一种协同自适应巡航控制方法、装置和电子设备
本技术属于自动控制,具体涉及一种协同自适应巡航控制方法、装置和电子设备。
背景技术:
1、自适应巡航控制系统是在按设定车速进行巡航控制的系统上,增加了与前方车辆保持合理间距控制功能的新系统。装有自适应巡航控制系统的智能汽车,通过雷达和计算机来鉴别靠近车辆的是自行车、汽车还是行人根据道路情况控制车辆行驶状态,完全或部分地取代了驾驶员的操作。
2、为了解决自适应巡航控制系统对前车的跟随协同问题,现有技术引入协同自适应巡航控制(cooperative adaptive cruise control,cacc)。协同自适应巡航控制是自适应巡航的一种进阶控制方法,是智能网联汽车的重要技术之一,相较于自适应巡航控制,协同自适应巡航控制可以与前车进行通信,因此可以更好地保证车辆跟随的安全性与舒适性,实现较小跟车时距下的车辆编队行驶。
3、当前的研究表明,即使所有由电子电气系统的失效造成的风险都被功能安全相关活动所解决,cacc也可能因为预期功能的设计不足或性能缺陷,最终导致严重的危害后果。而cacc的安全运行依赖稳定准确的通信,通信设备在各种复杂异常条件下会出现通信时延、丢包甚至中断的问题。这些问题可能会导致车辆队列运行不稳定或整车碰撞的危害。因此,如何提升车辆队列运行的稳定性,是有待解决的关键问题。
技术实现思路
1、本技术旨在提供一种协同自适应巡航控制方法、装置、电子设备及存储介质,以解决现有技术中车辆队列运行的稳定性较低的问题。
2、为了解决上述技术问题,本技术是这样实现的:
3、第一方面,本技术实施例提供了一种协同自适应巡航控制方法,应用于目标车辆,所述方法包括:
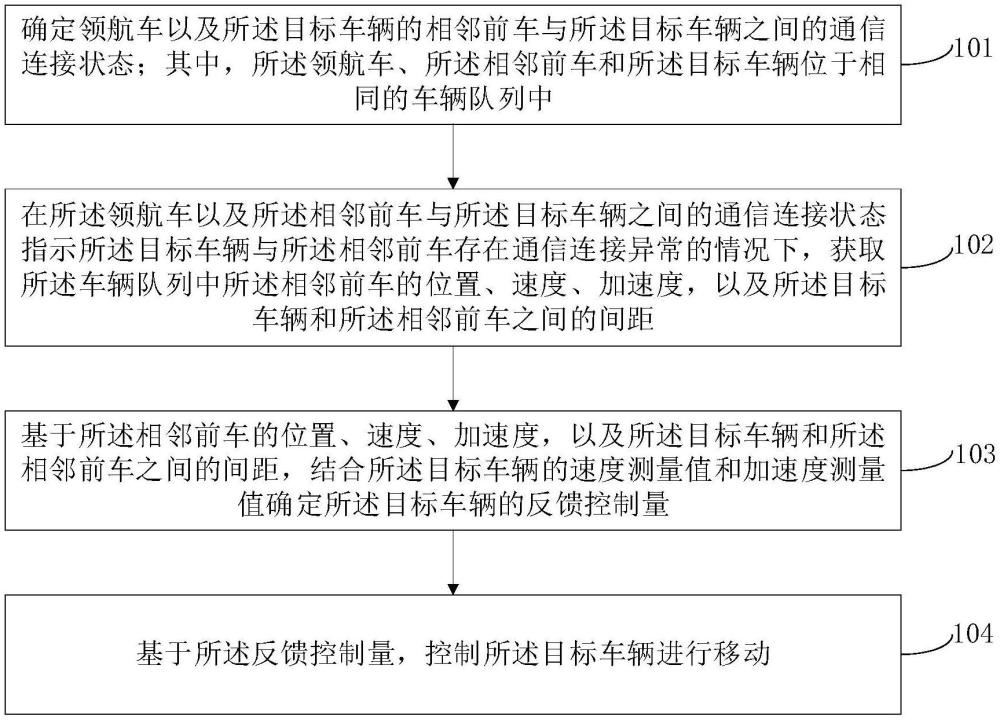
4、确定领航车以及所述目标车辆的相邻前车与所述目标车辆之间的通信连接状态;其中,所述领航车、所述相邻前车和所述目标车辆位于相同的车辆队列中;
5、在所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态指示所述目标车辆与所述相邻前车存在通信连接异常的情况下,获取所述车辆队列中所述相邻前车的位置、速度、加速度,以及所述目标车辆和所述相邻前车之间的间距;
6、基于所述相邻前车的位置、速度、加速度和所述目标车辆和所述相邻前车之间的间距,结合所述目标车辆的速度测量值和加速度测量值确定所述目标车辆的反馈控制量;
7、基于所述反馈控制量,控制所述目标车辆进行移动;
8、其中,所述反馈控制量按照下式计算:
9、ui(t)=-kixi(t)
10、上式中,ui(t)为目标车辆的反馈控制量,ki为预设控制系数,xi(t)为目标车辆的控制系统状态,定义为xi(t)=[εi δvi ai]t,其中,εi表示所述目标车辆与所述相邻前车之间的相对距离误差,δvi表示所述目标车辆与所述相邻前车之间的相对速度,ai表示所述目标车辆的加速度;
11、所述相对距离误差按照下式计算:
12、εi=(di-li)-di,des
13、上式中,li为所述目标车辆i的车身长度,di,des为所述车辆队列中所述相邻车辆的期望间距,di为所述目标车辆与所述相邻前车之间的相对间距;
14、所述相对间距按照下式计算:
15、di=λ(pi-1,c-pi)+(1-λ)di,ra
16、上式中,λ为自适应系数,pi-1,c为所述相邻前车的位置,pi为所述目标车辆的位置,di,ra为所述目标车辆的毫米波雷达测得的所述目标车辆与所述相邻前车的间距。
17、可选地,所述基于所述相邻前车的位置、速度、加速度,以及所述目标车辆和所述相邻前车之间的间距,结合所述目标车辆的速度测量值和加速度测量值确定所述目标车辆的反馈控制量,包括:
18、在所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态指示所述目标车辆与所述领航车之间的通信连接正常的情况下,基于所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态,确定所述领航车的位置、速度、加速度;
