一种汽车急刹车控制方法及其设备与流程
本发明属于车辆制动控制系统,更具体地说,涉及一种汽车急刹车控制方法及其设备。
背景技术:
1、用户在驾驶车辆的过程中,会主动观察前方的车辆,看是否有急刹车辆,以及时做出反应避免追尾急刹车辆;类似的,在自动驾驶场景中,自动驾驶车辆在行驶过程中,也需要确定周围的车辆中是否有急刹车辆,以及时执行相应的操作避免追尾。
2、在用户主动驾驶车辆的过程中,当遇到需要急刹车的情况时,可能出现用户疲劳驾驶或注意力不集中而错过最佳踩下刹车的时机,导致允许行驶距离小于制动距离的情况,此时即使再踩下刹车也无法避免事故产生;
3、为了避免上述事故的发生,自动驾驶系统具有及时检测车况路况,以在需要刹车的情况下及时发出刹车指令的功能;但是现有的自动驾驶系统中,在关于紧急刹车的控制方法方面执行并不完美,一方面,在面对车辆强行加塞、行人突然出现等情况时,不能实现立刻刹停,从而导致并不能完全避免事故的发生,当车辆行驶速度快时,仍然会带来危及生命安全的事故;另一方面,部分自动驾驶系统为了确保行车安全,在会频繁下达急刹车指令,一旦出现意外情况车辆就会执行急刹车,这虽然提高了车辆行驶的安全性,但是频繁的急刹车会大大影响了用户的坐车体验,更严重者还会出现晕车、呕吐等情况,严重损害了坐车的舒适度。
技术实现思路
1、本发明要解决的技术问题在于提供一种汽车急刹车控制方法及其设备,它可以实现在紧急情况下制动时间和制动距离短,以适应各种情况下的紧急情况,确保车辆行驶安全。
2、本发明的一种汽车急刹车控制方法,
3、监测模块,以实时监测车辆当前车道和附近车道上的实况,包括车辆行驶状况和行人经过状况;
4、判断模块,根据监测模块所监测到的信息判断刹车系统;
5、刹车系统包括独立于原刹车助力系统的第二刹车助力系统;
6、监测模块监测车辆在出现障碍物预碰撞情形下;启动判断模块进行计算判断,触发条件如下:
7、a1:在障碍物进入的可能碰撞的预警距离内,但未监测到原刹车助力系统有信号,判断模块根据障碍物和本车之间的距离进入小于第二刹车助力系统的第一极限刹车距离和预留阈值总和,触发第二刹车助力系统启动瞬时输出动力单元刹死刹车系统;
8、a2:在障碍物进入的可能碰撞的预警距离内,但监测到原刹车助力系统有信号,但当车辆减速度至零的模拟计算的刹车距离小于第二刹车助力系统的第一极限刹车距离和预留阈值总和时,判断模块输出信号至第二控制单元;触发第二刹车助力系统启动瞬时输出动力单元刹死刹车系统;
9、a3:在障碍物出现的距离直接小于第一极限刹车距离和预留阈值总和,直接触发第二刹车助力系统启动瞬时输出动力单元刹死刹车系统。
10、作为本发明的进一步改进,原刹车助力系统通过伺服电机驱动,在所述推杆长度方向上设有通过伺服电机驱动传动装置以驱使前进的丝杆;
11、所述第二刹车助力系统包括瞬时输出动力单元、与刹车总泵输入端推杆连接的连接单元和第二控制单元;所述第二刹车助力系统通过第二控制单元独立地驱动瞬时输出动力单元;
