门模块电路、总线信号值传输方法和存储介质与流程
本发明涉及电路领域,尤其是涉及一种门模块电路、总线信号值传输方法和存储介质。
背景技术:
1、在车辆驾驶领域中,为驾驶安全需要对后视镜位置角度进行调整,通过调节后视镜镜面角度来实现,一般后视镜镜面角度调节的精度要求为0.1°。后视镜出厂时位置角度为90°,后视镜镜面调节角度范围为16°,转换成物理角度范围在82°~90°之间。在对后视镜位置角度调节过程中,后视镜镜面的位置信息需要通过总线信号发送到can网络上,如果每发生0.1°的变化就发送一个总线报文值,则对82°~90°范围的角度调节,则需要至少160个总线报文值。
2、然而目前,传输的总线信号长度为8bit,可表示的值的范围在0~255之间,信号报文值范围大于所要用到的范围(160个报文值),即总线信号长度范围远小于adc采样芯片的精度,因此无法实现对于0.1°精度的位置反馈,进而无法对后视镜位置角度做精确调节。
技术实现思路
1、有鉴于此,本发明提供了一种门模块电路、总线信号值传输方法和存储介质,以实现对后视镜位置角度精确调节。
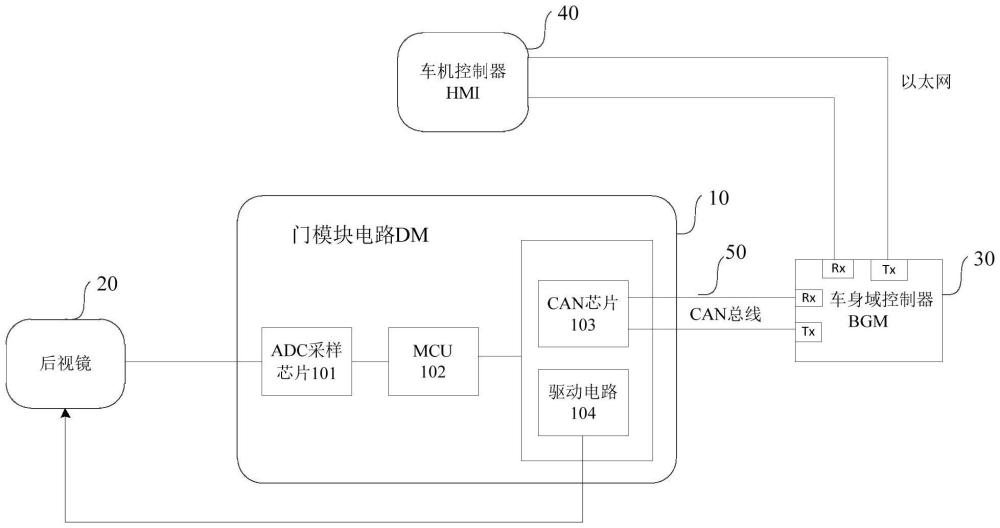
2、第一方面,本发明提供了一种门模块电路,该门模块电路包括adc采样芯片、微控制单元mcu和can芯片,其中,
3、adc采样芯片,用于采集车辆后视镜在当前第一角度位置所对应的电压值,并将所述电压值输出给所述mcu;
4、mcu,用于接收所述电压值,根据预设对应关系查找与所述电压值对应的总线信号值,并将所述总线信号值传输至所述can芯片,其中,预设对应关系为adc采样芯片的精度范围与can总线传输范围的n个总线信号值之间的对应关系,所述n个总线信号值由后视镜角度位置可调范围确定,n≥1且为正整数;
5、can芯片,用于接收所述总线信号值,并将所述总线信号值通过第一can报文发送给车机控制器,以使所述车机控制器根据所述第一can报文调节所述后视镜的角度位置。
6、结合第一方面,在一种可能的实施方式中,mcu还用于在查找与电压值对应的总线信号值之前,获取所述预设对应关系;
7、mcu获取所述预设对应关系,包括:
8、mcu获取所述adc采样芯片的精度范围包含的m个adc逻辑值,所述n个总线信号值,以及所述后视镜角度位置可调范围,m≥n且m为正整数;
9、mcu根据can总线传输特性,将所述n个总线信号值划分为多个信号值区间,并将所述m个adc逻辑值映射到所述多个信号值区间,生成所述预设对应关系。
10、结合第一方面,在另一种可能的实施方式中,所述mcu将所述m个adc逻辑值映射到所述多个信号值区间,包括:获取所述后视镜在中心角度位置所对应的中心电压值,建立所述中心电压值与总线信号标定值之间的映射关系,所述总线信号标定值是所述n个总线信号值之一。
11、结合第一方面,在又一种可能的实施方式中,所述n个总线信号值的最小值为最小信号值,最大值为最大信号值;所述mcu将所述m个adc逻辑值映射到所述多个信号值区间,包括:
12、获取所述adc采样芯片采集的当前电压值;若所述当前电压值小于所述最小信号值,则建立所述当前电压值与所述最小信号值之间的映射关系;若所述当前电压值大于所述最大信号值,则建立所述当前电压值与所述最大信号值之间的映射关系。
13、结合第一方面,在又一种可能的实施方式中,所述n个总线信号值包括第一信号阈值y1、第二信号阈值y2和第三信号阈值y3,且y1<y2<y3,且所述第一信号阈值y1大于最小信号值ymin,所述第三信号阈值y3小于最大信号值ymax;
14、所述mcu将所述m个adc逻辑值映射到所述多个信号值区间,还包括:
15、所述mcu将所述数量为m1至m4的4组adc逻辑值映射到4个信号值区间上,其中m1+m2+m3+m4=m,所述映射关系包括:
16、所述m1个adc逻辑值映射到第一信号区间,所述第一信号区间为[ymin,y1);
17、所述m2个adc逻辑值映射到第二信号区间,所述第二信号区间为[y1,y2];
18、所述m3个adc逻辑值映射到第三信号区间,所述第三信号区间为(y2,y3];
19、所述m4个adc逻辑值映射到第四信号区间,所述第四信号区间为(y3,ymax]。
20、结合第一方面,在又一种可能的实施方式中,adc采样芯片具体用于将采集的所述当前角度位置所对应的电压值转换为数字信号,发送所述电压值对应的数字信号给所述mcu。
21、结合第一方面,在又一种可能的实施方式中,所述门模块电路还包括驱动电路,驱动电路与mcu和后视镜相连接;
22、can芯片还用于接收所述车机控制器根据所述第一can报文反馈的第二can报文,所述第二can报文中携带用于指示调节所述后视镜角度位置的指示信息;
23、mcu还用于接收所述can芯片转发的所述第二can报文,并解析第二can报文得到所述指示信息,并根据所述指示信息生成控制指令,以及将控制指令发送给驱动电路。
24、驱动电路用于接收所述控制指令,并驱动所述后视镜从所述第一角度位置调节至第二角度位置。
25、第二方面,本发明提供了一种总线信号值传输方法,所述方法包括:
26、微控制单元mcu接收adc采样芯片发送的电压值,所述电压值为车辆后视镜在当前第一角度位置所对应的电压值;
27、mcu根据预设对应关系查找与所述电压值对应的总线信号值,所述预设对应关系为adc采样芯片的精度范围与can总线传输范围的n个总线信号值之间的对应关系,所述n个总线信号值由后视镜角度位置可调范围确定,n≥1且为正整数;
28、mcu将所述总线信号值传输至can芯片,以使所述can芯片将所述总线信号值通过第一can报文发送给车机控制器。
29、结合第二方面,在一种可能的实施方式中,所述方法包括:
30、mcu获取所述adc采样芯片的精度范围包含的m个adc逻辑值,所述n个总线信号值,以及所述后视镜角度位置可调范围,m≥n且m为正整数;
31、mcu根据can总线传输特性,将所述n个总线信号值划分为多个信号值区间,并将所述m个adc逻辑值映射到所述多个信号值区间,生成所述预设对应关系。
32、结合第二方面,在另一种可能的实施方式中,所述方法包括:
33、mcu接收所述can芯片转发的所述第二can报文,所述第二can报文中携带用于指示调节所述后视镜角度位置的指示信息;
34、mcu解析所述第二can报文得到所述指示信息,并根据所述指示信息生成控制指令;
35、mcu将所述控制指令发送给所述驱动电路,所述控制指令用于控制所述驱动电路驱动所述后视镜从所述第一角度位置调节至第二角度位置。
36、第三方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第二方面或其对应的任一实施方式的总线信号值传输方法。
37、此外,本发明还提供一种计算机程序产品,包括计算机程序指令,其特征在于,当所述计算机程序指令处理器被执行时,实现上述第二方面或其对应的任一实施方式的总线信号值传输方法。
38、本实施例提供的门模块电路、总线信号值传输方法,在mcu侧预先建立并存储adc逻辑值与总线信号值之间的对应关系,当接收到来自adc采样芯片发送的一个adc逻辑值时,根据该对应关系可以找到相对应的总线信号值,由于该对应关系在建立时满足对后视镜角度位置达到0.1°精度的关系映射,所以实现对后视镜位置角度做精确调节,且无需更换adc采样芯片,进而也无需更换门模块电路。
- 还没有人留言评论。精彩留言会获得点赞!