折叠式腕臂装置操作方法、折叠式腕臂装置及移动接触网与流程
本发明属于电气化铁路移动接触网领域,具体涉及一种折叠式腕臂装置操作方法、折叠式腕臂装置及移动接触网。
背景技术:
1、现有的移动接触网应用于大型的货运装卸站场,当货运列车驶入或者驶出
2、货运装卸站场时,移动接触网的承力索和/或接触线需要位于铁轨上方,方便货运列车的受电弓抬起后能够从接触线上取电;当货运列车停靠在货运装卸站场时,需要将铁轨上方的接触网移开让出铁轨上方的空间,以便方便装卸作业。现有移动接触网承力索和接触线是固定死在腕臂支持装置上的,当环境温
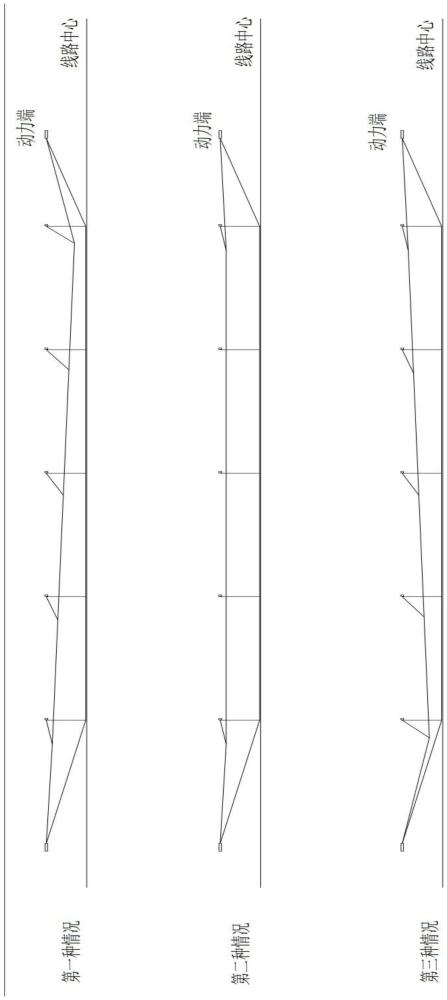
3、度等不变时,不存在导线长线长度变化,此时移动接触网移动到非工作位如图1中第二种情况,移动接触网整体均能在非工作位到位,这是理想的工作状态。但由于热胀冷缩的影响,当环境温度升高时,导线因热胀冷缩原理变长,移动接触网移动至非工作位如图1中第一种情况,无动力端腕臂先转动到位,动力端腕臂距离立柱侧还有较远的距离,移动接触网移动不到位则影响安全装卸作业。当环境温度降低时,导线因热胀冷缩原理变短,移动接触网移动至非工作位如图1中第三种情况,动力端腕臂先转动到位,无动力端腕臂距离立柱侧还有较远的距离,移动接触网移动不到位则影响安全装卸作业。
4、以及,由于腕臂支持装置与腕臂支持装置之间的承力索作用力存在差异,比如移动接触线两端由于挨近动力提供装置,成吨的作用力若直接作用在移动接触网靠近两端的腕臂上,容易损伤腕臂结构,影响使用寿命,另外现有第一根或者最后腕臂转动到位后,停止转动,移动接触网中其余的腕臂支持装置没
5、有转动到铁路侧边,腕臂与腕臂之间的承力索和/或接触线出现未被拉直的情况;若腕臂支持装置未转动到铁路侧边,没有完全让出铁路上方的空间;一方面会妨碍到叉车,悬吊装置对货运列车进行装卸作业;另一方面悬吊装置容易触碰到承力索、接触线,或者触碰到腕臂支持装置,该拖拽动作容易损坏移动接触网,同时还存在安全隐患。
6、为此,能够开发一款新的结构,在腕臂转动到铁路侧边的时候,能够让承力索和接触线能够在动力装置拉动的情况下,承力索和接触线能够进一步地被拉动移动,如此可方便带动腕臂支持装置往铁路侧边进一步移出铁路上方,让出铁路上方的空间方便作业。
技术实现思路
1、为了有效解决现有技术存在的问题,本发明提供一种移动接触网的折叠式腕臂装置,以便解决现有技术中承力索和/或接触线从铁路上方往铁路侧边转动的过程中或者位于铁路侧时,承力索和/或接触线不能被进一步拉动致使移动接触网中的腕臂不能有效的完全移动到铁路侧边的问题。
2、为实现上述目的,本发明第一方面提供一种移动接触网的折叠式腕臂装置操作方法,至少包括如下步骤:所述折叠式腕臂装置至少包括第一腕臂本体结构和至少一个以上的第二腕臂本体结构;
3、所述第一腕臂本体结构可通过所述转动件以可转动的方式安装在移动接触网的立柱上;
4、所述第二腕臂本体结构利用所述可相对转动结构直接或间接的与所述第一腕臂本体连接,所述第二腕臂本体结构通过设置的可相对转动结构被配置为能
5、够相对所述第一腕臂本体结构转动;和/或
6、当至少具有两个第二腕臂本体结构时,相邻的两个所述第二腕臂本体结构之间利用所述可相对转动结构直接或间接的连接;两相邻的所述第二腕臂本体结构之间通过设置的可相对转动结构被配置为能够相对转动;
7、第一腕臂本体结构与至少一个以上的第二腕臂本体结构通过设置的可相对转动结构实现相对转动,调整折叠式腕臂装置的空间伸展长度;
