一种掉头控制方法、装置、系统及车辆与流程
本技术涉及车辆,具体地说,涉及一种掉头控制方法、装置、系统及车辆。
背景技术:
1、随着汽车智能化的快速发展,对车辆驾驶的便利性和安全性的要求也越来越高。小半径掉头能够实现车辆在狭窄空间内的有效掉头,是提高车辆驾驶便利性和安全性的有效策略。
2、然而,目前的小半径掉头方法需要车辆的每个车轮具备独立的动力源,成本高昂,难以普及到动力输出不对称的普通四驱车辆。而对于动力输出不对称的普通四驱车辆,在狭窄空间内掉头时,则需要多次来回前后移动车辆才能完成掉头,无法保证车辆驾驶的便利性和安全性。
3、因此,提供一种能够控制动力输出不对称的普通四驱车辆自动执行小半径掉头的方法是目前亟待解决的技术问题。
技术实现思路
1、为解决上述技术问题,本技术提供了一种掉头控制方法、装置、系统及车辆,以控制动力输出不对称的普通四驱车辆自动执行小半径掉头。
2、为实现上述技术目的,本技术实施例提供了如下技术方案:
3、第一方面,本说明书实施方式提供了一种掉头控制方法,包括:
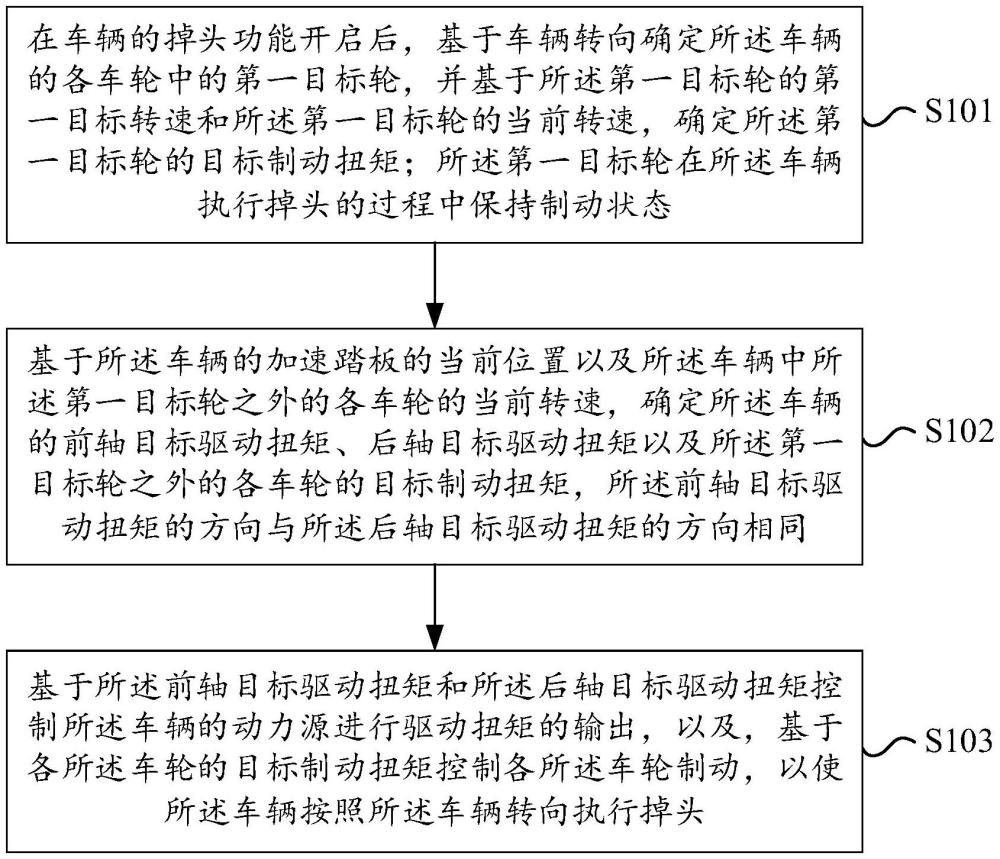
4、在车辆的掉头功能开启后,基于车辆转向确定所述车辆的各车轮中的第一目标轮,并基于所述第一目标轮的第一目标转速和所述第一目标轮的当前转速,确定所述第一目标轮的目标制动扭矩;所述第一目标轮在所述车辆执行掉头的过程中保持制动状态;
5、基于所述车辆的加速踏板的当前位置以及所述车辆中所述第一目标轮之外的各车轮的当前转速,确定所述车辆的前轴目标驱动扭矩、后轴目标驱动扭矩以及所述第一目标轮之外的各车轮的目标制动扭矩,所述前轴目标驱动扭矩的方向与所述后轴目标驱动扭矩的方向相同;
6、基于所述前轴目标驱动扭矩和所述后轴目标驱动扭矩控制所述车辆的动力源进行驱动扭矩的输出,以及,基于各所述车轮的目标制动扭矩控制各所述车轮制动,以使所述车辆按照所述车辆转向执行掉头。
7、可选地,所述第一目标轮为后轮,所述第一目标轮位于所述车辆中与所述车辆转向相同的一侧;
8、所述基于所述车辆的加速踏板的当前位置以及所述车辆中所述第一目标轮之外的各车轮的当前转速,确定所述车辆的前轴目标驱动扭矩、后轴目标驱动扭矩以及所述第一目标轮之外的各车轮的目标制动扭矩,包括:
9、基于所述加速踏板的当前位置,确定第二目标轮的目标转速和第三目标轮的目标转速,所述第二目标轮与所述第一目标轮位于所述车辆的同一侧,所述第三目标轮与所述第一目标轮位于所述车辆的同一驱动轴;
10、基于所述第二目标轮的目标转速和所述第二目标轮的当前转速,确定所述第二目标轮的目标制动扭矩;
11、基于所述第三目标轮的目标转速、所述第三目标轮的当前转速以及所述第三目标轮的滑移信息,确定所述后轴目标驱动扭矩以及所述第三目标轮的目标制动扭矩;
