车辆停泊方法、装置、计算机设备和存储介质与流程
本技术涉及自动泊车,特别是涉及一种车辆停泊方法、装置、计算机设备和存储介质。
背景技术:
1、随着车辆辅助驾驶技术的不断发展,车辆辅助驾驶技术能够完成的驾驶操作也越加完善;例如,车辆辅助驾驶技术可控制车辆完成在平行车位进行自动泊车操作。
2、但是,为保证车辆进行自动泊车的泊车精准度,需要对车辆的泊车起始位置和车辆行驶方向进行限定,这也导致了车辆在自动泊车的过程中灵活性较差,无法适应复杂的泊车环境。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够增加车辆在自动泊车的过程中灵活性的车辆停泊方法、装置、计算机设备和存储介质。
2、第一方面,本技术提供了一种车辆停泊方法。所述方法包括:
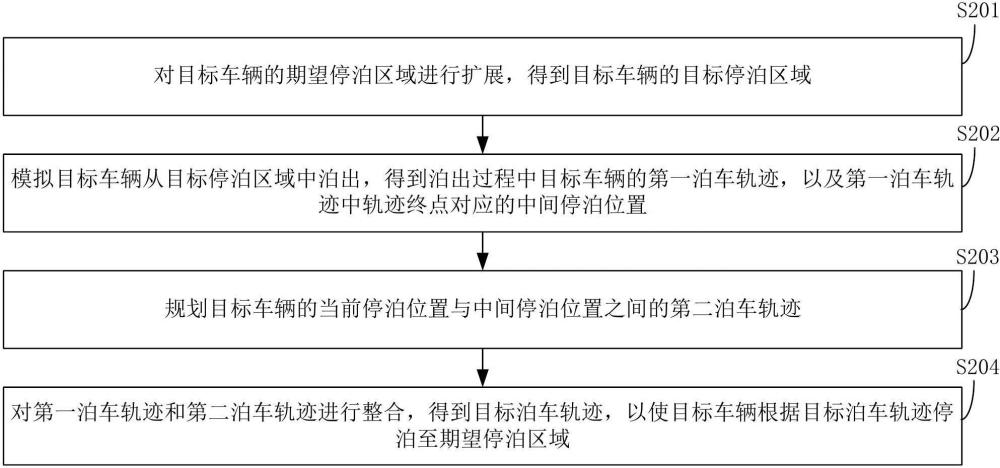
3、对目标车辆的期望停泊区域进行扩展,得到所述目标车辆的目标停泊区域;
4、模拟所述目标车辆从所述目标停泊区域中泊出,得到泊出过程中所述目标车辆的第一泊车轨迹,以及所述第一泊车轨迹中轨迹终点对应的中间停泊位置;其中,所述中间停泊位置为所述目标车辆离开所述目标停泊区域的位置;
5、规划所述目标车辆的当前停泊位置与中间停泊位置之间的第二泊车轨迹;
6、对所述第一泊车轨迹和所述第二泊车轨迹进行整合,得到目标泊车轨迹,以使所述目标车辆根据目标泊车轨迹停泊至所述期望停泊区域。
7、在其中一个实施例中,所述对目标车辆的期望停泊区域进行扩展,得到所述目标车辆的目标停泊区域,包括:
8、将所述期望停泊区域的第一区域边界沿着所述目标车辆的第一预设方向移动,得到第一目标边界;其中,所述第一区域边界为所述期望停泊区域的区域边界中与所述第一预设方向垂直的边界;所述第一预设方向为所述期望停泊区域中较长边界线对应的任一方向;
9、根据所述第一目标边界,对目标车辆的期望停泊区域进行区域扩展,得到所述目标车辆的候选停泊区域;
10、确定所述目标车辆在所述候选停泊区域内的车辆泊出情况;
11、根据所述车辆泊出情况和所述候选停泊区域,确定所述目标车辆的目标停泊区域。
12、在其中一个实施例中,所述将所述期望停泊区域的第一区域边界沿着所述目标车辆第一预设方向移动,得到第一目标边界,包括:
13、将所述期望停泊区域的第一区域边界沿着所述目标车辆的第一预设方向移动,并检测第一区域边界在移动过程中与所移动方向上的第一障碍物之间的第一距离;
14、将移动过程中,与第一障碍物之间的第一距离小于或者等于第一距离阈值情况下的第一区域边界,作为第一目标边界。
15、在其中一个实施例中,所述根据所述车辆泊出情况和所述候选停泊区域,确定所述目标车辆的目标停泊区域,包括:
16、若所述车辆泊出情况为第一泊出情况,则将所述候选停泊区域作为所述目标车辆的目标停泊区域;