8、折叠式腕臂装置空间伸展长度的调节使得折叠式腕臂装置至少具有如下特征:
9、所述第一腕臂结构上至少具有第一点;一个以上的第二腕臂本体结构中的任意第二腕臂本体结构上至少具有第二点;
10、折叠式腕臂装置处于工作位状态时,所述第一腕臂结构上的第一点与任意第二臂结构上的第二点之间的空间间距为l1;折叠式腕臂装置处于非工作位状态时,所述第一腕臂结构上的第一点与任意第二臂结构上的第二点之间的空间间距为l2;其中l1小于l2;
11、所述供电体被拉动或者被带动或者驱动后能够在铁路的长度方向移动或者在近似铁路的长度方向移动,移动的供电体能够带动或者驱动所述折叠式腕臂装置在近似水平方向或者水平方向转动实现供电体工作位状态与非工作状态之间的切换;
12、或者,还包括驱动装置,所述驱动装置用于驱动所述折叠式腕臂装置在近似水平方向或水平方向转动;所述驱动装置提供拉力和/或推力用于直接或者间接的驱动一个或者多个所述第二腕臂本体结构相对于所述第一腕臂本体结构转动;利用驱动装置带动或者驱动所述折叠式腕臂装置在近似水平方向或者水平方向转动实现供电体工作位状态与非工作状态之间的切换。
13、进一步的,供电体位于两铁轨之间上方对应的空间区域时,折叠式腕臂装置处于工作位状态;供电体位于两铁轨之外的空间区域时,折叠式腕臂装置处于非工作位状态;
14、所述折叠式腕臂装置通过第一腕臂本体结构相对于立柱转动,一个或者多个第二腕臂本体结构相对所述第一腕臂本体结构转动,调整折叠式腕臂装置的空间伸展长度,以匹配所述折叠式腕臂装置在非工作位状态与工作位状态之间的转换。
15、进一步的,移动的供电体在近似水平方向或者水平方向转动从工作位状态转动至非工作位状态的过程中,第一腕臂本体结构与至少一个以上的第二腕臂本体结构通过设置的可相对转动结构实现相对转动;在折叠式腕臂装置由工作位状态向非工作位状态进行转动的全过程中或者该过程中的部分阶段,折叠式腕臂装置的空间伸展长度逐渐增长;
16、和/或
17、移动的供电体在水平方向转动从非工作位状态转动至工作位状态的过程中,第一腕臂本体结构与至少一个以上的第二腕臂本体结构通过设置的可相对转动结构实现相对转动;在折叠式腕臂装置由非工作位状态向工作位状态进行转动的全过程中或者该过程中的部分阶段,折叠式腕臂装置的空间伸展长度逐渐缩短。
18、进一步的,所述第一腕臂本体结构移出两铁轨之间上方对应的空间区域后,移动的供电体提供的作用力能够进一步的带动或者驱动所述第二腕臂本体结构相对于所述第一腕臂本体结构做近似水平方向或者水平方向的转动,进一步增加折叠式腕臂装置的空间伸展长度;和/或
19、所述第一腕臂本体结构移出两铁轨之间上方对应的空间区域后,移动的供电体提供的作用力能够进一步的带动或者驱动两个以上所述第二腕臂本体结构中任意第二腕臂本体结构转动;两相邻的第二腕臂本体结构之间,和/或第一腕臂本体结构与第二腕臂本体结构之间通过设置的可相对转动结构做近似水平方向或水平方向的转动,进一步增加折叠式腕臂装置的空间伸展长度。
20、进一步的,移动的供电体在近似水平方向或水平方向转动从工作位状态转动至非工作位状态的全过程中或者该过程中的部分阶段;第一腕臂本体结构与第二腕臂本体结构之间,和/或,两相邻的第二腕臂本体结构之间形成的开合角度可以逐渐增大;和/或
21、移动的供电体在近似水平方向或水平方向转动从非工作位状态转动至工作位状态的全过程中或者该过程中的部分阶段;第一腕臂本体结构与第二腕臂本体结构之间,和/或,两相邻的第二腕臂本体结构之间形成的开合角度可以逐渐减小。
