车辆防碰撞方法、系统、电子设备、车辆及存储介质与流程
本发明涉及车辆安全,尤其涉及一种车辆防碰撞方法、系统、电子设备、车辆及存储介质。
背景技术:
1、随着社会经济发展,越来越多人有能力购买汽车,车辆数量的激增导致道路交通的复杂性增加,在一定程度上增加了车辆碰撞的风险。车辆安全技术中为减少车辆碰撞,在发生紧急碰撞时采用主动刹车系统紧急制动从而实现车辆减速,但在车辆速度过快时不一定能将车辆完全刹停,仍然无法防止碰撞的发生。同时,如果用户在紧急情况下误踩油门,或者在行车过程中,当出现跟随的前车突然向其他车道变道,导致本车道突然出现其他车辆,会使主动刹车系统失效,导致碰撞发生。
技术实现思路
1、本技术实施例的主要目的在于提出一种车辆防碰撞方法、系统、电子设备、车辆及存储介质,旨在有效减少碰撞的发生,提高行车过程中车辆的安全性。
2、为实现上述目的,本技术实施例的一方面提出了一种车辆防碰撞方法,所述车辆防碰撞方法包括:
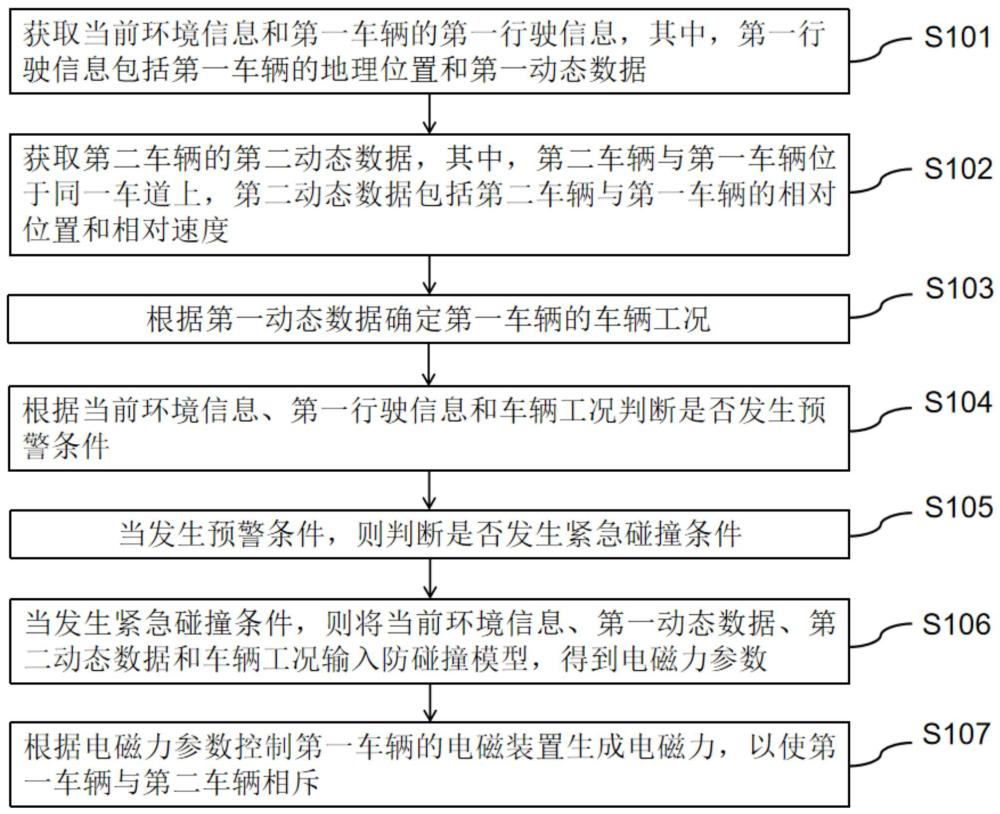
3、获取当前环境信息和第一车辆的第一行驶信息,其中,所述第一行驶信息包括第一车辆的地理位置和第一动态数据;
4、获取第二车辆的第二动态数据,其中,所述第二车辆与所述第一车辆位于同一车道上,所述第二动态数据包括第二车辆与第一车辆的相对位置和相对速度;
5、根据所述第一动态数据确定第一车辆的车辆工况;
6、根据所述当前环境信息、所述第一行驶信息和所述车辆工况判断是否发生预警条件;
7、当发生所述预警条件,则判断是否发生紧急碰撞条件;
8、当发生所述紧急碰撞条件,则将所述当前环境信息、所述第一动态数据、所述第二动态数据和所述车辆工况输入防碰撞模型,得到电磁力参数;
9、根据所述电磁力参数控制第一车辆的电磁装置生成电磁力,以使所述第一车辆与所述第二车辆相斥。
10、在一些实施例中,所述获取当前环境信息和第一车辆的第一行驶信息,包括以下步骤:
11、通过传感组件采集第一车辆的车速、档位、发动机转速、制动踏板开度、油门踏板开度、纵向加速度、横向加速度、横摆角速度、方向盘转角和方向盘角速度,得到第一动态数据;
12、通过定位系统获取第一车辆的地理位置,并将所述地理位置和所述第一动态数据确定为第一行驶信息;
13、根据所述地理位置获取当前路段的路面温度、路面粗糙程度、路面坡度、空气温度、湿度、海拔、气压、降雨量和风力,得到当前环境信息。
14、在一些实施例中,所述获取第二车辆的第二动态数据,包括以下步骤:
15、通过摄像头获取所述第一车辆周围的图像序列;
16、根据所述图像序列识别位于同一车道上的第二车辆;
17、根据所述图像序列计算第二车辆相对于第一车辆的相对位置和相对速度,得到第二动态数据,其中,所述相对位置包括相对方向和相对距离。
18、在一些实施例中,所述根据所述第一动态数据确定第一车辆的车辆工况,包括以下步骤:
19、根据所述车速和所述档位确定第一车辆的车辆状态;
20、当所述车辆状态为驾驶状态,则根据所述车速、所述档位、所述发动机转速、所述制动踏板开度、所述油门踏板开度、所述纵向加速度、所述横向加速度、所述横摆角速度、所述方向盘转角和所述方向盘角速度确定第一车辆的车辆工况。
21、在一些实施例中,所述根据所述当前环境信息、所述第一行驶信息和所述车辆工况判断是否发生预警条件,包括以下步骤:
22、根据所述当前环境信息和所述车辆工况确定对应的碰撞预警模型,其中,所述碰撞预警模型的输入层预设有各个输入参数的权重;
23、将所述第一动态数据中各个参数作为输入参数输入到所述碰撞预警模型中,得到碰撞预警结果,其中,所述碰撞预警结果包括预警启动时机;
24、根据所述预警启动时机判断是否发生预警条件。
