一种车辆高度控制方法、装置、设备及存储介质与流程
本技术涉及车辆控制,特别是涉及一种车辆高度控制方法、装置、设备及存储介质。
背景技术:
1、空气悬架系统(ecas),主要由控制器、电磁阀、高度传感器、气囊等部件组成,可以用于控制车辆的高度。其基本工作原理是高度传感器将检测到的车辆高度信息发送至控制器,控制器基于车辆的高度信息,控制电磁阀工作,以对各个气囊的充放气调节,实现对车辆高度的控制。
2、然而当车辆行驶到不平坦的路面时,由于车轮处于顶起或者悬空状态,使得车身高度异常,会导致ecas持续充气或排气,可能引起电磁阀故障;同时当车辆行驶于比利时路面时,由于车身高度的反复升高或者降低,会导致ecas频繁调节,减少使用寿命。
3、因此,亟需一种方案,能够解决上述问题。
技术实现思路
1、基于上述问题,本技术提供了一种车辆高度控制方法、装置、设备及存储介质。
2、本技术实施例公开了如下技术方案:
3、第一方面:本技术实施例提供一种车辆高度控制方法,包括:
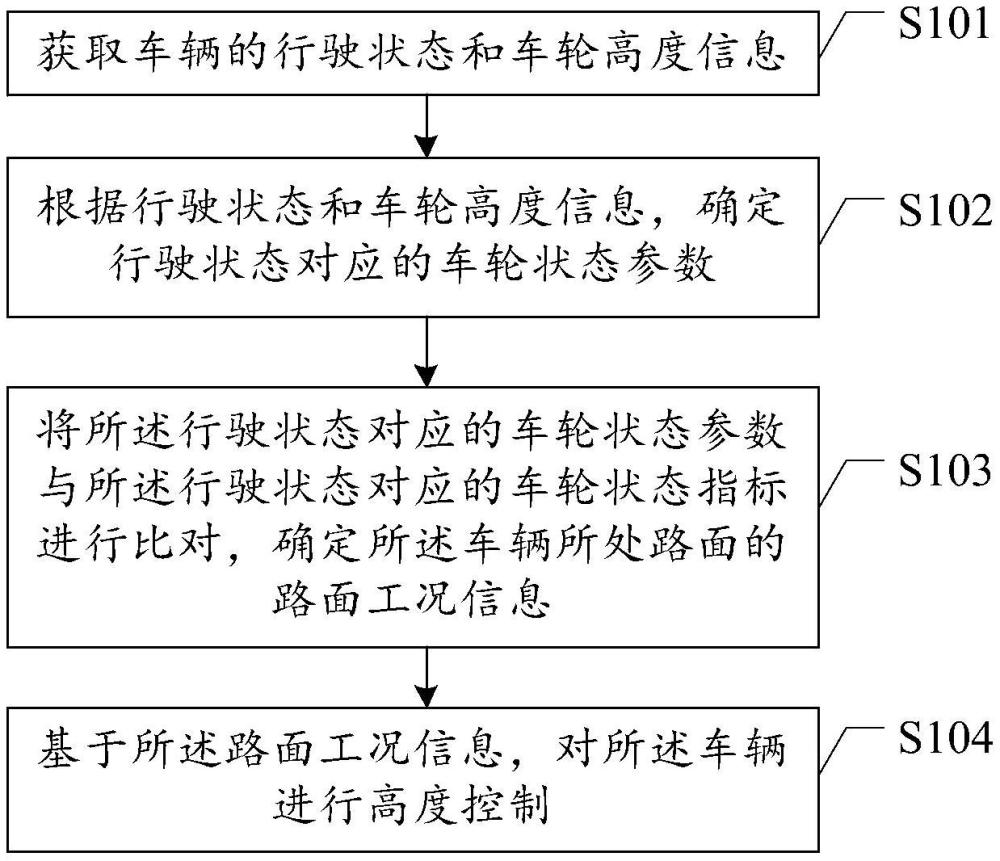
4、获取车辆的行驶状态和车轮高度信息,所述行驶状态包括静止状态和运动状态,所述车轮高度信息包括左前方车轮的高度值、右前方车轮的高度值、左后方车轮的高度值和右后方车轮的高度值;
5、根据所述行驶状态和车轮高度信息,确定所述行驶状态对应的车轮状态参数,所述静止状态对应的车轮状态参数为车轮的对角高度差值,所述运动状态对应的车轮状态参数为车轮的轮跳值;
6、将所述行驶状态对应的车轮状态参数与所述行驶状态对应的车轮状态指标进行比对,确定所述车辆所处路面的路面工况信息;
7、基于所述路面工况信息,对所述车辆进行高度控制。
8、在一种可能的实现方式中,所述行驶状态为静止状态,所述根据所述行驶状态和车轮高度信息,确定所述行驶状态对应的车轮状态参数,包括:
9、根据所述行驶状态和车轮高度信息,计算左前方车轮的高度值与右前方车轮的高度值之和,得到前方车轮高度值;并计算左后方车轮的高度值与右后方车轮的高度值之和,得到后方车轮高度值;
10、计算前方车轮高度值与后方车轮高度值之间的差值,得到车轮的对角高度差值。
11、在一种可能的实现方式中,所述将所述行驶状态对应的车轮状态参数与所述行驶状态对应的车轮状态指标进行比对,确定所述车辆所处路面的路面工况信息,包括:
12、当车轮的对角高度差值小于第一差值时,确定所述车辆所处路面的路面工况信息为平地工况;
13、当车轮的对角高度差值大于第二差值时,确定所述车辆所处路面的路面工况信息为大路肩工况,所述第二差值大于所述第一差值;
14、当车轮的对角高度差值大于或等于第一差值,且小于或等于第二差值,确定所述车辆所处路面的路面工况信息为小路肩工况。
15、在一种可能的实现方式中,所述基于所述路面工况信息,对所述车辆进行高度控制,包括:
16、当确定所述车辆所处路面的路面工况信息为平地工况时,基于平地工况,控制空气悬架系统,对各个车轮的高度进行独立的调节;
17、当确定所述车辆所处路面的路面工况信息为大路肩工况时,基于大路肩工况,控制空气悬架系统,禁止对车轮进行高度调节;
18、当确定所述车辆所处路面的路面工况信息为小路肩工况时,基于小路肩工况,控制空气悬架系统,按照车轮的前轴平均高度,以及后轴平均高度,对车轮进行高度调节。