22、进一步的,所述第一腕臂本体结构移出两铁轨之间上方对应的空间区域后,移动的供电体提供的作用力能够进一步的带动或者驱动所述第二腕臂本体结构相对于所述第一腕臂本体结构做近似水平方向或水平方向的转动,进一步增大第一腕臂本体结构与第二腕臂本体结构之间形成的开合角度;
23、和/或,
24、进一步增大两相邻的第二腕臂本体结构之间形成的开合角度;开合角度的增大有利于供电体进一步在近似铁路的延伸方向移动。
25、进一步的,所述供电体受外力被拉动,所述供电体将受到的拉力直接或者间接的作用在所述第二腕臂本体结构上,从而带动所述第二腕臂本体结构相对于所述第一腕臂本体结构转动,第一腕臂本体结构相对于立柱转动。
26、进一步的,利用转动限位装置来限制所述第二腕臂本体结构相对于第一腕臂本体结构的转动角度;当折叠式腕臂装置处于工作位状态,所述转动限位装置限制第二腕臂本体结构相对于第一腕臂本体结构的转动角度;当折叠式腕臂装置处于非工作位状态,所述转动限位装置限制第二腕臂本体结构相对于第一腕臂本体结构的转动角度。
27、进一步的,移动接触网中采用一个以上的折叠式腕臂装置;折叠式腕臂装置由工作位状态向非工作位状态进行转动的全过程中或者该过程中的部分阶段,由于供电体会热胀冷缩效应,至少存在两个或者两个以上的折叠式腕臂装置的水平转动角度和/或开合角度不相同。
28、本发明第二方面提供一种移动接触网的折叠式腕臂装置,其至少包括折叠式腕臂装置、转动件和供电体,其中,所述折叠式腕臂装置通过直接或间接设置的所述转动件在近似水平方向或水平方向以可转动的方式直接或者间接的安装在立柱上;
29、所述折叠式腕臂装置至少包括第一腕臂本体结构和至少一个以上的第二腕臂本体结构;还包括可相对转动结构;其中
30、所述第一腕臂本体结构可通过所述转动件以可转动的方式安装在移动接触网的立柱上;
31、所述第二腕臂本体结构利用所述可相对转动结构直接或间接的与所述第一腕臂本体连接,所述第二腕臂本体结构通过设置的可相对转动结构被配置为能够相对所述第一腕臂本体结构转动;和/或
32、当至少具有两个第二腕臂本体结构时,相邻的两个所述第二腕臂本体结构之间利用所述可相对转动结构直接或间接的连接;两相邻的所述第二腕臂本体结构之间通过设置的可相对转动结构被配置为能够相对转动;
33、第一腕臂本体结构与至少一个以上的第二腕臂本体结构通过设置的可相对转动结构实现相对转动,调整折叠式腕臂装置的空间伸展长度;折叠式腕臂装置空间伸展长度的调节使得折叠式腕臂装置至少具有如下特征:
34、所述第一腕臂结构上至少具有第一点;一个以上的第二腕臂本体结构中的任意第二腕臂本体结构上至少具有第二点;
35、折叠式腕臂装置处于工作位状态时,所述第一腕臂结构上的第一点与任意第二臂结构上的第二点之间的空间间距为l1;折叠式腕臂装置处于非工作位状态时,所述第一腕臂结构上的第一点与任意第二臂结构上的第二点之间的空间间距为l2;其中l1小于l2;
36、所述供电体被拉动或者被带动或者驱动后能够在铁路的长度方向移动或者在近似铁路的长度方向移动,移动的供电体能够带动或者驱动所述折叠式腕臂装置在近似水平方向或水平方向转动实现供电体工作位状态与非工作状态之间的切换;
37、或者,还包括驱动装置,所述驱动装置用于驱动所述折叠式腕臂装置在近似水平方向或水平方向转动;所述驱动装置提供拉力和/或推力用于直接或者间接的驱动一个或者多个所述第二腕臂本体结构相对于所述第一腕臂本体结构转动;利用驱动装置带动或者驱动所述折叠式腕臂装置在近似水平方向或水平方向转动实现供电体工作位状态与非工作状态之间的切换。