19、基于所述领航车的位置、速度、加速度,所述相邻前车的位置、速度、加速度和所述目标车辆和所述相邻前车之间的间距,结合所述的目标车辆的速度测量值和加速度测量值确定所述目标车辆的反馈控制量。
20、可选地,所述基于所述领航车的位置、速度、加速度,所述相邻前车的位置、速度、加速度和所述目标车辆和所述相邻前车之间的间距,结合所述的目标车辆的速度测量值和加速度测量值确定所述目标车辆的反馈控制量,包括:
21、获取所述目标车辆的状态向量;其中,所述目标车辆的状态向量包括所述目标车辆与所述相邻前车的相对速度、所述目标车辆与所述相邻前车的相对距离误差和所述目标车辆的加速度;所述相对距离误差基于所述目标车辆和所述相邻前车之间的间距和所述目标车辆的长度确定;
22、计算所述目标车辆的状态向量与所述领航车的状态向量之间的差分向量,以及所述目标车辆的状态向量与所述相邻前车的状态向量之间的差分向量;其中,所述领航车的状态向量基于所述领航车的位置、速度、加速度确定;所述相邻前车的状态向量基于所述相邻前车的位置、速度、加速度确定;
23、将所述目标车辆的状态向量与所述领航车的状态向量之间的差分向量与所述目标车辆的状态向量与所述相邻前车的状态向量之间的差分向量相加,并将相加后的结果与预设系数相乘,得到所述目标车辆的反馈控制量。
24、可选地,所述确定所述领航车的位置、速度、加速度,包括:
25、获取所述领航车的测量位置、测量速度、测量加速度;
26、确定所述目标车辆和所述领航车之间的通信时间差;
27、采用恒定加速度模型,基于所述目标车辆和所述领航车之间的通信时间差对所述领航车的测量位置、测量速度、测量加速度进行修正,得到修正后的所述领航车的位置、速度、加速度。
28、可选地,所述基于所述相邻前车的位置、速度、加速度和所述目标车辆和所述相邻前车之间的间距,结合所述目标车辆的速度测量值和加速度测量值确定所述目标车辆的反馈控制量,包括:
29、在所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态指示所述目标车辆与所述领航车之间的通信连接异常的情况下,基于所述相邻前车的位置、速度、加速度和所述目标车辆和所述相邻前车之间的间距,确定所述目标车辆的状态向量;
30、将所述目标车辆的状态向量与另一预设系数相乘,得到所述目标车辆的反馈控制量。
31、可选地,所述确定领航车以及所述目标车辆的相邻前车与所述目标车辆之间的通信连接状态,包括:
32、获取领航车与所述目标车辆的相邻前车分别对应的位置、速度、加速度,以及各个领航车与所述目标车辆的相邻前车分别对应的位置、速度和加速度的信息发送时间戳;其中,所述信息发送时间戳由所述领航车与所述相邻前车分别向所述目标车辆发送领航车与所述目标车辆的相邻前车分别对应的位置、速度和加速度时生成;
33、基于所述信息发送时间戳,以及所述目标车辆接收领航车与所述目标车辆的相邻前车分别对应的位置、速度和加速度的信息接收时间戳,确定所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差;
34、基于所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差和所述目标车辆所搭载的控制器的控制周期,确定所述目标车辆与所述领航车以及所述相邻前车之间之间的通信连接状态。
35、可选地,所述基于所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差和所述目标车辆所搭载的控制器的控制周期,确定所述目标车辆与所述领航车以及所述相邻前车之间之间的通信连接状态,包括;
36、在所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差大于或等于所述目标车辆所搭载的控制器的控制周期,且小于预设阈值的情况下,确定所述目标车辆与所述领航车以及所述相邻前车之间之间的通信连接状态为通信连接正常;
37、在所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差大于或等于所述预设阈值的情况下,确定所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态为通信连接异常。
