车辆主动悬架控制方法、控制器、车辆、介质及程序产品与流程
本公开涉及车辆悬架,具体地,涉及一种车辆主动悬架控制方法、控制器、车辆、介质及程序产品。
背景技术:
1、悬架系统是汽车的车架与车桥之间所有传力装置的总称,其作用是传递和缓冲作用在车轮和车架之间的力和力矩,并且缓冲由不平路面传给车架或车身的冲击载荷,衰减车身垂向振动。悬架系统关系到车辆舒适性,同时也对车辆性能和安全性有影响,因此它是汽车行业的核心关注点。随着电动化和智能化的提升,主动悬架技术开始广泛应用,为悬架性能的进一步提升提供了可能。
2、在相关技术中,主动悬架控制大多还属于事后控制型,即事件发生后进行阻尼力调节的主动悬架控制,仍存在一定的滞后性,车辆的乘坐舒适性及操纵稳定性低,给车内人员带来不好的乘坐体验。
技术实现思路
1、本公开的目的是提供一种车辆主动悬架控制方法、控制器、车辆、介质及程序产品,以解决相关技术中的问题。
2、为了实现上述目的,本公开实施例的第一方面,提供一种车辆主动悬架控制方法,包括:
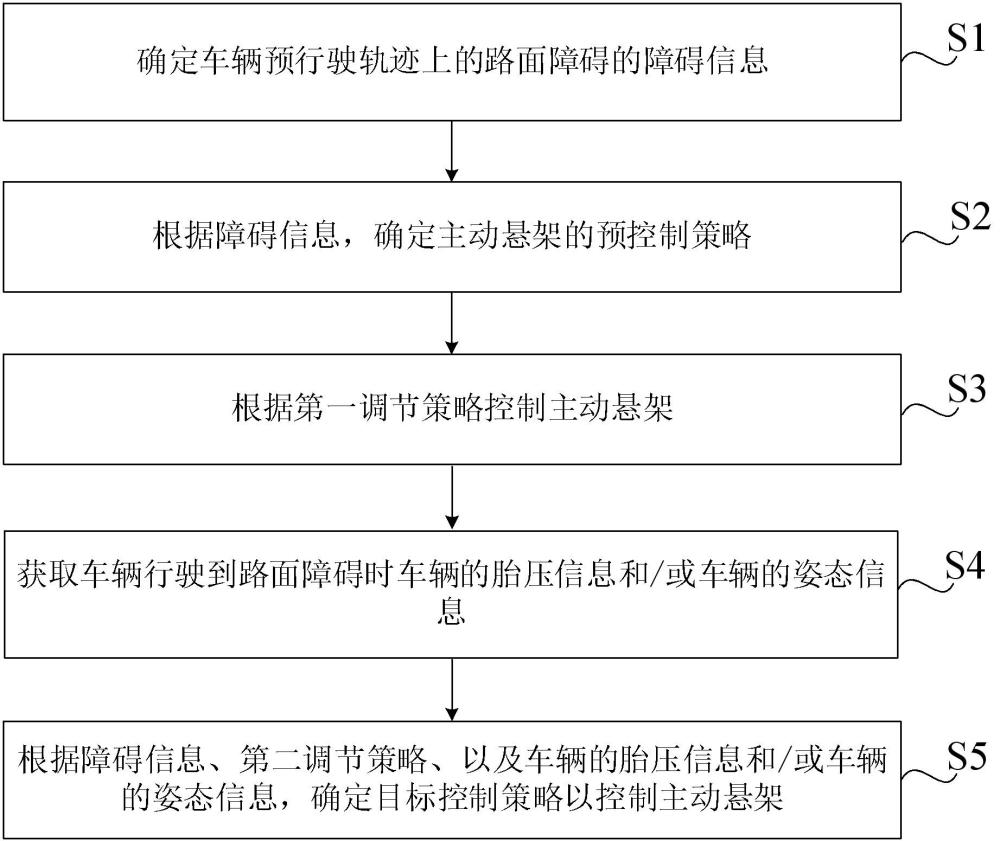
3、确定车辆预行驶轨迹上的路面障碍的障碍信息;
4、根据所述障碍信息,确定所述主动悬架的预控制策略,所述预控制策略包括所述车辆在触及所述路面障碍前的第一调节策略、以及在触及所述路面障碍后的第二调节策略;
5、根据所述第一调节策略控制所述主动悬架;
6、获取所述车辆行驶到所述路面障碍时所述车辆的胎压信息和/或所述车辆的姿态信息;
7、根据所述障碍信息、所述第二调节策略、以及所述车辆的胎压信息和/或所述车辆的姿态信息,确定目标控制策略以控制所述主动悬架。
8、可选地,所述确定车辆预行驶轨迹上的路面障碍的障碍信息,包括:
9、通过摄像头系统获得车辆预行驶轨迹上的路面障碍的障碍类型和可视区信息;
10、通过感知系统获得车辆预行驶轨迹上的路面障碍的高度信息和盲区信息,所述障碍信息包括所述障碍类型、所述可视区信息、所述高度信息和所述盲区信息。
11、可选地,所述摄像头系统包括第一摄像头和第二摄像头,所述第一摄像头的拍摄区域与所述车辆之间的距离大于所述第二摄像头的拍摄区域与所述车辆之间的距离,所述通过摄像头系统获得车辆预行驶轨迹上的路面障碍的障碍类型和可视区信息,包括:
12、获取所述第一摄像头拍摄的包含所述车辆前方路面信息的第一图像;
13、根据所述车辆的车速和方向盘转角,确定所述车辆的预行驶轨迹;
14、根据所述第一图像和所述预行驶轨迹,确定车辆预行驶轨迹上的路面障碍;
15、控制所述第二摄像头对车辆预行驶轨迹上的路面障碍进行拍摄,得到包含所述路面障碍的第二图像;