38、进一步的,供电体位于两铁轨之间上方对应的空间区域时,折叠式腕臂装置处于工作位状态;供电体位于两铁轨之外的空间区域时,折叠式腕臂装置处于非工作位状态;
39、所述折叠式腕臂装置通过第一腕臂本体结构相对于立柱转动,一个或者多个第二腕臂本体结构相对所述第一腕臂本体结构转动,调整折叠式腕臂装置的空间伸展长度,以匹配所述折叠式腕臂装置在非工作位状态与工作位状态之间的转换。
40、进一步的,移动的供电体在近似水平方向或者水平方向转动从工作位状态转动至非工作位状态的过程中,第一腕臂本体结构与至少一个以上的第二腕臂本体结构通过设置的可相对转动结构实现相对转动;在折叠式腕臂装置由工作位状态向非工作位状态进行转动的全过程中或者该过程中的部分阶段,折叠式腕臂装置的空间伸展长度逐渐增长;
41、和/或
42、移动的供电体在近似水平方向或水平方向转动从非工作位状态转动至工作位状态的过程中,第一腕臂本体结构与至少一个以上的第二腕臂本体结构通过设置的可相对转动结构实现相对转动;在折叠式腕臂装置由非工作位状态向工作位状态进行转动的全过程中或者该过程中的部分阶段,折叠式腕臂装置的空间伸展长度逐渐缩短。
43、进一步的,所述第一腕臂本体结构移出两铁轨之间上方对应的空间区域后,移动的供电体提供的作用力能够进一步的带动或者驱动所述第二腕臂本体结构相对于所述第一腕臂本体结构做近似水平方向或水平方向的转动,进一步增加折叠式腕臂装置的空间伸展长度;和/或
44、所述第一腕臂本体结构移出两铁轨之间上方对应的空间区域后,移动的供电体提供的作用力能够进一步的带动或者驱动两个以上所述第二腕臂本体结构中任意第二腕臂本体结构转动;两相邻的第二腕臂本体结构之间,和/或第一腕臂本体结构与第二腕臂本体结构之间通过设置的可相对转动结构做近似水平方向或水平方向的转动,进一步增加折叠式腕臂装置的空间伸展长度。
45、进一步的,移动的供电体在近似水平方向或水平方向转动从工作位状态转动至非工作位状态的全过程中或者该过程中的部分阶段;第一腕臂本体结构与第二腕臂本体结构之间,和/或,两相邻的第二腕臂本体结构之间形成的开合角度可以逐渐增大;和/或
46、移动的供电体在近似水平方向或水平方向转动从非工作位状态转动至工作位状态的全过程中或者该过程中的部分阶段;第一腕臂本体结构与第二腕臂本体结构之间,和/或,两相邻的第二腕臂本体结构之间形成的开合角度可以逐渐减小。
47、进一步的,所述第一腕臂本体结构移出两铁轨之间上方对应的空间区域后,移动的供电体提供的作用力能够进一步的带动或者驱动所述第二腕臂本体结构相对于所述第一腕臂本体结构做近似水平方向或者水平方向的转动,进一步增大第一腕臂本体结构与第二腕臂本体结构之间形成的开合角度;
48、和/或,
49、进一步增大两相邻的第二腕臂本体结构之间形成的开合角度;开合角度的增大有利于供电体进一步在近似铁路的延伸方向移动。
50、进一步的,所述供电体受外力被拉动,所述供电体将受到的拉力直接或者间接的作用在所述第二腕臂本体结构上,从而带动所述第二腕臂本体结构相对于所述第一腕臂本体结构转动,第一腕臂本体结构相对于立柱转动。
51、进一步的,还包括转动限位装置,该转动限位装置用于限制所述第二腕臂本体结构相对于第一腕臂本体结构的转动角度;当折叠式腕臂装置处于工作位状态,所述转动限位装置限制第二腕臂本体结构相对于第一腕臂本体结构的转动角度;当折叠式腕臂装置处于非工作位状态,所述转动限位装置限制第二腕臂本体结构相对于第一腕臂本体结构的转动角度。
52、进一步的,所述转动限位装置可采用如下任意一种结构形式:
53、第一种结构形式:所述第一腕臂本体结构直接或者间接的安装有限位杆,
54、该限位杆的一端与第一腕臂本体结构之间为可转动连接,所述限位杆与第二腕臂本体结构相接触的另一端设有限位滑槽,所述第二腕臂本体结构可在限位杆的限位滑槽内滑动;
55、第二种结构形式:所述第二腕臂本体结构直接或者间接的安装有限位杆,
56、该限位杆的一端与第二腕臂本体结构之间为可转动连接,所述限位杆与第一腕臂本体结构相接触的另一端设有限位滑槽,所述第一腕臂本体结构可在限位杆的限位滑槽内滑动;
57、第三种结构形式:所述第一腕臂本体结构与所述第二腕臂本体结构直接或者间接的安装有限位转轴,通过限制转轴实现所述第二腕臂本体结构能够相对于所述第一腕臂本体结构转动;
58、第四种结构形式:所述第一腕臂本体结构与第二腕臂本体结构之间安装有限位弹簧组件。
59、进一步的,所述可相对转动结构采用如下任意一种结构形式:
60、第一种结构形式:所述第一腕臂本体结构与所述第二腕臂本体结构直接或者间接的安装有转轴,通过转轴实现所述第二腕臂本体结构能够相对于所述第一腕臂本体结构转动;
61、第二种结构形式:所述第一腕臂本体结构与第二腕臂本体结构之间直接或者间接的安装有球接,通过球接实现所述第二腕臂本体结构能够相对于所述第一腕臂本体结构转动;
62、第三种结构形式:所述第一腕臂本体结构与第二腕臂本体结构之间直接或者间接的安装有铰链,通过铰链实现所述第二腕臂本体结构能够相对于所述第一腕臂本体结构转动;
63、第四种结构形式:所述第一腕臂本体结构与第二腕臂本体结构之间直接或者间接的安装有相互配合的可旋转的齿轮副,通过可旋转的齿轮副实现所述第二腕臂本体结构能够相对于所述第一腕臂本体结构转动。
64、进一步的,其还包括一个以上绝缘子,所述绝缘子直接或者间接的设置在所述第二腕臂本体结构上,实现供电体与第一腕臂本体结构之间的电气隔离;或者
65、其还包括一个以上绝缘子,所述绝缘子直接或者间接的设置在所述第一腕臂本体结构上,实现供电体与立柱之间的电气隔离;或者
66、其还包括两个以上绝缘子,所述绝缘子直接或者间接的设置在所述第二腕臂本体结构上,实现供电体与第一腕臂本体结构之间的电气隔离;所述绝缘子直接或者间接的设置在所述第一腕臂本体结构上,实现供电体与立柱之间的电气隔离。
67、进一步的,所述供电体包括承力索和/或接触线,所述折叠式腕臂装置还包括转动杆、承力索夹持座和/或接触线夹持座,所述转动杆与所述第二腕臂本体结构转动连接,所述承力索夹持座直接或者间接的设置在所述转动杆的上部用于夹持所述承力索,所述接触线夹持座直接或者间接设置在所述转动杆的下部用于夹持所述接触线。
68、本发明第三方面还提供一种移动接触网,移动接触网中采用一个以上述的折叠式腕臂装置;折叠式腕臂装置由工作位状态向非工作位状态进行转动的全过程中或者该过程中的部分阶段,由于供电体会热胀冷缩效应,至少存在两个或者两个以上的折叠式腕臂装置的水平转动角度和/或开合角度不相同。
69、本发明包括但不限于如下有益效果:
70、1、在当前的接触网系统中,运用了单腕臂装置进行水平摆动的设计。在此架构下,供电体被牢固地固定在腕臂装置上,其固定点与腕臂装置的可旋转点之间的距离是预设且恒定的。当移动接触网需要转向铁路侧边时,由于供电体与腕臂装置间的固定连接,供电体无法进一步被牵引移动,从而导致至少部分腕臂装置未能完全脱离铁路上方区域,这一现象对货物的装卸作业构成了不利影响。此外,现有技术还引入了弹簧套筒作为承力索的移动补偿手段。然而,这种方法在安装与调试过程中较为复杂。更重要的是,弹簧套筒被安置于腕臂装置的自由端,此举显著增加了腕臂的重量负担。为维持结构的稳定性,需额外配置拉杆以分担腕臂结构所承受的重量,否则,在长期运行过程中,腕臂结构可能因承受过大负荷而发生形变。本发明提供的折叠式腕臂装置,首创的将所述转动腕臂装置中至少包括两级以上的腕臂结构;两级以上的腕臂结构中逐级之间直接或者间接以可转动的方式连接,第一腕臂本体结构与第二腕臂本体结构之间,和/或,两相邻的第二腕臂本体结构之间形成的开合角度大小可调;利用转动限位装置来限制第一腕臂结构与第二腕臂结构之间形成的开合角度。所述供电体位于铁路侧边后,移动的供电体提供的作用力能够进一步的带动或者驱动所述第二腕臂本体结构相对于所述第一腕臂本体结构做水平方向的转动,进一步增大第一腕臂本体结构与第二腕臂本体结构之间形成的开合角度;传统的腕臂此时结构是固定的不能伸长或者缩短,供电体又是固定死在腕臂装置上,本发明中采用了折叠式的腕臂,保证了折叠腕臂能够进一步的伸长,这样可有效的保证供电体能够进一步的往前移动,这里的移动就可以让供电体和折叠腕臂进一步的靠向铁路侧边,让出铁轨上方空间区域。
71、2、本发明提供的设计相对于单腕臂装置进行水平摆动的设计,有效的解决了供电体能够进一步被牵引移动,使得移动接触网中的腕臂装置移动到铁路侧边,使得供电体能够完全移动到铁路侧边。与当前广泛采用的弹簧套筒设计思路形成鲜明对比,本发明摒弃了弹簧套筒的应用,转而采用一种创新的连接方式,即两级以上的腕臂本体结构中逐级之间直接或者间接以可转动的方式连接,使得开合角度能够灵活调整。此设计不仅显著减轻了腕臂装置的整体重量,还有效提升了移动接触网在使用过程中的安全性和耐久性,延长了其使用寿命。
72、3、采用折叠式的腕臂结构,采用转动式的连接方式,能自动调整腕臂角度,以补偿因热胀冷缩导致的导线长度变化引起的接触网位置变化。从而让采用折叠式的腕臂结构组成的移动接触网的结构更简单,运行更稳定。
73、4、本发明提供的开合角度可调式转动腕臂装置,通过调整转动角度限制机构的限位角度,承力索与接触线具备进一步被拉动移动的条件,可灵活牵引转动腕臂装置沿铁路侧边实现顺畅转动。此过程中,该装置能够被有效地带动,进一步向铁路侧边移动,确保供电体位于铁路一侧,从而释放铁路上方的空间区域。此举不仅优化了货运列车的装卸作业环境,还显著增强了采用吊装设备进行装卸作业的安全性,有效规避了潜在的安全风险。
74、5、现有的接触网中,供电体是固定死在腕臂装置上,供电体在腕臂装置上的固定死到腕臂装置的可转动点的距离长度是固定的,本发明中所述第二腕臂本体结构相对所述第一腕臂本体结构转动以增长或者缩短整体腕臂装置的长度,本发明中可以根据腕臂装置在工作位或者非工作位不同工作状态,提供不同长度的腕臂装置。
75、6、采用本发明提供腕臂装置及相对应的移动接触网,腕臂装置转动到铁路侧边的时候,或者在转动的过程,所述第二腕臂本体结构能够相对所述第一腕臂本体结构转动,进而调整整体腕臂装置的长度;这样的做法可以有效的解决腕臂装置在转到铁路侧边后能够有效的被进一步拉长,使得供电体能够进一步的移动一段行程。
76、7、在整个移动接触网中,承力索和接触线能够进一步的被拉动移动,如此可方便带动折叠式腕臂装置往铁路侧边转动的过程中,能够有效的将折叠式腕臂装置带动进一步的往铁路侧边移动,从而有效的让出铁路上方的空间,方便对货运列车进行装卸作业,保障了货运列车采用吊装设备进行装卸作业的安全,避免安全隐患。
- 还没有人留言评论。精彩留言会获得点赞!