17、若所述车辆泊出情况为第二泊出情况,则将所述候选停泊区域的第二区域边界向所述目标车辆的第二预设方向移动,得到第二目标边界;根据所述第二目标边界对所述候选停泊区域进行区域扩展,得到所述目标车辆的目标停泊区域;其中,所述第二区域边界为所述候选停泊区域的边界区域中与所述第二预设方向垂直的边界;所述第二预设方向为所述第一预设方向的反方向;
18、其中,所述第一泊出情况为所述目标车辆能够通过单次转向操作从所述候选停泊区域内泊出;所述第二泊出情况为所述目标车辆无法通过单次转向操作从所述候选停泊区域内泊出。
19、在其中一个实施例中,所述将所述候选停泊区域的第二区域边界向所述目标车辆的第二预设方向移动,得到第二目标边界,包括:
20、将所述候选停泊区域的第二区域边界沿着所述第二预设方向移动,并检测第二区域边界在移动过程中与所移动方向上的第二障碍物之间的第二距离;
21、将移动过程中,与第二障碍物之间的第二距离小于或者等于第二距离阈值情况下的第二区域边界,作为第二目标边界。
22、在其中一个实施例中,所述确定所述目标车辆在所述候选停泊区域内的车辆泊出情况,包括:
23、将所述第一障碍物的障碍物边界上与所述第一区域边界距离最近的位置点,作为碰撞检测点;
24、判断所述目标车辆的车辆旋转中心与所述碰撞检测点之间的碰撞距离,是否大于预先设定的碰撞距离阈值;
25、若是,则确定所述车辆泊出情况为第一泊出情况;
26、若否,则确定所述车辆泊出情况为第二泊出情况。
27、在其中一个实施例中,所述模拟所述目标车辆从所述目标停泊区域中泊出,包括:
28、在所述目标停泊区域中生成所述目标车辆对应的模拟车辆;其中,所述模拟车辆的车辆尺寸与所述目标车辆的车辆尺寸相同;
29、将所述模拟车辆上与第二目标边界重合的位置作为泊出起始位置,并根据模拟泊出方向,在所述泊出起始位置对所述模拟车辆进行转向泊出;
30、验证所述模拟车辆能否在不接触第一障碍物的情况下,从所述目标停泊区域内泊出;
31、若是,则根据所述模拟车辆,模拟所述目标车辆从所述目标停泊区域中泊出;
32、若否,则对虚拟车辆在所述目标停泊区域内进行揉库操作,模拟所述目标车辆从所述目标停泊区域中泊出。
33、第二方面,本技术还提供了一种车辆停泊装置。所述装置包括:
34、扩展模块,用于对目标车辆的期望停泊区域进行扩展,得到所述目标车辆的目标停泊区域;
35、模拟模块,用于模拟所述目标车辆从所述目标停泊区域中泊出,得到泊出过程中所述目标车辆的第一泊车轨迹,以及所述第一泊车轨迹中轨迹终点对应的中间停泊位置;其中,所述中间停泊位置为所述目标车辆离开所述目标停泊区域的位置;
36、规划模块,用于规划所述目标车辆的当前停泊位置与中间停泊位置之间的第二泊车轨迹;
37、整合模块,用于对所述第一泊车轨迹和所述第二泊车轨迹进行整合,得到目标泊车轨迹,以使所述目标车辆根据目标泊车轨迹停泊至所述期望停泊区域。
38、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
39、对目标车辆的期望停泊区域进行扩展,得到所述目标车辆的目标停泊区域;
