一种调整摄像头角度调节机构及四足巡检机器人的制作方法
本发明涉及工业机器人,特别涉及一种调整摄像头角度调节机构及四足巡检机器人。
背景技术:
1、随着人工智能、无线通讯和机器人等技术的发展,四足机器人逐渐进入工业领域。与人力巡检相比,四足巡检机器人能够针对工业狭窄、粉尘巨大、路面泥泞湿滑,多管缆、多障碍等复杂环境进行无人巡检勘察,大幅度减少人工巡检安全风险,能够全天候作业,提高巡检效率及生产力,提前预防设备故障;能够不间断收集巡检数据,高准确率的数据分析报告能够为专家提供上层回顾支撑并迅速做出决策,减少生产过程安全事故发生。
2、现有的四足巡检机器人多将与摄像头本体连接的机构固定的安装在某一位置,这会使得摄像头本体仅能进行双向的角度调节动作,即相对于机器人本体的左右角度调节以及俯仰角度调节。这种方式虽然简单有效,但是对于具体的现场细节,例如机器人本体附近的环境,容易形成巡检死角盲区等问题。
技术实现思路
1、本发明的目的之一就是提供一种调整摄像头角度调节机构,不仅能在环绕座的基础上实现第一旋转构件和第二旋转构件的双向角度调节,且还能以环绕齿轮与u形齿环形成的配合为基础,实现第一旋转构件和第二旋转构件共同的环绕式移动,从而扩大摄像模块主体对局部的巡检能力。
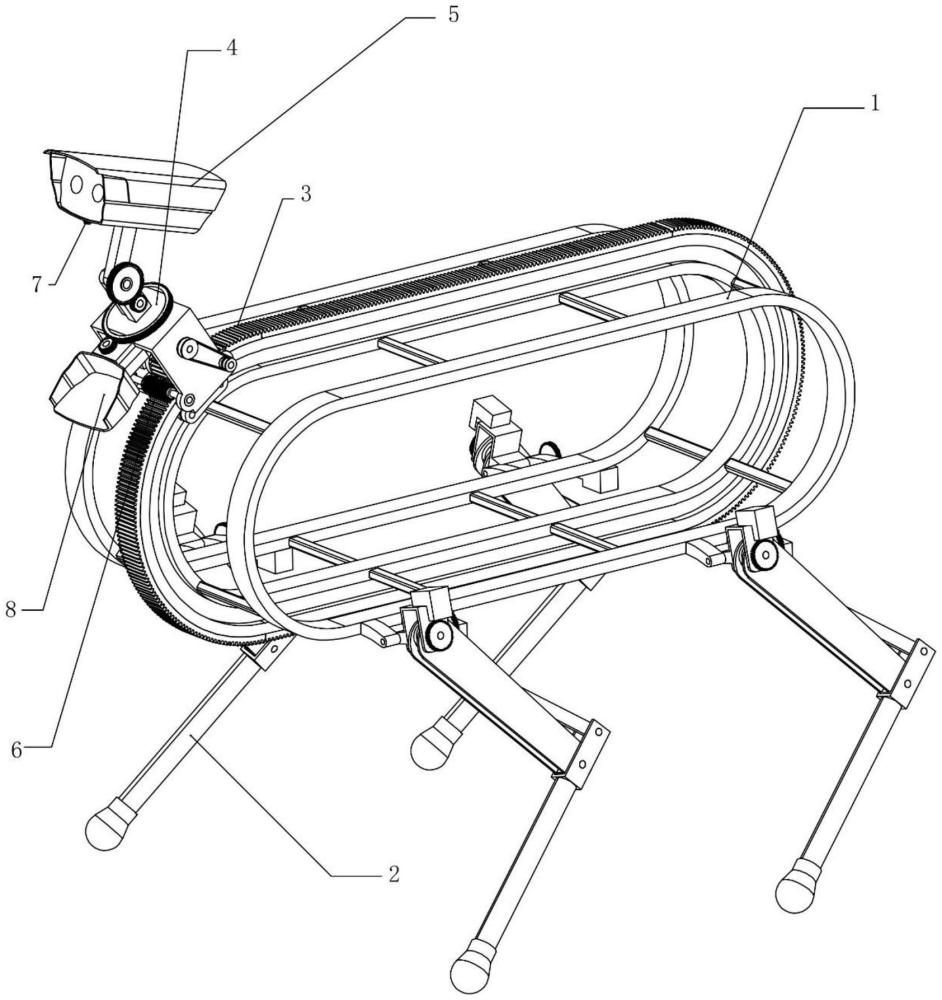
2、本发明的目的是通过这样的技术方案实现的,一种调整摄像头角度调节机构,包括主架构件、环绕移动组件、第一旋转构件、第二旋转构件、双向清扫组件和卡扣齿件,环绕移动组件包括u形齿环和环绕座,第一旋转构件包括顶固齿环,第二旋转构件包括摄像模块主体和防护顶罩,双向清扫组件包括中心锥齿轮和侧锥齿轮;
3、u形齿环固接在主架构件的外中部,环绕座内设有可旋转的环绕齿轮,且环绕座与主架构件的中部滑接,环绕齿轮与u形齿环啮合;
4、环绕座的外端中部旋接有顶固板,顶固齿环固接在顶固板的外侧,环绕座的外端一侧设有可旋转的第一驱动齿轮,且第一驱动齿轮与顶固齿环啮合,摄像模块主体的外底端旋接在顶固板的顶端,防护顶罩罩接在摄像模块主体的外顶端;
5、中心锥齿轮与顶固板的底端固接,侧锥齿轮对称的啮合在中心锥齿轮的两侧,环绕座的底端两侧都旋接有清扫轮,清扫轮的刷毛与u形齿环的外齿面接触,且两组侧锥齿轮分别与不同的清扫轮传动连接;
6、卡扣齿件固接在摄像模块主体的外底端一侧,且在顶固板带动摄像模块主体旋转至第一方向的中位时,摄像模块主体在第二方向上向下旋转到位后,卡扣齿件刚好可卡入到第一驱动齿轮的齿体中。