12、所述连接单元的一端部设置于丝杆与推杆之间,所述连接单元的另一端部与瞬时输出动力单元的输出端连接,以使该端部受瞬时输出动力单元驱动后,所述连接单元运动以将推杆瞬时推向刹车总泵;所述连接单元设置于丝杆和推杆的一侧,且运动方向与推杆长度方向一致,以使瞬时输出动力单元设置于伺服电机后部的空位为其唯一设置位置;
13、满足所述触发条件后,第二刹车助力系统通过刹车瞬时输出动力单元驱动连接单元,推动推杆完成刹车。
14、作为本发明的进一步改进,第二刹车助力系统的所述连接单元是推动架;推动架为两端部分别朝相反方向弯折的z型架;推动架包括第一推动部、滑动导向部和第二推动部;第一推动部抵接于推杆和原刹车助力系统的输出端之间,第二推动部连接所述瞬时输出动力单元的输出端,以使推动架在所述瞬时输出动力单元的控制下具有将推杆推向刹车总泵的能力。
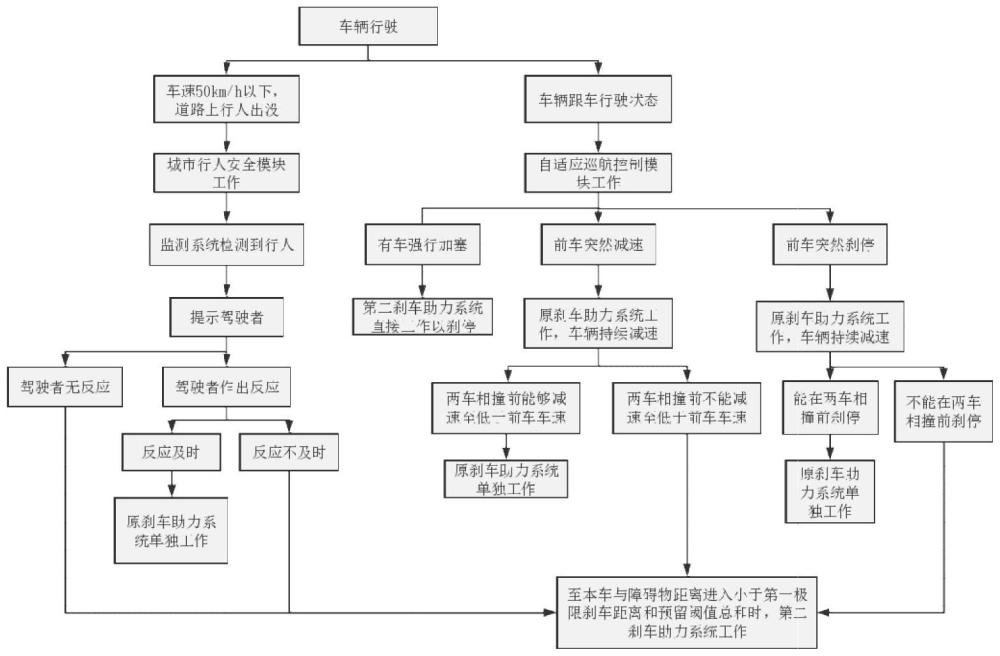
15、作为本发明的进一步改进,障碍物包括同车道且位于前侧的汽车和本车车速在50km/h的以内时的行人;
16、所述本车车速在50km/h的以内时的行人的防碰撞安全模块定义为城市行人安全模块;城市行人安全模块根据所述监测到的信息判断车辆在面对有行人经过时的刹车方式,以确保车辆与行人之间的行驶安全;
17、同车道且位于前侧的汽车通过自适应巡航实时监测,定义为自适应巡航控制模块;自适应巡航控制模块用于车辆跟车行驶过程中,自适应巡航控制模块根据所述监测到的前车的行驶信息判断需要刹车时的刹车方式;
18、所述刹车方式包括:通过原刹车助力系统完成刹车、通过第二刹车助力系统完成刹车、通过原刹车助力系统和第二刹车助力系统共同工作完成刹车。
19、作为本发明的进一步改进,通过原刹车助力系统和第二刹车助力系统共同工作完成刹车包括以下步骤:
20、原刹车助力系统产生信号并工作,车辆持续减速,监测模块持续监测车辆与障碍物之间的距离;
21、当判断模块对车辆减速度至零的模拟计算的刹车距离小于第二刹车助力系统的第一极限刹车距离和预留阈值总和时,判断模块输出信号至第二控制单元;触发第二刹车助力系统启动瞬时输出动力单元刹死刹车系统。
22、作为本发明的进一步改进,第二刹车助力系统工作后,急刹卡钳与刹车卡钳同时作用于刹车盘,以实现刹车盘止转。
23、作为本发明的进一步改进,城市行人安全模块的工作方法包括:
24、监测模块监测到可能碰撞的预警距离内有行人穿行;
25、城市行人安全模块向驾驶者发出警报预警;
26、若驾驶者看到警报后反应及时,以使原刹车助力系统单独工作下,车辆减速度至零的模拟计算的刹车距离小于车辆与行人之间的距离,则刹车方式为通过原刹车助力系统完成刹车;
27、若驾驶者看到警报后反应不及时,以使原刹车助力系统单独工作下,车辆减速度至零的模拟计算的刹车距离大于车辆与行人之间的距离,则刹车方式为通过原刹车助力系统和第二刹车助力系统共同工作完成刹车;
28、若驾驶者看到警报后没反应,则刹车方式为通过第二刹车助力系统完成刹车。
