一种混合驱动的高温超导磁悬浮履带车及其驱动方法与流程
本发明属于履带车,具体涉及一种混合驱动的高温超导磁悬浮履带车及其驱动方法。
背景技术:
1、传统履带式车辆依靠发动机、电机作为动力系统,动力传动则需要通过传动机构向主动轮进行传递,主动轮通过与履带的啮合拖动履带依靠履带与地面的摩擦力,实现车辆的行驶。该过程中的动力传递损失较大,且行驶速度也受到限制。同时,车辆负重轮与下层履带板直接接触并承担车辆全部重量,增大了传统履带式车辆的摩擦损耗。同时,近些年随着能源需求与环境资源之间的矛盾愈发突出,电驱车辆由于其自身环保、节能等优势逐渐成为公路运载领域研究的热点。在此背景下,国内外学者提出了多种磁悬浮电驱履带车的设计方案,悬浮方式以电磁悬浮为主,充分利用对电磁体电流调节,实现电磁体与永磁体之间形成的悬浮力控制。
2、但现有的履带车的驱动系统仍然采用驱动轮驱动履带,驱动形式单一,履带与驱动轮之间的摩擦未能减少,节能空间有限。
技术实现思路
1、针对现有技术中但现有的履带车的驱动系统仍然采用驱动轮驱动履带,驱动形式单一,履带与驱动轮之间的摩擦未能减少,节能空间有限的问题,本发明提供了一种混合驱动的高温超导磁悬浮履带车及其驱动方法。
2、本发明采用的技术方案如下:
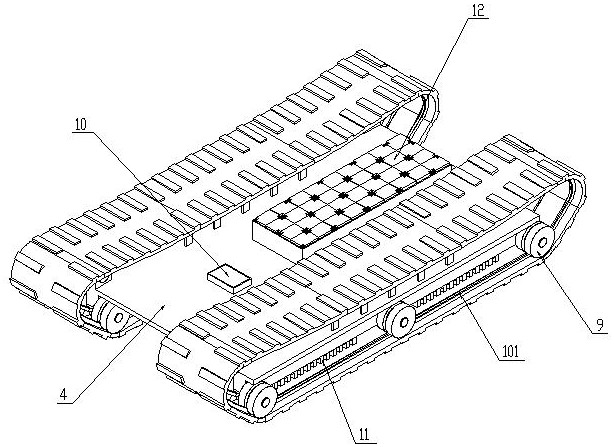
3、一种混合驱动的高温超导磁悬浮履带车,包括车体,车体上设置有履带,所述车体与履带之间设置有磁悬浮系统和履带推进系统,所述车体上还设置有张紧推进系统;
4、所述磁悬浮系统用于使车体在履带上悬浮,所述磁悬浮系统包括设置履带上的第一永磁体组,所述车体上设置有与第一永磁体组配合的悬浮磁体;
5、所述履带推进系统用于车体在履带上悬浮时推进履带移动;
6、所述张紧推进系统包括设置在每个履带两端上部弯曲处的引导超导组件和驱动超导组件,所述引导超导组件与第一永磁体组配合对履带弯曲处进行支撑,所述驱动超导组件与第一永磁体组配合推动履带向车体下方移动。
7、采用该技术方案后,本发明提出一种以直线电机驱动为主,高温超导悬浮力驱动为辅的履带车混合驱动形式,以高温超导悬浮力驱动作为动力源之一,动力输出更平稳、可靠,增加动力系统冗余。
8、作为优选,所述张紧推进系统包括设置在车体上部的四个支撑机构,四个支撑机构分别设置在每个履带两端的上部弯曲处,所述引导超导组件连接在支撑机构的端部,且所述引导超导组件靠近履带的一侧设置为弧面,所述驱动超导组件设置在引导超导组件的下方,所述驱动超导组件靠近履带的一侧为向靠近车体的一侧倾斜设置的平面。
9、采用该技术方案后,用高温超导悬浮系统取代传统履带车张紧引导轮,并置于传统履带车张紧引导轮相同位置,一方面起到张紧引导轮作用;另一方面,可以利用高温超导悬浮系统的横向约束有效制约车辆横摆,提高车辆的行驶稳定性;更重要的是,张紧引导轮位置处的高温超导悬浮系统还可以起到推送履带的作用,一定程度辅助履带车驱动行驶。
10、作为优选,所述支撑机构包括连接在车体上的液压伸缩转动装置,所述液压伸缩转动装置包括液压伸缩杆,所述液压伸缩杆与引导超导组件连接。
11、采用该技术方案后,在车辆运行过程中,由于车身高度的变化或者受到路面不平顺等的激励,履带的张紧度也会随之受影响,过于松弛的履带在运动中会出现跳振或者脱轨,过紧的履带会增加车辆行驶的阻力。由液压伸缩转动装置和引导超导组件构成的张紧系统可以实现履带张紧的可调。引导超导组件通过液压伸缩杆与液压伸缩转动装置连接,液压伸缩转动装置实现伸缩运动与绕车体连接点转动带动引导超导组件的横向与垂向位置移动,实现履带张紧可调,同时引导超导组件下方的驱动超导组件同样通过液压伸缩杆与液压伸缩转动装置连接,其与履带之间可以产生悬浮力从而推动实现履带的自铺轨运动。
12、作为优选,所述驱动超导组件与引导超导组件或支撑机构连接。
13、作为优选,所述驱动超导组包括驱动杜瓦,所述引导超导组件包括引导杜瓦,所述驱动杜瓦和引导杜瓦内均设置有高温超导块,且驱动杜瓦和引导杜瓦均连接有冷却介质输送机构。
14、作为优选,所述磁悬浮系统包括设置在履带内表面上的支撑块,所述第一永磁体组由数块第一永磁体组成,数块第一永磁体均匀排列在支撑块远离履带的一侧,所述悬浮磁体包括设置在车体上与第一永磁体组对应处的悬浮杜瓦。