40、模拟所述目标车辆从所述目标停泊区域中泊出,得到泊出过程中所述目标车辆的第一泊车轨迹,以及所述第一泊车轨迹中轨迹终点对应的中间停泊位置;其中,所述中间停泊位置为所述目标车辆离开所述目标停泊区域的位置;
41、规划所述目标车辆的当前停泊位置与中间停泊位置之间的第二泊车轨迹;
42、对所述第一泊车轨迹和所述第二泊车轨迹进行整合,得到目标泊车轨迹,以使所述目标车辆根据目标泊车轨迹停泊至所述期望停泊区域。
43、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
44、对目标车辆的期望停泊区域进行扩展,得到所述目标车辆的目标停泊区域;
45、模拟所述目标车辆从所述目标停泊区域中泊出,得到泊出过程中所述目标车辆的第一泊车轨迹,以及所述第一泊车轨迹中轨迹终点对应的中间停泊位置;其中,所述中间停泊位置为所述目标车辆离开所述目标停泊区域的位置;
46、规划所述目标车辆的当前停泊位置与中间停泊位置之间的第二泊车轨迹;
47、对所述第一泊车轨迹和所述第二泊车轨迹进行整合,得到目标泊车轨迹,以使所述目标车辆根据目标泊车轨迹停泊至所述期望停泊区域。
48、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
49、对目标车辆的期望停泊区域进行扩展,得到所述目标车辆的目标停泊区域;
50、模拟所述目标车辆从所述目标停泊区域中泊出,得到泊出过程中所述目标车辆的第一泊车轨迹,以及所述第一泊车轨迹中轨迹终点对应的中间停泊位置;其中,所述中间停泊位置为所述目标车辆离开所述目标停泊区域的位置;
51、规划所述目标车辆的当前停泊位置与中间停泊位置之间的第二泊车轨迹;
52、对所述第一泊车轨迹和所述第二泊车轨迹进行整合,得到目标泊车轨迹,以使所述目标车辆根据目标泊车轨迹停泊至所述期望停泊区域。
53、上述车辆停泊方法、装置、计算机设备和存储介质,通过对期望停泊区域进行扩展,得到目标车辆的目标停泊区域,获取目标车辆从目标停泊区域中泊出的第一泊车轨迹,以及第一泊车轨迹中轨迹终点对应的中间停泊位置;告知规划目标车辆的当前停泊位置与中间停泊位置之间的第二泊车轨迹;对第一泊车轨迹和第二泊车轨迹进行整合,得到目标泊车轨迹。根据上述内容可知,本技术为保证目标车辆能够顺利停泊至期望停泊区域,会预先对的期望停泊区域进行扩展,以得到区域面积更大的目标停泊区域,使得目标车辆在停泊过程中有更大的揉库空间,实现降低目标车辆停泊至期望停泊区域的操作难度,并且,通过模拟目标车辆从目标停泊区域中泊出的第一泊车轨迹,以及规划目标车辆的当前停泊位置与中间停泊位置之间的第二泊车轨迹,使得后续在目标车辆停泊过程中,目标车辆能够根据第二泊车轨迹从当前停泊位置行驶至中间停泊位置,并且,根据第一泊车轨迹进行反向行驶,使得目标车辆能够从目标停泊位置停泊至期望停泊区域;保证了目标车辆能够从任意当前停泊位置进行自动泊车操作,无需对目标车辆的泊车起始位置和车辆行驶方向进行限定,使得目标车辆能够在多种复杂的泊车环境下进行自动泊车操作。
- 还没有人留言评论。精彩留言会获得点赞!