29、作为本发明的进一步改进,自适应巡航控制模块用于前车突然刹停的工作方法包括:
30、监测模块持续监测两车之间的距离;
31、自适应巡航控制模块监测到原刹车助力系统工作,且原刹车助力系统单独工作下车辆减速度至零的模拟计算的刹车距离小于两车之间的距离,则刹车方式为通过原刹车助力系统完成刹车;
32、自适应巡航控制模块监测到原刹车助力系统工作,但原刹车助力系统单独工作下车辆减速度至零的模拟计算的刹车距离大于两车之间的距离,则刹车方式为通过原刹车助力系统和第二刹车助力系统共同工作完成刹车;
33、自适应巡航控制模块监测到原刹车助力系统不工作,则刹车方式为通过第二刹车助力系统完成刹车。
34、作为本发明的进一步改进,自适应巡航控制模块用于前车突然减速的工作方法包括:
35、监测模块持续监测两车之间的距离;
36、自适应巡航控制模块计算本车能否在两车相撞前减速至车速低于前车车速,若可以,则持续减速至车速低于前车车速后保持车速行驶,直至监测模块检测到两车之间的距离等于或大于安全行车距离,本车可调整车速;
37、若不可以,通过第二刹车助力系统介入共同工作完成刹车。
38、作为本发明的进一步改进,自适应巡航控制模块用于前方突然加塞的工作方法包括:当监测模块检测到有车辆加塞时,刹车方式为通过第二刹车助力系统完成刹车,以直接触发第二刹车助力系统启动瞬时输出动力单元刹死刹车系统。
39、作为本发明的进一步改进,判断模块还包括安全检查模块;安全检查模块于车辆起步和停车完成前工作;
40、安全检查模块的工作方法包括:车辆起步和停车完成前,安全检查模块向第二控制单元发送信号,以驱使瞬时输出动力单元驱动连接单元,以推动推杆控制刹车总泵工作;若安全检查模块检测到刹车总泵工作的信号,则证明第二刹车助力系统完好;若安全检查模块未检测到刹车总泵工作的信号,则证明第二刹车助力系统损坏,安全检查模块输出警报。
41、一种汽车急刹车的设备,为用于一种汽车急刹车控制方法的设备,所述瞬时输出动力单元是电磁阀或液压缸;刹车总泵连接有刹车卡钳,刹车卡钳与对应的刹车盘连接,以用于刹车盘的止转;每个刹车盘的外周还设置有急刹卡钳;急刹卡钳与刹车卡钳相对设置,以使急刹卡钳与刹车卡钳同时作用于刹车盘,以使刹车盘快速止转。
42、作为本发明的进一步改进,所述设备还包括导向芯;导向芯固定设置于推杆的外侧且平行,导向芯与推动架的滑动导向部滑动连接,以为推动架在推杆长度方向上的运动提供导向作用。
43、作为本发明的进一步改进,电磁阀和原刹车助力系统的电机沿推杆的长度方向排布,以使电磁阀设置于所述电机的后部的空位;电磁阀的输出端的输出方向与将推杆推向刹车总泵的力的方向相同;导向芯朝远离踏板的方向延伸,以使导向芯的长度范围内至少包括电磁阀和电磁阀输出端的部分输出范围。
44、作为本发明的进一步改进,推动架为两端部分别朝相反方向弯折的z型架;推动架与推杆抵接的第一推动部朝推杆倾斜a°设置,第一推动部朝推杆与导向芯轴线的垂直线的夹角为a°角,a°的度数在2°~5°之间;推动架的第二推动部朝电磁阀倾斜b°设置;第二推动部与导向芯轴线的垂直线的夹角为b°角,b°的度数在2°~5°之间。