15、采用该技术方案后,通过第一永磁体组与悬浮杜瓦配合使车体在履带上悬浮起来,采用高温超导磁悬浮技术使得车身与履带之间实现较小摩擦,解决传统履带式车辆动力传递损失较大、摩擦损耗大且行驶速度受到限制的缺陷。
16、作为优选,所述履带推进系统为直线电机推进系统,所述直线电机推进系统包括设置在支撑块两侧的两个第二永磁体组,每个第二永磁体组均由数个第二永磁体组成,两个所述第二永磁体组作为直线电机推进系统的直线电机次级,所述车体上与第二永磁体组位置相对处设置有直线电机推进系统的直线电机初级。
17、作为优选,所述支撑块包括横向支撑板和连接横向支撑板与履带的纵向支撑板,所述横向支撑板和与纵向支撑板共同组成横截面为t形的支撑块,两个所述第二永磁体组分别嵌设在纵向支撑板的两侧,所述第一永磁体组嵌设在横向支撑板的上表面。
18、采用该技术方案后,针对磁悬浮列车采用的直线电机,其采用的直线电机初级绕组沿轨道或者轨道两侧的墙体铺设,直线电机次级安装在车体上,将直线电机运用到履带车上其布置空间更加局限,因此将支撑块设置为t字型结构,集成悬浮与驱动系统的设计,实现最大限度合理运用空间。两个第二永磁体组分别嵌设在纵向支撑板的两侧,使第二永磁体组与第一永磁体组间距足够大,以减小第二永磁体组和第一永磁体组之间的相互影响。
19、作为优选,所述车体的两侧各设置有一个下支撑轮组,每个所述下支撑轮组分别位于两个履带的环形结构之间,每个下支撑轮组均至少由两列对称设置在车体上的下支撑轮组成,所述下支撑轮分别设置在磁悬浮系统的两侧。
20、采用该技术方案后,将磁悬浮系统设置在履带中部,在高温超导磁悬浮系统的两侧各设置有至少一列下支撑轮,可将高温超导磁悬浮系统限位在两列下支撑轮之间的区域,提高装置的整体性和稳定性。
21、作为优选,每个所述履带上均设置有诱导齿,所述下支撑轮上设置有与诱导齿配合的限位槽,所述限位槽的深度大于诱导齿的高度,且下支撑轮的悬浮位移量小于诱导齿的高度。
22、采用该技术方案后,限位槽的深度大于诱导齿的高度可使车体未悬浮时下支撑轮的轮面与履带接触,而诱导齿的端面与限位槽的底部不接触,使受力更加均匀;下支撑轮的悬浮位移量小于诱导齿的高度可使诱导齿始终位于限位槽内,避免其脱离限位槽。
23、一种混合驱动的高温超导磁悬浮履带车的驱动方法, 包括以下步骤:
24、步骤a:通过磁悬浮使车体在履带上悬浮起来;
25、步骤b:通过履带推进系统带动车体下方的履带向前进方向的相反侧移动,同时通过引导超导组件与第一永磁体组配合对履带弯曲处进行支撑,实现履带的0摩擦转向;通过前进侧的驱动超导组件与第一永磁体组配合带动履带向车体下方移动,完成混合驱动。
26、作为优选,步骤b中驱动超导组件与第一永磁体组配合带动履带向车体下方移动的具体过程为:驱动超导组件靠近履带的一侧为斜面,所述斜面向靠近车体的一侧倾斜设置,当履带推进系统向带动履带运动时,驱动超导组件提供斜向下的牵引力,从而带动履带向车体下方移动。
27、综上所述,由于采用了上述技术方案,本发明的有益效果是:
28、1. 本发明提出一种以直线电机驱动为主,高温超导悬浮力驱动为辅的履带车混合驱动形式,以高温超导悬浮力驱动作为动力源之一,动力输出更平稳、可靠,增加动力系统冗余。用高温超导悬浮系统取代传统履带车张紧引导轮,并置于传统履带车张紧引导轮相同位置,一方面起到张紧引导轮作用;另一方面,可以利用高温超导悬浮系统的横向约束有效制约车辆横摆,提高车辆的行驶稳定性;更重要的是,张紧引导轮位置处的驱动超导组件还可以起到推送履带的作用,一定程度辅助履带车驱动行驶。
29、2. 通过驱动超导组件也可实现履带向车体下方的自动铺设,实现自辅轨式运行。
30、3. 本发明通过第一永磁体组与悬浮杜瓦配合使车体在履带上悬浮起来,采用高温超导磁悬浮技术使得车身与履带之间实现较小摩擦,解决传统履带式车辆动力传递损失较大、摩擦损耗大且行驶速度受到限制的缺陷。
31、4. 针对磁悬浮列车采用的直线电机,其采用的直线电机初级绕组沿轨道或者轨道两侧的墙体铺设,直线电机次级安装在车体上,将直线电机运用到履带车上其布置空间更加局限,因此将支撑块设置为t字型结构,集成悬浮与驱动系统的设计,实现最大限度合理运用空间。
- 还没有人留言评论。精彩留言会获得点赞!