25、在一些实施例中,所述判断是否发生紧急碰撞条件,包括以下步骤:
26、根据所述车速、所述相对速度、所述纵向加速度得到安全距离,比较所述安全距离和所述相对距离判断是否发生第一子条件;
27、根据所述油门踏板开度判断是否发生第二子条件;
28、根据所述地理位置判断是否发生第三子条件;
29、当所述第一子条件、所述第二子条件和所述第三子条件中的一种子条件成立,则发生所述紧急碰撞条件,其中,所述第一子条件为安全距离大于相对距离,所述第二子条件为油门踏板开度不等于零,所述第三子条件为当前行驶路段发生事故且第一车辆正在靠近事故发生地。
30、在一些实施例中,所述防碰撞模型通过以下步骤得到:
31、采集实车碰撞数据,并对所述实车碰撞数据进行标注,其中,所述实车碰撞数据的标签为电磁力参数;
32、根据标注后的多个所述实车碰撞数据形成训练数据集;
33、将所述训练数据集输入初始化后的防碰撞模型进行训练,得到训练完的防碰撞模型。
34、在一些实施例中,所述根据所述电磁力参数控制第一车辆的电磁装置生成电磁力,包括以下步骤:
35、当所述相对方向为第二车辆位于第一车辆前方,则根据所述电磁力参数控制第一车辆车头处的电磁装置生成电磁力;
36、或者,当所述相对方向为第二车辆位于第一车辆后方,则根据所述电磁力参数控制第一车辆车尾处的电磁装置生成电磁力。
37、为实现上述目的,本技术实施例的另一方面提出了一种车辆防碰撞系统,所述车辆防碰撞系统包括:
38、第一模块,用于获取当前环境信息和第一车辆的第一行驶信息,其中,所述第一行驶信息包括第一车辆的地理位置和第一动态数据;
39、第二模块,用于获取第二车辆的第二动态数据,其中,所述第二车辆与所述第一车辆位于同一车道上,所述第二动态数据包括第二车辆与第一车辆的相对位置和相对速度;
40、第三模块,用于根据所述第一动态数据确定第一车辆的车辆工况;
41、第四模块,用于根据所述当前环境信息、所述第一行驶信息和所述车辆工况判断是否发生预警条件;
42、第五模块,用于当发生所述预警条件,则判断是否发生紧急碰撞条件;
43、第六模块,用于当发生所述紧急碰撞条件,则将所述当前环境信息、所述第一动态数据、所述第二动态数据和所述车辆工况输入防碰撞模型,得到电磁力参数;
44、第七模块,用于根据所述电磁力参数控制第一车辆的电磁装置生成电磁力,以使所述第一车辆与所述第二车辆相斥。
45、为实现上述目的,本技术实施例的另一方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法。
46、为实现上述目的,本技术实施例的另一方面还提出了一种车辆,所述车辆包括上述车辆防碰撞系统或电子设备。
47、为实现上述目的,本技术实施例的另一方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法。
48、本技术实施例至少包括以下有益效果:本技术实施例的主要目的在于提出一种车辆防碰撞方法、系统、电子设备、车辆及存储介质,该方案通过获取当前环境信息和第一车辆的第一行驶信息,其中,第一行驶信息包括第一车辆的地理位置和第一动态数据;获取第二车辆的第二动态数据;根据第一动态数据确定第一车辆的车辆工况;根据当前环境信息、第一行驶信息和车辆工况判断是否发生预警条件;当发生预警条件,则判断是否发生紧急碰撞条件;当发生紧急碰撞条件,则将当前环境信息、第一动态数据、第二动态数据和车辆工况输入防碰撞模型,得到电磁力参数,根据电磁力参数控制第一车辆的电磁装置生成电磁力,以使第一车辆与第二车辆相斥,能够减少碰撞的发生,提高行车过程中车辆的安全性。
- 还没有人留言评论。精彩留言会获得点赞!