45、相比于现有技术,本发明的有益效果在于:
46、(1)本发明记载的一种汽车急刹车控制方法所用到的第二刹车助力系统,具有瞬时输出动力单元,相较于原刹车助力系统,能够做到刹车响应更快,刹车效率更高,能够做到瞬时刹停车辆,以达到急刹车的效果;且通过判断车辆的刹车距离与第一极限刹车距离和预留阈值总和之间的关系,实现在紧急情况下刹停车辆,以保证车内人员的安全和车辆的行驶安全;
47、(2)原刹车助力系统和第二刹车助力系统的共同作用下,在第二刹车助力系统工作前,由原刹车助力系统进行车辆减速,以实现在刹车前进行缓冲,尽可能地降低车辆急刹车之前的车速,一方面降低急刹车对车辆带来的冲击力和损耗,提高了车辆的使用寿命,对车辆起到保护作用;另一方面车辆急刹车时的行驶速度越快,车辆的惯性越大,急刹时车辆产生的震动也越大,因此还能够最大限度地避免车辆的震动,尽可能地降低急刹车对乘车人员带来的不适感,提高了乘车人员的乘车体验;
48、(3)连接单元用于连接瞬时输出动力单元和推杆,使得瞬时输出动力单元驱动下的连接单元能够瞬时将推杆推向刹车总泵,在连接单元的设置下,瞬时输出动力单元设置于伺服电机后部的空位为其唯一设置位置;一方面,瞬时输出动力单元设置于伺服电机后部的空位符合紧凑性原则,另一方面,第二刹车助力系统独立于原刹车助力系统工作,但部分或全部设置于原刹车助力系统内,使得该设备的加入只需要在原有刹车助力系统的长度方向上的尺寸发生变化,有利于车辆的优化和更新换代;且内部结构变化小,只需改变部分零件的尺寸即可实现,无需大量的新模具的设计和制造,降低了生产成本;
49、(4)判断模块控制下的原刹车助力系统和第二刹车助力系统的工作使得车辆行驶过程中的刹车更加灵活,使得意外情况发生时,原有刹车曲线不足以刹停或刹车制动力不足导致刹车困难的情况得到了完美解决,确保了行车安全,大大提高了车辆行驶的安全性;
50、(5)第二刹车助力系统的工作的情况下,由于电磁阀工作时连接的电流越大,电磁阀的输出越大,推杆被推向刹车总泵的速度越快,因此只要提供足够大的电流,刹车总泵就可以做到接近瞬时驱动,这将会大大提高刹车的效率,避免了现有技术和原刹车系统中由于制动时间过长、制动距离过远导致大量的安全事故无法避免的情况,能够更有效地减少事故的发生,保证了用户的行车安全;
51、(6)由于长时间使用下,电磁阀的输出端施加于推动架的力会推动其端部朝远离电磁阀的方向倾斜形变,同理,推动架的另一端也会朝远离推杆的方向倾斜形变,从而影响推动架的使用效果,因此推动架的两个端部的倾斜设置在一定程度上减慢了这种形变的发生,在避免形变影响工作效率的同时,延长了使用寿命;
52、(7)当原刹车助力系统单独工作时,第二刹车助力系统不工作,无需耗费能源,因此本发明的设计不会在原有的基础上增加大量能耗,符合节能原则。
- 还没有人留言评论。精彩留言会获得点赞!