12、基于第四目标轮的当前转速和所述第二目标轮的当前转速,确定所述前轴目标驱动扭矩以及所述第四目标轮的目标制动扭矩;所述第四目标轮与所述第二目标轮位于所述车辆的同一驱动轴。
13、可选地,所述基于所述第二目标轮的目标转速和所述第二目标轮的当前转速,确定所述第二目标轮的目标制动扭矩,包括:
14、基于所述第二目标轮的目标转速和所述第二目标轮的当前转速,采用闭环控制的方法确定所述第二目标轮的需求制动扭矩;
15、基于所述第二目标轮的需求制动扭矩以及所述第二目标轮的制动扭矩的斜率阈值,确定所述第二目标轮的目标制动扭矩。
16、可选地,所述基于所述第三目标轮的目标转速、所述第三目标轮的当前转速以及所述第三目标轮的滑移信息,确定所述后轴目标驱动扭矩以及所述第三目标轮的目标制动扭矩,包括:
17、基于所述第三目标轮的目标转速和所述第三目标轮的当前转速,确定所述第三目标轮的转速误差;
18、基于所述第三目标轮的转速误差,确定后轴初始驱动扭矩;
19、在所述第三目标轮的滑移信息表征所述第三目标轮的当前状态为滑移状态时,更新所述后轴初始驱动扭矩以及确定所述第三目标轮的目标制动扭矩,并将更新后的后轴初始驱动扭矩作为所述后轴目标驱动扭矩。
20、可选地,所述基于第四目标轮的当前转速和所述第二目标轮的当前转速,确定所述前轴目标驱动扭矩以及所述第四目标轮的目标制动扭矩,包括:
21、获取所述第四目标轮的当前转速与所述第二目标轮的当前转速的转速差;
22、基于所述转速差与预设阈值的比较结果,确定所述第四目标轮满足滑移控制条件时,基于所述转速差更新前轴当前驱动扭矩以及确定所述第四目标轮的目标制动扭矩,并将更新后的前轴当前驱动扭矩作为所述前轴目标驱动扭矩。
23、可选地,所述基于所述前轴目标驱动扭矩和所述后轴目标驱动扭矩控制所述车辆的动力源进行驱动扭矩的输出,以及,基于各所述车轮的目标制动扭矩控制各所述车轮制动之后,还包括:
24、在所述车辆的各车轮的转速均为0时,以所述第一目标轮的第二目标转速为目标,更新所述第一目标轮的当前制动扭矩,并基于所述第一目标轮的当前制动扭矩的更新结果控制所述第一目标轮制动;所述第二目标转速大于所述第一目标转速。
25、可选地,在车辆的掉头功能开启之前,还包括:
26、在接收到掉头允许指令时,获取所述车辆的当前车速和通过所述车辆的方向调节装置输入的车辆转向角度;
27、在所述当前车速小于或等于预设车速,且所述车辆转向角度大于或等于预设角度时,控制所述车辆的掉头功能开启。
28、第二方面,本说明书实施方式提供了一种掉头控制装置,包括:
29、第一处理模块,用于在车辆的掉头功能开启后,基于车辆转向确定所述车辆的各车轮中的第一目标轮,并基于所述第一目标轮的第一目标转速和所述第一目标轮的当前转速,确定所述第一目标轮的目标制动扭矩;所述第一目标轮在所述车辆执行掉头的过程中保持制动状态;
