一种坡道起步驱动控制方法及系统与流程
本发明涉及车辆控制,尤其涉及一种坡道起步驱动控制方法及系统。
背景技术:
1、商用电动车时常面临负载变化大、路况恶劣、山地运行频繁等情况,坡道起步是一种常见的工况,特别是在车辆重载后,坡道阻力更大,起步难度增加。
2、在一般坡道起步过程中,往往依赖驾驶员快速踩大油门来解析出大扭矩,以此来实现坡道起步,这个过程对驾驶员的驾驶经验要求较高,在车辆重载加载后坡道阻力更大,起步的难度会更大;也有利用刹车的卡钳压力和车辆输出扭矩配合来实现起步,在输出扭矩增大的过程中逐渐卸除掉刹车压力,控制车辆进行起步。
3、一般情况下,整车控制中往往通过油门解析扭矩与peb(手刹)释放的设定扭矩门槛相比较来松开手刹,手刹释放后完全依赖驾驶员踩大油门来克服坡道阻力,若peb手刹松刹车扭矩阈值设置不合理,或者peb采用了油门阈值,驾驶员起步一旦操作不当或在输出扭矩尚小的情况提前解锁peb,很容易便出现溜坡现象。
4、在制动刹车压力与输出扭矩配合的过程中,输出扭矩过程中刹车压力尚未完全卸除掉,容易对刹车盘造成一定的损伤,同时控制液压的方式实现刹车压力有一定的延迟也增加了控制难度,很容易出现起步不够平顺的情况。
技术实现思路
1、本发明公开了一种坡道起步驱动控制方法及系统,旨在解决现有技术中存在的技术问题。
2、本发明采用下述技术方案:
3、第一方面,本发明实施例提供了一种坡道起步驱动控制方法,包括:
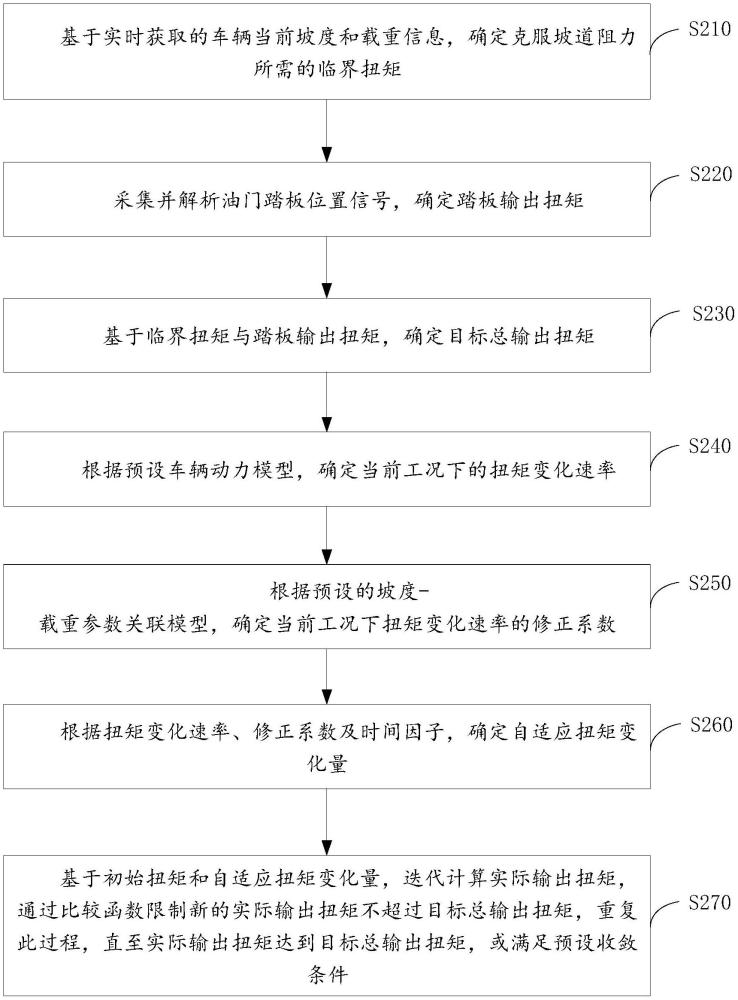
4、基于实时获取的车辆当前坡度和载重信息,确定克服坡道阻力所需的临界扭矩;
5、采集并解析油门踏板位置信号,确定踏板输出扭矩;
6、基于临界扭矩与踏板输出扭矩,确定目标总输出扭矩;
7、根据预设车辆动力模型,确定当前工况下的扭矩变化速率;
8、根据预设的坡度-载重参数关联模型,确定当前工况下扭矩变化速率的修正系数;
9、根据扭矩变化速率、修正系数及时间因子,确定自适应扭矩变化量;
10、基于初始扭矩和自适应扭矩变化量,迭代计算实际输出扭矩,通过比较函数限制新的实际输出扭矩不超过目标总输出扭矩,重复此过程,直至实际输出扭矩达到目标总输出扭矩,或满足预设收敛条件。
11、作为优选的技术方案,在根据预设车辆动力模型,确定当前工况下的扭矩变化速率的步骤之前,还包括:
12、实时持续采集车辆的当前坡度和车速信息;
13、当检测到坡度信息超过预设的激活阈值,且持续预定时长,同时车速降至预设的速度阈值以下时,触发修正系数的确定步骤;
14、在触发条件满足后,持续迭代计算实际输出扭矩,直至满足退出条件。
15、作为优选的技术方案,退出条件的判断包括:
16、实时持续采集车辆的当前坡度和车速信息;
17、当检测到坡度信息降低至预设的退出阈值以下时,触发修正系数的渐变退出步骤。
18、作为优选的技术方案,修正系数的渐变退出步骤包括:
19、根据预设的渐变退出函数,动态调整修正系数,使其平滑回归至初始值;
20、当修正系数完全回归至初始值后,终止修正系数的确定步骤,恢复常规控制模式。
21、作为优选的技术方案,在确定克服坡道阻力所需的临界扭矩的步骤中,包括:
22、分别获取车辆的质量、当前坡道的坡度、车辆轮胎滚动半径;
23、根据标准重力加速度常数,计算车辆在当前坡道上的重力分量;
24、基于重力分量、坡度及车辆轮胎滚动半径,根据预设的临界扭矩计算函数,确定临界扭矩。
25、作为优选的技术方案,在采集并解析油门踏板位置信号,确定踏板输出扭矩的步骤中,包括:
