄曲率,控制车辆行驶至预瞄点,以保持车辆处于道路内,从而纠正车道偏离,避免了车道偏离导致的交通事故的发生。
5、进一步,所述根据所述第一距离、预设偏差量,获得所述车辆与预设的参考线的第二距离,包括:在第一预设时长内,根据所述第一距离、所述预设偏差量,获得所述第二距离。
6、根据上述技术手段,通过在第一预设时长内,根据第一距离、预设偏差量,获得第二距离,进而在获取车辆的航向偏差信息、道路的曲率信息之后,根据航向偏差信息、曲率信息、预设的预瞄距离以及第二距离,获得预设的预瞄点与参考线的第三距离。
7、进一步,所述方法还包括:根据第一预设时长系数、所述第一预设时长以及预设偏差系数,获得所述预设偏差量;根据所述预设偏差量,确定所述参考线;其中,所述第一预设时长系数与偏离时长为负相关,所述偏离时长为当前时刻与所述车辆开始偏离道路的时刻的差值。
8、根据上述技术手段,通过根据第一预设时长系数、第一预设时长以及预设偏差系数,获得预设偏差量,再根据预设偏差量,确定参考线,从而根据第一距离、预设偏差量,获得车辆与预设的参考线的第二距离。
9、进一步,所述方法还包括:获取所述车辆的车速;将所述车速与第二预设时长相乘,获得所述预瞄距离;根据所述预瞄距离、所述第三距离,确定所述预瞄点。
10、根据上述技术手段,通过获取车辆的车速,再将车速与第二预设时长相乘,获得预瞄距离,然后根据预瞄距离、第三距离,确定预瞄点,从而根据航向偏差信息、曲率信息、预设的预瞄距离以及第二距离,获得预设的预瞄点与参考线的第三距离。
11、进一步,所述根据所述预瞄曲率,控制所述车辆行驶至所述预瞄点,包括:根据所述预瞄曲率,确定所述车辆的方向盘的转动角度;根据所述转动角度,控制所述车辆行驶至所述预瞄点。
12、根据上述技术手段,通过根据预瞄曲率,确定车辆的方向盘的转动角度,再根据转动角度,控制车辆行驶至预瞄点,从而最终实现保持车辆处于道路内。
13、进一步,所述根据所述预瞄曲率,确定所述车辆的方向盘的转动角度,包括:获取所述车辆的车速、传动比以及轴距;根据所述车速、所述传动比、所述轴距、预设稳定性系数以及所述预瞄曲率,获得所述转动角度。
14、根据上述技术手段,通过获取车辆的车速、传动比以及轴距,再根据车速、传动比、轴距、预设稳定性系数以及预瞄曲率,获得转动角度,进而根据转动角度,控制车辆行驶至预瞄点。
15、进一步,所述方法还包括:获取所述车辆的驾驶状态;在所述驾驶状态为所述车辆由用户驾驶、所述车辆的转向灯关闭、所述车辆的方向盘转动且所述车辆的加速度处于预设加速度范围的情况下,获取所述车辆的车道状态;在所述车道状态为所述车辆与所述道路的参考边界的距离小于预设阈值的情况下,确定所述车辆开始偏离所述道路。
16、根据上述技术手段,通过获取车辆的驾驶状态,再在驾驶状态为车辆由用户驾驶、车辆的转向灯关闭、车辆的方向盘转动且车辆的加速度处于预设加速度范围的情况下,获取车辆的车道状态,然后在车道状态为车辆与道路的参考边界的距离小于预设阈值的情况下,确定车辆开始偏离道路,进而在车辆开始偏离道路的情况下,进行车道偏离的纠正。
17、进一步,所述方法还包括:获取所述车辆的前行方向与所述中心线之间的夹角,并将所述夹角作为所述航向偏差信息。
18、根据上述技术手段,通过获取车辆的前行方向与中心线之间的夹角,并将夹角作为航向偏差信息,进而根据航向偏差信息、曲率信息、预设的预瞄距离以及第二距离,获得预设的预瞄点与参考线的第三距离。
19、进一步,所述道路的曲率信息包括所述中心线的曲率、所述中心线的曲率变化率。
20、根据上述技术手段,通过根据航向偏差信息、中心线的曲率、中心线的曲率变化率、预设的预瞄距离以及第二距离,获得预设的预瞄点与参考线的第三距离,进而根据第二距离、第三距离以及预瞄距离,获得预瞄曲率。
21、一种车道偏离的控制装置,所述装置包括:第一获取模块,用于在车辆开始偏离道路的情况下,获取所述车辆与所述道路的中心线的第一距离,并根据所述第一距离、预设偏差量,获得所述车辆与预设的参考线的第二距离;所述参考线与所述中心线平行,所述预设偏差量为所述参考线与所述中心线的距离;第二获取模块,用于获取所述车辆的航向偏差信息、所述道路的曲率信息,并根据所述航向偏差信息、所述曲率信息、预设的预瞄距离以及所述第二距离,获得预设的预瞄点与所述参考线的第三距离;所述预瞄距离为所述车辆行驶至所述预瞄点前行的距离;第三获取模块,用于根据所述第二距离、所述第三距离以及所述预瞄距离,获得预瞄曲率;控制模块,用于根据所述预瞄曲率,控制所述车辆行驶至所述预瞄点,以保持所述车辆处于所述道路内。
22、一种电子设备,包括处理器,存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如上述的车道偏离的控制方法的步骤。
23、一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如上述的车道偏离的控制方法的步骤。
24、一种车辆,包括如上述的车道偏离的控制装置。
25、本发明的有益效果:
26、在本技术实施例中,通过在车辆开始偏离道路的情况下,获取车辆与道路的中心线的第一距离,并根据第一距离、预设偏差量,获得车辆与预设的参考线的第二距离,再获取车辆的航向偏差信息、道路的曲率信息,并根据航向偏差信息、曲率信息、预设的预瞄距离以及第二距离,获得预设的预瞄点与参考线的第三距离,然后根据第二距离、第三距离以及预瞄距离,获得预瞄曲率,再根据预瞄曲率,控制车辆行驶至预瞄点,以保持车辆处于道路内,从而纠正车道偏离,避免了车道偏离导致的交通事故的发生,解决了在用户驾驶车辆行驶的过程中,发生车道偏离,导致交通事故的发生的问题。
- 还没有人留言评论。精彩留言会获得点赞!