一种基于道路环境交通风险场识别的主车运行控制方法
本发明涉及道路交通安全领域,尤其涉及一种基于道路环境交通风险场识别的主车运行控制方法。
背景技术:
1、随着汽车产业的快速发展,汽车的运行控制相关研究越来越受到重视,汽车的运行控制对行驶过程的安全性和稳定性有至关重要的影响,这也是重点研究方向。而车辆在行驶过程中,经常遇到换道、超车、减速等异常驾驶行为车辆,这些车辆带来极大的道路交通风险并严重干扰主车的行车安全,因此针对这些异常驾驶行为车辆开展基于道路环境交通风险场识别行车风险的车辆运行控制研究很有必要。
2、现有的车辆运行控制方法大多是根据车辆的位置、车速等行驶状态信息按照一定策略控制车辆进行加速、减速及转向等操作,使得车辆以期望的轨迹和速度行驶,以达到安全行驶的目的。但现有相关车辆控制的研究大多都基于单向的车辆的横向控制或车辆的纵向控制,这些研究往往只考虑了主车的运行状态而忽略了道路环境中异常驾驶行为车辆所带来的风险,且现有技术中利用行车风险场及风险等级表对车辆进行横纵向协同控制的策略少,存在异常驾驶行为类型识别不准确、行车风险等级识别不明确、控制效果差等问题。因此,本发明提出了一种基于道路环境交通风险场识别的主车运行控制方法,在考虑道路环境交通风险场的基础上对主车实现横纵向协同控制以此规避风险,对车辆控制技术的发展有重要意义。
技术实现思路
1、本发明公开了一种基于道路环境交通风险场识别的主车运行控制方法,旨在解决现有技术中利用行车风险场及风险等级表对车辆进行横纵向协同控制的策略少、异常驾驶行为类型识别不准确、行车风险等级识别不明确、控制效果差的问题。
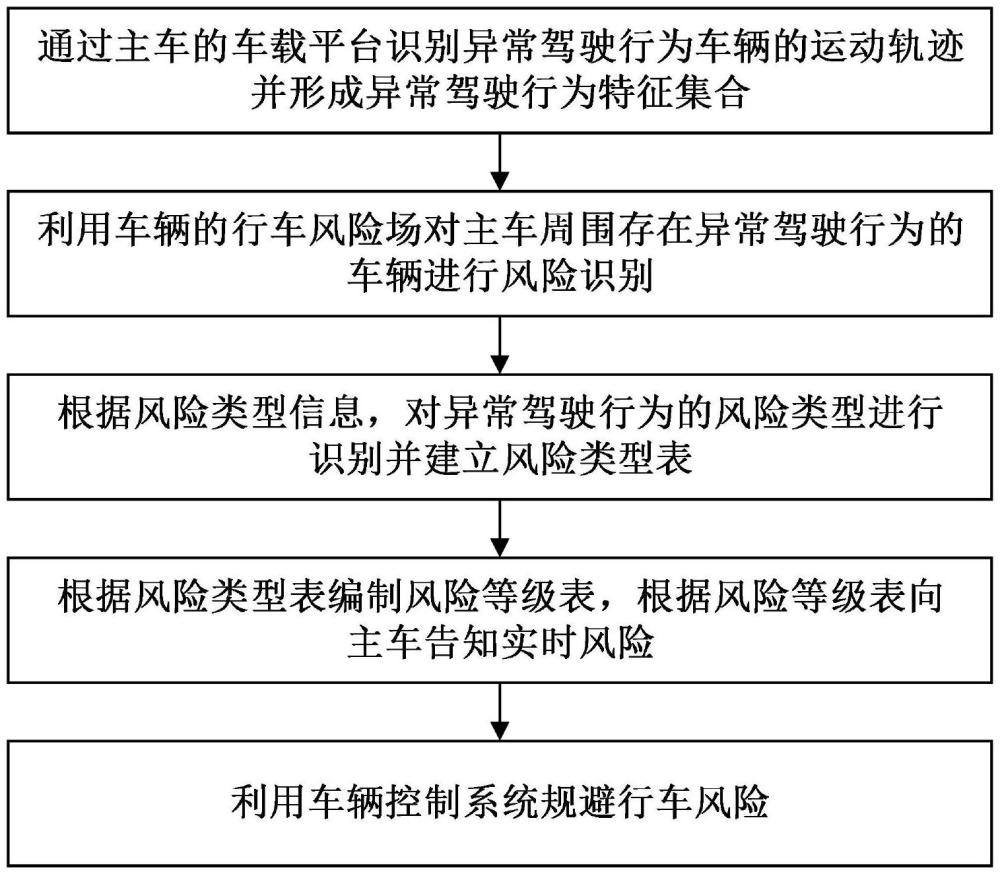
2、为达到上述目的,本发明公开了一种基于道路环境交通风险场识别的主车运行控制方法,具体包括以下步骤:
3、s1、通过主车的车载平台识别异常驾驶行为车辆的运动轨迹并形成异常驾驶行为特征集合;
4、所述异常驾驶行为包括:换道(cl)、超车(ot)、减速(sc);
5、所述异常驾驶行为特征集合包括:异常驾驶行为详情(adb),异常驾驶行为发生位置详情(l-adb);其中,adb包含:异常驾驶行为类型(adb-t),起始时间(adb-t),结束时间(adb-s);l-adb包含:经度(l-adb-l),纬度(l-adb-la),速度(l-adb-v),时间(l-adb-t),车身间距大小(l-adb-sb),交互风险场的场势(l-adb-pf);
6、进一步的,当车辆处于换道(cl)时,adb-t=cl,在l-adb中,取adb-t<l-adb-t<adb-s时间段外,前车的l-adb-l和l-adb-la与主车位于不同车道,且两车的l-adb-v和l-adb-sb保持不变;取adb-t<l-adb-t<adb-s时间段内,前车的l-adb-l和l-adb-la发生偏移且l-adb-v逐渐增大或减小,主车与前车的l-adb-sb不断增大或减小,直到前车与主车位于同一车道;
7、即当主车与前车位于不同车道时,前车发生横向偏移并有加速或减速,之后两车的间距变大或变小且位于同一车道时,识别为换道异常驾驶行为;
8、进一步的,当车辆处于超车(ot)时,adb-t=ot,在l-adb中,取adb-t<l-adb-t<adb-s时间段外,后车的l-adb-l和l-adb-la与主车位于不同车道,且两车的l-adb-v和l-adb-sb保持不变;取adb-t<l-adb-t<adb-s时间段内,后车的l-adb-l和l-adb-la发生偏移且l-adb-v逐渐增大,此后两车的l-adb-sb不断减小且当主车与后车的l-adb-la相同时,两车的l-adb-sb达到最小,之后两车的l-adb-sb不断增大,此时后车超越主车且后车的l-adb-l和l-adb-la发生偏移且l-adb-v逐渐增大,直到两车位于同一车道;