30、第二处理模块,用于基于所述车辆的加速踏板的当前位置以及所述车辆中所述第一目标轮之外的各车轮的当前转速,确定所述车辆的前轴目标驱动扭矩、后轴目标驱动扭矩以及所述第一目标轮之外的各车轮的目标制动扭矩;
31、第三处理模块,用于基于所述前轴目标驱动扭矩和所述后轴目标驱动扭矩控制所述车辆的动力源进行驱动扭矩的输出,以及,基于各所述车轮的目标制动扭矩控制各所述车轮制动,以使所述车辆按照所述车辆转向执行掉头。
32、第三方面,本说明书实施方式提供了一种掉头控制系统,包括:信号获取单元和控制单元,所述信号获取单元用于获取车辆转向、车辆的加速踏板的当前位置以及所述车辆的各车轮的当前转速;
33、所述控制单元包括至少一个处理器和至少一个存储器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时实现如上述任一项所述的掉头控制方法。
34、第四方面,本说明书实施方式提供了一种车辆,所述车辆包括如上述所述的掉头控制系统。
35、第五方面,本说明书实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时,实现如上述任一项所述的掉头控制方法。
36、第六方面,本说明书实施例提供了一种计算机程序产品或计算机程序,所述计算机程序产品包括计算机程序,所述计算机程序存储在计算机可读存储介质中;所述计算机设备的处理器从所述计算机可读存储介质读取所述计算机程序,所述处理器执行所述计算机程序时实现如上述任一项所述的掉头控制方法。
37、从上述技术方案可以看出,本技术实施例提供了一种掉头控制方法、装置、系统及车辆,其中,所述掉头控制方法在车辆的掉头功能开启后,基于车辆转向确定车辆的各车轮中的第一目标轮,并基于第一目标轮的第一目标转速和第一目标轮的当前转速确定第一目标轮的目标制动扭矩,第一目标轮在车辆执行掉头的过程中保持制动状态,以及,基于车辆的加速踏板的当前位置以及车辆中第一目标轮之外的各车轮的当前转速,确定车辆的前轴目标驱动扭矩、后轴目标驱动扭矩以及第一目标轮之外的各车轮的目标制动扭矩,前轴目标驱动扭矩的方向与后轴目标驱动扭矩的方向相同,以基于前轴目标驱动扭矩和后轴目标驱动扭矩控制车辆的动力源进行驱动扭矩的输出以及基于各车轮的目标制动扭矩控制各车轮制动,使得车辆按照车辆转向和加速踏板的位置信号自动执行掉头,从而对于包含前轴动力源和后轴动力源或仅包含一个动力源的普通四驱车辆,能够自动控制车辆执行小半径掉头,保证了车辆驾驶的便利性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!