38、可选地,所述方法还包括:
39、从领航车与所述目标车辆的相邻前车分别对应的加速度中确定所述车辆队列中车辆的最大加速度;
40、计算预设定位精度和所述最大加速度之间的商值;
41、计算所述商值的算数平方根,得到所述预设阈值。
42、第二方面,本技术实施例提供一种车辆控制装置,应用于目标车辆,所述装置包括:
43、第通信连接状态确定模块,用于确定领航车以及所述目标车辆的相邻前车与所述目标车辆之间的通信连接状态;其中,所述领航车、所述相邻前车和所述目标车辆位于相同的车辆队列中;
44、位置速度加速度间距获取模块,用于在所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态指示所述目标车辆与所述相邻前车存在通信连接异常的情况下,获取所述车辆队列中所述相邻前车的位置、速度、加速度,以及所述目标车辆和所述相邻前车之间的间距;
45、反馈控制量确定模块,用于基于所述相邻前车的位置、速度、加速度和所述目标车辆和所述相邻前车之间的间距,结合所述目标车辆的速度测量值和加速度测量值确定所述目标车辆的反馈控制量;
46、车辆控制模块,用于基于所述反馈控制量,控制所述目标车辆进行移动;
47、其中,所述反馈控制量按照下式计算:
48、ui(t)=-kixi(t)
49、上式中,ui(t)为目标车辆的反馈控制量,ki为预设控制系数,xi(t)为目标车辆的控制系统状态,所述控制系统状态由所述相邻前车的位置、速度、加速度、所述目标车辆和所述相邻前车之间的间距、所述速度测量值和所述加速度测量值共同确定。
50、可选地,所述反馈控制量确定模块,包括:
51、领航车位置速度加速度确定子模块,用于在所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态指示所述目标车辆与所述领航车之间的通信连接正常的情况下,基于所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态,确定所述领航车的位置、速度、加速度;
52、反馈控制量确定子模块,用于基于所述领航车的位置、速度、加速度,所述相邻前车的位置、速度、加速度和所述目标车辆和所述相邻前车之间的间距,结合所述的目标车辆的速度测量值和加速度测量值确定所述目标车辆的反馈控制量。
53、可选地,所述反馈控制量确定子模块,包括:
54、目标车辆状态向量获取单元,用于获取所述目标车辆的状态向量;其中,所述目标车辆的状态向量包括所述目标车辆与所述相邻前车的相对速度、所述目标车辆与所述相邻前车的相对距离误差和所述目标车辆的加速度;所述相对距离误差基于所述目标车辆和所述相邻前车之间的间距和所述目标车辆的长度确定;
55、差分向量计算单元,用于计算所述目标车辆的状态向量与所述领航车的状态向量之间的差分向量,以及所述目标车辆的状态向量与所述相邻前车的状态向量之间的差分向量;其中,所述领航车的状态向量基于所述领航车的位置、速度、加速度确定;所述相邻前车的状态向量基于所述相邻前车的位置、速度、加速度确定;
56、反馈控制量计算单元,用于将所述目标车辆的状态向量与所述领航车的状态向量之间的差分向量与所述目标车辆的状态向量与所述相邻前车的状态向量之间的差分向量相加,并将相加后的结果与预设系数相乘,得到所述目标车辆的反馈控制量。
57、可选地,所述领航车位置速度加速度确定子模块,包括:
58、领航车位置速度加速度获取单元,用于获取所述领航车的测量位置、测量速度、测量加速度;
59、目标车辆领航车通信时间差确定单元,用于确定所述目标车辆和所述领航车之间的通信时间差;
60、领航车位置速度加速度修正单元,用于采用恒定加速度模型,基于所述目标车辆和所述领航车之间的通信时间差对所述领航车的测量位置、测量速度、测量加速度进行修正,得到修正后的所述领航车的位置、速度、加速度。
61、可选地,所述反馈控制量确定模块,包括:
62、目标车辆状态向量确定子模块,用于在所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态指示所述目标车辆与所述领航车之间的通信连接异常的情况下,基于所述相邻前车的位置、速度、加速度和所述目标车辆和所述相邻前车之间的间距,确定所述目标车辆的状态向量;
63、反馈控制量计算子模块,用于将所述目标车辆的状态向量与另一预设系数相乘,得到所述目标车辆的反馈控制量。
64、可选地,所述通信连接状态确定模块,包括:
65、领航车相邻前车位置速度加速度信息发送时间戳获取子模块,用于获取领航车与所述目标车辆的相邻前车分别对应的位置、速度、加速度,以及各个领航车与所述目标车辆的相邻前车分别对应的位置、速度和加速度的信息发送时间戳;其中,所述信息发送时间戳由所述领航车与所述相邻前车分别向所述目标车辆发送领航车与所述目标车辆的相邻前车分别对应的位置、速度和加速度时生成;
66、领航车相邻前车通信时间差确定子模块,用于基于所述信息发送时间戳,以及所述目标车辆接收领航车与所述目标车辆的相邻前车分别对应的位置、速度和加速度的信息接收时间戳,确定所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差;
67、通信连接状态确定子模块,用于基于所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差和所述目标车辆所搭载的控制器的控制周期,确定所述目标车辆与所述领航车以及所述相邻前车之间之间的通信连接状态。
68、可选地,所述通信连接状态确定子模块,包括;
69、通信连接正常确定单元,用于在所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差大于或等于所述目标车辆所搭载的控制器的控制周期,且小于预设阈值的情况下,确定所述目标车辆与所述领航车以及所述相邻前车之间之间的通信连接状态为通信连接正常;
70、通信连接异常确定单元,用于在所述目标车辆与所述领航车以及所述相邻前车之间分别对应的通信时间差大于或等于所述预设阈值的情况下,确定所述领航车以及所述相邻前车与所述目标车辆之间的通信连接状态为通信连接异常。
71、可选地,所述通信连接状态确定子模块,还包括:
72、最大加速度确定单元,用于从领航车与所述目标车辆的相邻前车分别对应的加速度中确定所述车辆队列中车辆的最大加速度;
73、商值计算单元,用于计算预设定位精度和所述最大加速度之间的商值;
74、预设阈值计算单元,用于计算所述商值的算数平方根,得到所述预设阈值。
75、第三方面,本技术实施例提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现如上任意一项所述的协同自适应巡航控制方法。
76、第四方面,本技术实施例提供了一种计算机可读存储介质,所述可读存储介质中存储有至少一条指令或者至少一段程序,所述至少一条指令或者所述至少一段程序由处理器加载并执行以实现如上任意一项所述的协同自适应巡航控制方法。
77、本技术相比于现有技术,通过确定目标车辆与领航车以及相邻前车之间的通信连接状态;其中,领航车、相邻前车和目标车辆位于相同的车辆队列中;在领航车以及相邻前车与目标车辆之间的通信连接状态指示目标车辆与相邻前车存在通信连接异常的情况下,获取车辆队列中相邻前车的位置、速度、加速度,以及目标车辆和相邻前车之间的间距;基于相邻前车的位置、速度、加速度,以及目标车辆和相邻前车之间的间距,结合目标车辆的速度测量值和加速度测量值确定目标车辆的反馈控制量;基于反馈控制量,控制目标车辆进行移动,能够在目标车辆与车辆队列中前车的通信出现异常时根据相邻前车的位置、速度、加速度以及相邻前车与目标车辆之间的间距得到目标车辆的控制参数,最后通过目标车辆的控制参数对目标车辆进行控制,可以在目标车辆与车辆队列中前车的通信出现异常时对目标车辆进行适应性控制,避免了目标车辆由于与前车的通信中断导致的控制丢失的风险,一定程度上提升了目标车辆所在的车辆队列的运行稳定性。
78、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!