7、本发明的技术方案的使用过程如下:
8、通过可旋转的环绕齿轮与u形齿环形成的配合传动,以及环绕座与主架构件中部形成的滑接配合,可带动环绕座沿着u形齿环的路径移动到不同的位置,从而可带动安装在环绕座上的第一旋转构件和第二旋转构件以u形齿环为路径移动到不同的位置上,其目的是可将第一旋转构件和第二旋转构件以主架构件为基准,移动到不同的位置上;
9、并通过可旋转的第一驱动齿轮与顶固齿环形成的配合传动,可带动顶固板以及安装在顶固板顶端的第二旋转构件在第一方向上的角度旋转调节;
10、在第二旋转构件跟随顶固板在一定方向上进行角度旋转调节的同时,通过摄像模块主体自身以顶固板为基准的旋转,可实现摄像模块主体和防护顶罩在第二方向上的角度旋转调节;
11、从而不仅可实现摄像模块主体以环绕座为基准的双向角度旋转调节动作,达到调节摄像模块主体视角的目的,且可在环绕座以u形齿环为路径环绕式移动的基础上,达到移动摄像模块主体的目的,从而可提高摄像模块主体的可巡检范围;
12、且在通过第一驱动齿轮与顶固齿环形成的配合使得摄像模块主体旋转到第一方向的中位时,通过摄像模块主体自身相对于顶固板在第二方向上的旋转,可使得摄像模块主体以及防护顶罩形成对正收回状态,并在此刻,卡扣齿件刚好可卡入到第一驱动齿轮中,使得第一驱动齿轮无法自由旋转,从而可使得摄像模块主体在非使用状态下,处于安全稳定的收回状态;
13、且在顶固板旋转的同时,还能同步的带动中心锥齿轮的旋转,使得中心锥齿轮与两侧的侧锥齿轮形成配合传动,从而可带动分布在环绕座底端两侧的清扫轮能够保持相对反向的状态进行旋转;
14、且由于清扫轮的刷毛与u形齿环的齿面始终接触,在环绕座以u形齿环为路径移动的基础上,可使得两组清扫轮分别以不同的旋转方向对u形齿环的齿面进行清扫清洁处理。
15、本发明的另一目的是提供一种四足巡检机器人,还包括腿部构件,腿部构件包括动旋座、主旋齿轮和共动连杆,动旋座分别对称的旋接在主架构件的前后两端,动旋座中旋转连接有仿大腿连杆,仿大腿连杆的另一端旋转连接有仿小腿连杆,且仿大腿连杆和仿小腿连杆可在一定范围内同步的旋转,仿小腿连杆的底端固定连接有脚垫;
16、动旋座的主体内开设有主旋孔,主旋孔中旋转连接有主旋轴,仿大腿连杆的一端插接固定在主旋轴中;
17、主旋齿轮插接固定在主旋轴的外端,动旋座的外侧面安装固定有主旋电机,主旋电机的转轴中插接固定有主旋驱动齿轮,且主旋驱动齿轮与主旋齿轮啮合;