9、即当主车与后车位于不同车道时,后车运动轨迹发生横向偏移并有加速行为,两车并行时间距达最小,之后两车间距增大且后车运动轨迹发生横向偏移并有加速行为,此时后车与主车位于同一车道,识别为超车异常驾驶行为;
10、进一步的,当车辆处于减速(sc)时,adb-t=sc,在l-adb中,取adb-t<l-adb-t<adb-s时间段内,主车与前车的l-adb-l和l-adb-la保持不变且两车的l-adb-l相同,此时两车的l-adb-sb不断减小且l-adb-l不变;
11、即当主车与前车在同一车道,两车间距急剧减小且前车运动轨迹未发生偏移时,则识别为减速异常驾驶行为;
12、s2、利用车辆的行车风险场对主车周围存在异常驾驶行为的车辆进行风险识别;
13、其中,所述行车风险场指道路上运动物体对行车风险影响程度的动能场,其中,单个车辆的行车风险场定义为单车风险场,主车与主车周围车辆之间的行车风险场定义为交互风险场;
14、所述单车风险场的具体表达式如下所示:
15、
16、
17、
18、式中:xi、yi为单个车辆i的横坐标和纵坐标,xk、yk为点k的横坐标和纵坐标;x轴沿车辆行驶方向,y轴沿与车辆行驶方向垂直的方向;pf为单个车辆i运动时对周围环境产生的潜在危险程度,场强越大,表示潜在危险越大;场强方向与rik相同;rik为单个车辆i到点k的伪间距大小;pi为道路条件影响因子,mi为单个车辆i的等效质量;mi为单个车辆i的真实质量;vi为单个车辆i的运动速度;θi为单个车辆i的运动方向与rik的夹角;ai为单个车辆i的加速度;λ1取0.056;λ2取-0.169;λ3取2;α取0.029;τ取2.717;
19、所述交互式风险场的具体表达式如下:
20、
21、
22、qj=mjexp(-λ4vjcosφj)
23、
24、式中:xi、yi为主车周围车辆i的横坐标和纵坐标,xj、yj为主车j的横坐标和纵坐标;pf-ji为主车j与主车周围车辆i的交互风险场风险势能大小,风险势能越大,表示主车与周围车辆之间的潜在危险越大;fji为主车所受场力;qj为主车j的特征系数;pi为(xi,yi)处的道路条件影响因子,mi为主车周围车辆i的等效质量;mj为主车j的等效质量;vi为主车周围车辆i的运动速度;vj为主车j的运动速度;rji为主车j与主车周围车辆i的伪间距大小;θi为主车周围车辆i的运动方向与rji的夹角;φj为主车j的运动方向与rji的夹角;λ1取0.056;λ2取-0.169;λ3取2;λ4取-0.029;α取0.029;τ取2.717;
25、通过交互式风险场来预测主车与周围车辆之间的潜在风险;
26、s3、根据风险类型信息,对异常驾驶行为的风险类型进行识别并建立风险类型表;
27、所述风险类型信息(adb-rti)包含:风险类型(adb-rti-rt)、交互风险场场势阈值(adb-rti-pi(i=1,2,3));
28、判断的风险类型结果分为:轻微(sl)、一般(or)、严重(se)三种类型;
29、在风险类型信息(adb-rti)中,adb-rti-p1=0.0003为划分adb-rti-rt=sl的场势阈值;adb-rti-p2=0.003为划分adb-rti-rt=or的场势阈值;adb-rti-p3=0.03为划分adb-rti-rt=se的场势阈值;
