新能源汽车能量控制方法、系统及可读存储介质与流程
本发明涉及汽车能量管理,特别涉及一种新能源汽车能量控制方法、系统及可读存储介质。
背景技术:
1、新能源汽车的能量源来自动力电池包,车辆动态过程中存在超过动力电池包允许充放电功率的情况,这会使得电池出现过充过放现象,从而导致电池包进入主动保护状态或者出现安全风险,车辆出现不良好的驾驶体验和安全风险。在车辆打滑时,轮速和电机转速快速升高,会导致驱动系统功率快速升高,这种工况下如何很好的保证电池放电安全和驾驶平顺性是难点。
2、目前的主要技术方案是,根据电池包允许的放电功率和实际的放电功率,当实际的放电功率接近或超过允许的放电功率时,逐步降低驱动系统的功率。这种方案在车辆打滑时,轮速和电机转速快速升高,导致驱动系统功率快速升高。由于电机转速上升过快,这种逐步降低驱动系统功率的方案会来不及,进而使得电池实际放电功率快速升高,从而超过电池允许放电功率,使得电池进入主动保护状态或者出现安全风险。如果加快驱动功率降低幅度和速度,又会使得功率限制功能频繁激活和明显限制驱动力,导致驾驶性变差,引起客户抱怨。
技术实现思路
1、基于此,本发明的目的是提出一种新能源汽车能量控制方法、系统及可读存储介质,在解决汽车的能源管理因容易出现电池过充过放的情况而导致驾驶安全性和行驶平顺性较差的问题。
2、一方面,本发明提出一种新能源汽车能量控制方法,所述方法包括:
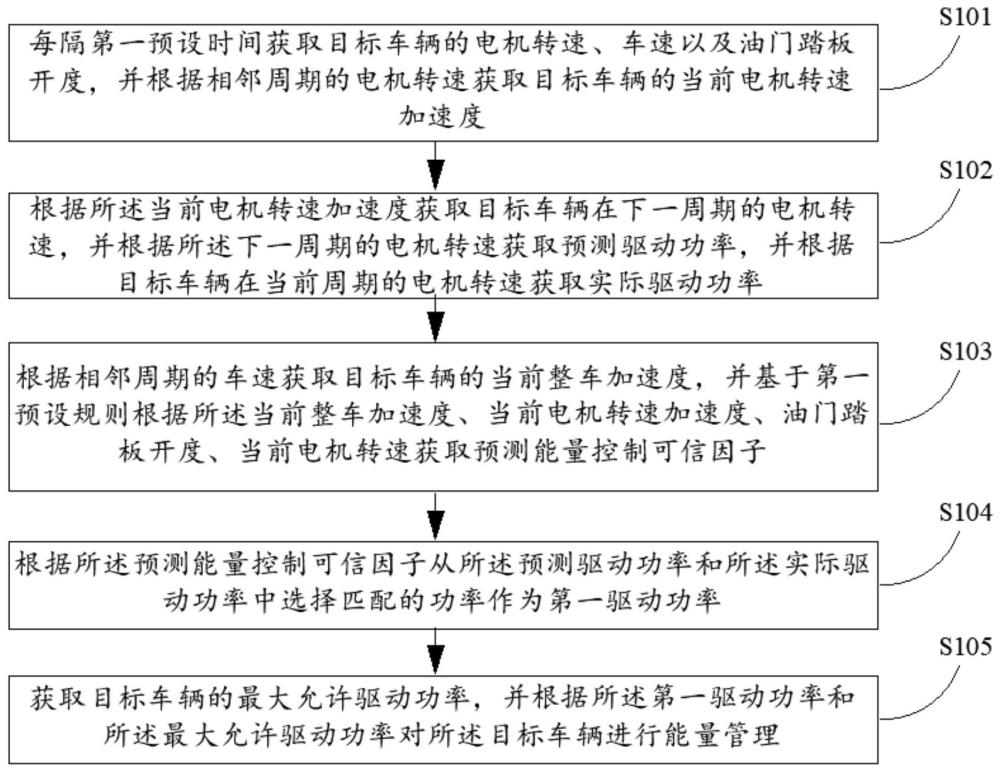
3、每隔第一预设时间获取目标车辆的电机转速、车速以及油门踏板开度,并根据相邻周期的电机转速获取目标车辆的当前电机转速加速度;
4、根据所述当前电机转速加速度获取目标车辆在下一周期的电机转速,并根据所述下一周期的电机转速获取预测驱动功率,并根据目标车辆在当前周期的电机转速获取实际驱动功率;
5、根据相邻周期的车速获取目标车辆的当前整车加速度,并基于第一预设规则根据所述当前整车加速度、当前电机转速加速度、油门踏板开度、当前电机转速获取预测能量控制可信因子;
6、根据所述预测能量控制可信因子从所述预测驱动功率和所述实际驱动功率中选择匹配的功率作为第一驱动功率;
7、获取目标车辆的最大允许驱动功率,并根据所述第一驱动功率和所述最大允许驱动功率对所述目标车辆进行能量管理。
8、进一步地,所述根据相邻周期的电机转速获取目标车辆的当前电机转速加速度的步骤包括:
9、根据以下公式计算得到电机转速加速度:
10、
11、其中,表示第k个周期的电机转速加速度,表示第k个周期的电机转速,表示第k-1个周期的电机转速,t表示一个周期的时长。
12、进一步地,所述根据所述当前电机转速加速度获取目标车辆在下一周期的电机转速,并根据所述下一周期的电机转速获取预测驱动功率,并根据目标车辆在当前周期的电机转速获取实际驱动功率的步骤包括:
13、根据以下公式计算得到下一周期的目标车辆的电机转速:
14、
15、其中,表示k+1周期后的电机转速,表示修正因子;
16、根据以下公式计算得到预测驱动功率:
17、
18、其中,表示预测驱动功率,表示驾驶员请求扭矩;
19、根据以下公式计算得到实际驱动功率:
20、
21、其中,表示实际驱动功率。
22、进一步地,所述根据相邻周期的车速获取目标车辆的当前整车加速度,并基于第一预设规则根据所述当前整车加速度、当前电机转速加速度、油门踏板开度、当前电机转速获取预测能量控制可信因子的步骤包括:
23、当油门踏板开度大于第一油门开度阈值、且当前电机转速大于第一转速阈值、且当前电机转速加速度大于第一电机加速度阈值,且当前整车加速度小于第一整车加速度阈值,则设置第一预测能量控制可信因子;
24、当油门踏板开度小于第二油门开度阈值、或当前电机转速小于第二转速阈值、或当前电机转速加速度小于第二电机加速度阈值,或当前整车加速度大于第二整车加速度阈值,则设置第二预测能量控制可信因子。
25、进一步地,所述根据所述预测能量控制可信因子从所述预测驱动功率和所述实际驱动功率中选择匹配的功率作为第一驱动功率的步骤包括:
26、若预测能量控制可信因子为第一预测能量控制可信因子,则选择预测驱动功率作为第一驱动功率;
27、若预测能量控制可信因子为第二预测能量控制可信因子,则选择实际驱动功率作为第一驱动功率。
28、进一步地,所述获取目标车辆的最大允许驱动功率,并根据所述第一驱动功率和所述最大允许驱动功率对所述目标车辆进行能量管理的步骤包括:
29、获取所述最大允许驱动功率与所述第一驱动功率的功率差值,并判断所述功率差值是否小于或等于预设阈值;
30、若所述功率差值小于或等于预设阈值,则根据预设扭矩变化率和驾驶员请求扭矩获取目标请求扭矩,并根据所述目标扭矩对目标车辆进行能量管理。
31、进一步地,所述根据预设扭矩变化率和驾驶员请求扭矩获取目标需求扭矩的步骤包括:
32、根据以下公式获取目标请求扭矩:
33、=+
34、其中,表示目标请求扭矩,表示驾驶员请求扭矩,表示预设扭矩变化率。
35、另一方面,本发明提出一种新能源汽车能量控制系统,所述系统包括:
36、信息采集模块,用于每隔第一预设时间获取目标车辆的电机转速、车速以及油门踏板开度,并根据相邻周期的电机转速获取目标车辆的当前电机转速加速度;
37、功率获取模块,用于根据所述当前电机转速加速度获取目标车辆在下一周期的电机转速,并根据所述下一周期的电机转速获取预测驱动功率,并根据目标车辆在当前周期的电机转速获取实际驱动功率;
38、可信因子获取模块,用于根据相邻周期的车速获取目标车辆的当前整车加速度,并基于第一预设规则根据所述当前整车加速度、当前电机转速加速度、油门踏板开度、当前电机转速获取预测能量控制可信因子;
39、功率选择模块,用于根据所述预测能量控制可信因子从所述预测驱动功率和所述实际驱动功率中选择匹配的功率作为第一驱动功率;
40、能量管理模块,用于获取目标车辆的最大允许驱动功率,并根据所述第一驱动功率和所述最大允许驱动功率对所述目标车辆进行能量管理。
41、本发明另一方面还提供一种可读存储介质,包括所述可读存储介质存储一个或多个程序,该程序被执行时实现如上述的新能源汽车能量控制方法。
42、本发明另一方面还提供一种电子设备,所述电子设备包括存储器和处理器,其中:
43、所述存储器用于存放计算机程序;
44、所述处理器用于执行所述存储器上所存放的计算机程序时,实现如上述的新能源汽车能量控制方法。
45、综上,根据上述的新能源汽车能量控制方法,能够很好的实现车辆打滑时驱动功率的控制,通过预测驱动功率和设置可信因子,以提供了一种高可靠性的能量管理控制方案,保证电池实际放电功率不会超过电池最大允许放电功率,进而提升电动汽车或者混动汽车的车辆安全性,并提升车辆打滑时的驾驶性。
46、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实施例了解到。
- 还没有人留言评论。精彩留言会获得点赞!