18、仿小腿连杆的顶端下侧固定有小腿旋轴,仿大腿连杆的另一端旋转连接在小腿旋轴中,仿小腿连杆的顶端上侧固定有小腿驱轴,主旋轴中插接固定有内偏心轮,内偏心轮的偏心的固定连接有偏心轴,共动连杆的一端旋转连接在偏心轴中,另一端旋转连接在小腿驱轴中;
19、通过可自动旋转的动旋座,可使得动旋座、仿大腿连杆和仿小腿连杆连接形成的构件能在一定的角度范围内旋转,更能适用于不同的巡检环境;
20、启动主旋电机带动主旋驱动齿轮与主旋齿轮形成配合传动,可带动主旋齿轮与内偏心轮同步且同向的旋转,一方面使得仿大腿连杆以主旋轴为基准旋转,另一方面使得内偏心轮以主旋轴为基准旋转,使得共动连杆在偏心轴与小腿驱轴之间形成旋转配合,从而可带动仿小腿连杆和仿大腿连杆在一定的范围内形成展开以及收缩动作。
21、通过采用上述技术方案,本发明可形成以下有益效果:
22、(1)本发明并非将第一旋转构件和第二旋转构件固定的安装在某一位置,也并非简单的实现摄像模块主体在可旋转的顶固板的基础上的双向角度旋转调节,而是以固定在主架构件中部外端的u形齿环为基础,利用旋接在环绕座内的环绕齿轮与u形齿环形成的啮合,以及环绕座自身与主架构件主体形成的滑接作用,可实现环绕座沿着u形齿环路径的移动,可将第一旋转构件和第二旋转构件随着环绕座移动到相对于主架构件不同的位置上,从而提高第一旋转构件和第二旋转构件巡检的灵活性,扩大摄像模块主体的巡检范围;
23、(2)且本发明在摄像模块主体的外底端一侧还固定安装有卡扣齿件,设置卡扣齿件的目的在于,可对第一驱动齿轮进行限制条件下的卡锁工作,即仅当顶固板带动摄像模块主体旋转至第一方向的中位时,摄像模块主体在第二方向上向下旋转到位后,卡扣齿件才可卡入到第一驱动齿轮的齿体中,从而可在摄像模块主体非使用状态下,对第一驱动齿轮形成锁止,更有利于非使用状态下,摄像模块主体形成安全放置状态;
24、(3)且本发明在顶固板与u形齿环之间还传动连接有双向清扫组件,并通过在顶固板的底端固接中心锥齿轮,中心锥齿轮的两侧都啮合有侧锥齿轮,可使得两组侧锥齿轮的旋转方向始终相反,从而使得两组清扫轮的旋转方向始终相反,配合环绕座自身以u形齿环为路径的移动,利用相对反向旋转的两组清扫轮可对u形齿环的全部外齿面进行清扫工作,消除复杂恶劣环境对环绕齿轮与长路径的u形齿环配合形成的不良影响。
- 还没有人留言评论。精彩留言会获得点赞!