16、根据包含所述路面障碍的第二图像,得到障碍类型和可视区信息。
17、可选地,所述感知系统包括激光雷达,所述通过感知系统获得车辆预行驶轨迹上的路面障碍的高度信息和盲区信息,包括:
18、通过激光雷达获得车辆预行驶轨迹上的路面障碍的高度信息;
19、根据所述路面障碍的高度信息、障碍类型和可视区信息,预测所述路面障碍的盲区信息。
20、可选地,所述感知系统包括第三摄像头,所述第三摄像头与所述路面障碍之间的距离小于所述第二摄像头与所述路面障碍之间的距离,所述通过感知系统获得车辆预行驶轨迹上的路面障碍的高度信息和盲区信息,包括:
21、根据所述第三摄像头拍摄的包含所述路面障碍的第三图像,预测车辆预行驶轨迹上的路面障碍的高度信息;
22、根据所述路面障碍的高度信息、障碍类型和可视区信息,预测所述路面障碍的盲区信息。
23、可选地,所述根据所述障碍信息,确定所述主动悬架的预控制策略,包括:
24、根据所述障碍类型和所述可视区信息,确定所述主动悬架的第一调节策略;
25、根据所述障碍类型、所述可视区信息、所述高度信息和所述盲区信息,确定所述主动悬架的第二调节策略。
26、可选地,获取所述车辆行驶到所述路面障碍时所述车辆的胎压信息,包括:
27、通过胎压传感器采集所述车辆行驶到所述路面障碍时的胎压信号;
28、对所述胎压信号进行低通滤波处理,得到所述路面障碍的低频冲击,所述路面障碍的胎压信息包括所述路面障碍的低频冲击。
29、可选地,根据所述障碍信息、所述第二调节策略、以及所述车辆的胎压信息,确定目标控制策略以控制所述主动悬架,包括:
30、根据所述障碍信息,确定与所述障碍信息对应的预设胎压信息;
31、根据所述预设胎压信息、所述第二调节策略、以及所述车辆的胎压信息,确定目标控制策略以控制所述主动悬架。
32、可选地,所述根据所述预设胎压信息、所述第二调节策略、以及所述车辆的胎压信息,确定目标控制策略以控制所述主动悬架,包括:
33、在所述预设胎压信息与所述车辆的胎压信息相符的情况下,将所述第二调节策略确定为目标控制策略以控制所述主动悬架;
34、在所述预设胎压信息与所述车辆的胎压信息不相符的情况下,根据所述车辆的胎压信息对所述第二调节策略进行调整,得到目标控制策略以控制所述主动悬架。
35、可选地,根据所述障碍信息、所述第二调节策略、以及所述车辆的姿态信息,确定目标控制策略以控制所述主动悬架,包括:
36、根据所述障碍信息,确定与所述障碍信息对应的预设姿态信息;
37、根据所述预设姿态信息、所述第二调节策略、以及所述车辆的姿态信息,确定目标控制策略以控制所述主动悬架。
38、可选地,所述根据所述预设姿态信息、所述第二调节策略、以及所述车辆的姿态信息,确定目标控制策略以控制所述主动悬架,包括:
39、在所述预设姿态信息与所述车辆的姿态信息相符的情况下,将所述第二调节策略确定为目标控制策略以控制所述主动悬架;
40、在所述预设姿态信息与所述车辆的姿态信息不相符的情况下,根据所述车辆的姿态信息对所述第二调节策略进行调整,得到目标控制策略以控制所述主动悬架。
41、可选地,根据所述障碍信息、所述第二调节策略、以及所述车辆的胎压信息和所述车辆的姿态信息,确定目标控制策略以控制所述主动悬架,包括:
42、根据所述障碍信息,确定与所述障碍信息对应的预设胎压信息;
43、根据所述障碍信息,确定与所述障碍信息对应的预设姿态信息;
44、根据所述预设胎压信息、所述第二调节策略、所述车辆的胎压信息以及所述车辆的姿态信息,确定目标控制策略以控制所述主动悬架。
45、根据本公开实施例的第二方面,提供一种控制器,包括:
46、存储器,其上存储有计算机程序;
47、处理器,用于执行所述存储器中的所述计算机程序,以实现任一项本公开第一方面所提供的车辆主动悬架方法的步骤。
48、根据本公开实施例的第三方面,提供一种车辆,所述车辆包括本公开第二方面所提供的控制器。
49、根据本公开实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现任一项本公开第一方面所提供的车辆主动悬架控制方法的步骤。
50、根据本公开实施例的第五方面,提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现任一项本公开第一方面所提供的车辆主动悬架控制方法的步骤。
51、通过上述技术方案,先确定车辆预行驶轨迹上的路面障碍的障碍信息;再根据障碍信息,确定主动悬架的预控制策略,预控制策略包括车辆在触及路面障碍前的第一调节策略、以及车辆在触及路面障碍后的第二调节策略;根据第一调节策略控制主动悬架;获取车辆行驶到路面障碍时车辆的胎压信息和/或车辆的姿态信息;结合车辆的胎压信息和/或车辆的姿态信息、障碍信息和第二调节策略,确定出目标控制策略来控制主动悬架。通过预控制策略中的第一调节策略在车辆触及路面障碍之前进行预调节,使得车辆在触及路面障碍时不会有较大的触动,减少了车身损伤,增强了安全性,提高了舒适性,且在车辆在行经路面障碍及时通过车辆的胎压信息和/或所述车辆的姿态信息结合路面障碍对第二调节策略进行调整,制定出符合路面障碍实际情况的目标控制策略,进而在车辆经过路面障碍的过程中提高了车辆的平稳性和舒适性,提升车内人员的乘坐体验。
52、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!