26、实时获取油门踏板的当前位置信号;
27、将当前位置信号转换为踏板开度百分比;
28、基于预设的油门踏板开度与输出扭矩的关联模型,将踏板开度百分比映射为相应的踏板输出扭矩。
29、作为优选的技术方案,目标总输出扭矩配置为临界扭矩与踏板输出扭矩之和。
30、作为优选的技术方案,在根据预设车辆动力模型,确定当前工况下的扭矩变化速率的步骤中,包括:
31、实时采集车辆的油门开度和车速信息;
32、将油门开度和车速信息输入预设的油门开度-车速参数关联模型,油门开度-车速参数关联模型存储有不同油门开度和车速组合对应的扭矩变化速率值;
33、根据当前采集的油门开度和车速,在油门开度-车速关联模型中进行插值计算,得到与当前工况匹配的扭矩变化速率。
34、作为优选的技术方案,在根据预设的坡度-载重参数关联模型,确定当前工况下扭矩变化速率的修正系数的步骤中,包括:
35、实时采集车辆的当前坡度和载重信息;
36、将当前坡度和载重信息输入预设的坡度-载重参数关联模型,坡度-载重参数关联模型存储有不同坡度和载重组合对应的修正系数;
37、根据当前采集的坡度和载重信息,在坡度-载重参数关联模型中进行插值计算,得到与当前工况匹配的修正系数。
38、作为优选的技术方案,在根据扭矩变化速率、修正系数及时间因子,确定自适应扭矩变化量的步骤中,包括:
39、获取车辆的加速时间;
40、将当前工况下的扭矩变化速率、修正系数与加速时间进行相乘运算,得到自适应扭矩变化量。
41、作为优选的技术方案,在基于初始扭矩和自适应扭矩变化量,迭代计算实际输出扭矩的步骤中,包括:
42、获取初始扭矩;
43、在每个迭代周期内,将初始扭矩与自适应扭矩变化量相加,得到实际输出扭矩。
44、第二方面,本发明实施例提供了一种坡道起步驱动控制系统,包括:
45、临界扭矩确认模块,用于基于实时获取的车辆当前坡度和载重信息,确定克服坡道阻力所需的临界扭矩;
46、踏板输出扭矩确认模块,用于采集并解析油门踏板位置信号,确定踏板输出扭矩;
47、目标总输出扭矩确认模块,用于基于临界扭矩与踏板输出扭矩,确定目标总输出扭矩;
48、扭矩变化速率确认模块,用于根据预设车辆动力模型,确定当前工况下的扭矩变化速率;
49、修正系数确认模块,用于根据预设的坡度-载重参数关联模型,确定当前工况下扭矩变化速率的修正系数;
50、自适应扭矩变化量确认模块,用于根据扭矩变化速率、修正系数及时间因子,确定自适应扭矩变化量;
51、实际输出扭矩计算模块,用于基于初始扭矩和自适应扭矩变化量,迭代计算实际输出扭矩,通过比较函数限制新的实际输出扭矩不超过目标总输出扭矩,重复此过程,直至实际输出扭矩达到目标总输出扭矩,或满足预设收敛条件。
52、上述发明中的一个实施例具有如下优点或有益效果:
53、本发明主要提供了一种坡道起步驱动控制方法与系统,通过该控制方法,可以根据车辆的当前工况判断是否进行扭矩的修正,当坡道大于一定阈值且车速低于一定阈值时,自动进入扭矩的修正,在对扭矩进行修正时,分别确定当前工况下的扭矩变化速率及其修正系数,通过该修正系数,可以实现在有坡度的工况下让驾驶员有如履平地的驾驶感受,动力响应也会加快,在踩小油门的时候便可以实现车辆坡道起步,并且在不同车重和坡度下具有良好的工况适应性,消除驾驶员大坡度和重载下的起步紧张感,提高车辆安全性,当坡道小于一定阈值时,按照一定的斜率让修正系数回归到1,渐进式退出修正功能,恢复至正常的驱动控制模式。
- 还没有人留言评论。精彩留言会获得点赞!