19、在一种可能的实现方式中,所述行驶状态为运动状态,所述根据所述行驶状态和车轮高度信息,确定所述行驶状态对应的车轮状态参数,包括:
20、根据所述行驶状态和车轮高度信息,计算左前方车轮的高度值与左前方车轮的初始高度值之间的差值,得到左前方车轮的轮跳值;和/或,
21、计算右前方车轮的高度值与右前方车轮的初始高度值之间的差值,得到右前方车轮的轮跳值;
22、将所述左前方车轮的轮跳值和所述右前方车轮的轮跳值中的至少一个,确定为所述车轮的轮跳值。
23、在一种可能的实现方式中,所述将所述行驶状态对应的车轮状态参数与所述行驶状态对应的车轮状态指标进行比对,确定所述车辆所处路面的路面工况信息,包括:
24、当在第一预设时段内,车轮的轮跳值大于第一轮跳阈值,且在第二预设时段内,所述车轮的轮跳值小于第二轮跳阈值,且在第三预设时段内,车轮的轮跳值大于第三轮跳阈值,确定所述车辆所处路面的路面工况信息为比利时路工况,所述第二预设时段的起始时刻为所述第一预设时段的结束时刻,所述第三预设时段的起始时刻为所述第二预设时段的结束时刻。
25、在一种可能的实现方式中,所述基于所述路面工况信息,对所述车辆进行高度控制,包括:
26、当确定所述车辆所处路面的路面工况信息为比利时路工况时,基于比利时路工况,控制空气悬架系统,禁止对车轮进行高度调节。
27、第二方面:本技术实施例提供一种车辆高度控制装置,包括:
28、获取单元、确定单元、比对单元和控制单元;
29、所述获取单元,用于获取车辆的行驶状态和车轮高度信息,所述行驶状态包括静止状态和运动状态,所述车轮高度信息包括左前方车轮的高度值、右前方车轮的高度值、左后方车轮的高度值和右后方车轮的高度值;
30、所述确定单元,用于根据所述行驶状态和车轮高度信息,确定所述行驶状态对应的车轮状态参数,所述静止状态对应的车轮状态参数为车轮的对角高度差值,所述运动状态对应的车轮状态参数为车轮的轮跳值;
31、所述比对单元,用于将所述行驶状态对应的车轮状态参数与所述行驶状态对应的车轮状态指标进行比对,确定所述车辆所处路面的路面工况信息;
32、所述控制单元,用于基于所述路面工况信息,对所述车辆进行高度控制。
33、在一种可能的实现方式中,所述行驶状态为静止状态,所述确定单元,包括:第一计算单元和第二计算单元;
34、所述第一计算单元,用于根据所述行驶状态和车轮高度信息,计算左前方车轮的高度值与右前方车轮的高度值之和,得到前方车轮高度值;并计算左后方车轮的高度值与右后方车轮的高度值之和,得到后方车轮高度值;
35、所述第二计算单元,用于计算前方车轮高度值与后方车轮高度值之间的差值,得到车轮的对角高度差值。
36、在一种可能的实现方式中,所述比对单元,包括:
37、第一确定子单元、第二确定子单元和第三确定子单元;
38、所述第一确定子单元,用于当车轮的对角高度差值小于第一差值时,确定所述车辆所处路面的路面工况信息为平地工况;
39、所述第二确定子单元,用于当车轮的对角高度差值大于第二差值时,确定所述车辆所处路面的路面工况信息为大路肩工况,所述第二差值大于所述第一差值;
40、所述第三确定子单元,用于当车轮的对角高度差值大于或等于第一差值,且小于或等于第二差值,确定所述车辆所处路面的路面工况信息为小路肩工况。
41、在一种可能的实现方式中,所述控制单元,包括:
42、第一子控制单元、第二子控制单元和第三子控制单元;
43、所述第一子控制单元,用于当确定所述车辆所处路面的路面工况信息为平地工况时,基于平地工况,控制空气悬架系统,对各个车轮的高度进行独立的调节;
44、所述第二子控制单元,用于当确定所述车辆所处路面的路面工况信息为大路肩工况时,基于大路肩工况,控制空气悬架系统,禁止对车轮进行高度调节;
45、所述第三子控制单元,用于当确定所述车辆所处路面的路面工况信息为小路肩工况时,基于小路肩工况,控制空气悬架系统,按照车轮的前轴平均高度,以及后轴平均高度,对车轮进行高度调节。
46、在一种可能的实现方式中,所述行驶状态为运动状态,所述确定单元,包括:第三计算单元、第四计算单元和第四确定子单元;
47、所述第三计算单元,用于根据所述行驶状态和车轮高度信息,计算左前方车轮的高度值与左前方车轮的初始高度值之间的差值,得到左前方车轮的轮跳值;和/或,
48、所述第四计算单元,用于计算右前方车轮的高度值与右前方车轮的初始高度值之间的差值,得到右前方车轮的轮跳值;
49、所述第四确定子单元,用于将所述左前方车轮的轮跳值和所述右前方车轮的轮跳值中的至少一个,确定为所述车轮的轮跳值。
50、在一种可能的实现方式中,所述比对单元,具体用于:
51、当在第一预设时段内,车轮的轮跳值大于第一轮跳阈值,且在第二预设时段内,所述车轮的轮跳值小于第二轮跳阈值,且在第三预设时段内,车轮的轮跳值大于第三轮跳阈值,确定所述车辆所处路面的路面工况信息为比利时路工况,所述第二预设时段的起始时刻为所述第一预设时段的结束时刻,所述第三预设时段的起始时刻为所述第二预设时段的结束时刻。
52、在一种可能的实现方式中,所述控制单元,具体用于:
53、当确定所述车辆所处路面的路面工况信息为比利时路工况时,基于比利时路工况,控制空气悬架系统,禁止对车轮进行高度调节。
54、第三方面:本技术实施例提供一种电子设备,所述电子设备包括:处理器以及存储器;
55、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
56、所述处理器用于根据所述程序代码中的指令执行如上所述的一种车辆高度控制方法的步骤。
57、第四方面:本技术实施例一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的一种车辆高度控制方法的步骤。
58、相较于现有技术,本技术具有以下有益效果:
59、本技术实施例提供的一种车辆高度控制方法,通过获取车辆的行驶状态和车轮高度信息,根据所述行驶状态和车轮高度信息,确定所述行驶状态对应的车轮状态参数,其中,所述静止状态对应的车轮状态参数为车轮的对角高度差值,所述运动状态对应的车轮状态参数为车轮的轮跳值;将所述行驶状态对应的车轮状态参数与所述行驶状态对应的车轮状态指标进行比对,确定所述车辆所处路面的路面工况信息;基于所述路面工况信息,对所述车辆进行高度控制。本技术中可以基于确定出的车轮状态参数,确定所述车辆是否处于特殊路况,如处于不平坦的路面或行驶在比利时路面,基于路面工况信息,对所述车辆进行高度控制,避免ecas的异常调节,提高ecas的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!