30、所述风险类型表如下表1:
31、表1风险类型表
32、
33、s4、依据风险类型表编制风险等级表,根据风险等级表向主车告知实时风险;
34、所述风险等级表中风险等级信息(adb-rli)中,风险级别(adb-rli-rl)包括:低级(ll)、中级(il)、高级(hl);
35、风险等级表包括:风险等级矩阵表、风险等级接受表;
36、根据风险等级矩阵表规定风险等级标准,风险等级矩阵表见下表2;
37、表2风险等级矩阵表
38、
39、根据风险等级接受准则表说明当前风险等级及对应接受情况,风险等级接受准则表如下表3;
40、表3风险等级接受准则表
41、 风险等级 字段 接受水平 应对措施 低级 adb-rli-rl=ll 可以接受 需准备随时调整应对措施 中级 adb-rli-rl=il 有条件接受 需采取一定措施 高级 adb-rli-rl=hl 不可接受 需立即施行应对措施
42、根据风险等级表,对异常驾驶行为特征集合进行风险类型识别和风险等级划分,风险等级表见下表4;
43、表4风险等级表
44、
45、s5、利用车辆控制系统规避行车风险;
46、所述车辆控制系统包括:横向控制器、纵向控制器;其中,横向控制器为方向盘转向控制器,以方向盘的转角角度和速率进行控制;纵向控制器为油门踏板控制器和刹车踏板控制器,以踏板的开合程度进行控制;
47、车辆控制系统利用不同的工作模式对控制器进行控制,工作模式分为a档、b档、c档;
48、具体来说,当车辆控制系统进入a档工作模式时,纵向控制器主动制动控制,对应风险等级为低级;当车辆控制系统进入b档工作模式时,横向控制器主动转向控制,对应风险等级为中级;当车辆控制系统进入c档工作模式时,对应风险等级为高级,车辆进入预碰撞主动制动状态,以最大制动强度减速停车。
49、工作模式响应如下表5所示;
50、表5工作模式响应表
51、
52、即当adb-t=cl、ot、sc时,在l-adb中,取adb-t<l-adb-t<adb-s时间段内,若l-adb-pf=adb-rti-p1,则车辆控制系统处于进入工作模式临界状态,触发声光报警,提醒驾驶员谨慎驾驶;
53、若adb-rti-p1<l-adb-pf<adb-rti-p2,则adb-rti-rt=sl、adb-rli-rl=ll,说明两车的l-adb-sb大于最晚制动点(l-adb-lptb),若驾驶员无有效输入,车辆控制系统进入a档工作模式,即纵向控制器主动制动控制;
54、若adb-rti-p2≤l-adb-pf<adb-rti-p3,则adb-rti-rt=or、adb-rli-rl=il,说明两车的l-adb-sb小于最晚制动点(l-adb-lptb),大于最晚转向点(l-adb-lpts),且目标车道存在足够空间,若驾驶员无有效输入,车辆控制系统进入b档工作模式,横向控制器主动转向控制;
55、若adb-rti-p3≤l-adb-pf,则adb-rti-rt=se、adb-rli-rl=hl,说明两车的l-adb-sb小于最晚转向点l-adb-lpts且目标车道无足够空间,车辆控制系统进入c档工作模式,车辆进入预碰撞主动制动状态,以最大制动强度减速停车;
56、控制原则为优先采用纵向控制器进行制动,当仅通过纵向主动制动无法完成避险时,再采用横向控制器主动转向;同时驾驶员的控制权优先级更高,即在主动制动或主动转向过程中,若驾驶员存在加速、制动或转向等与系统工作逻辑不符的操作,系统随即退出工作,将控制权交还给驾驶员;
57、优选的,车辆控制系统中的纵向控制器对车辆进行主动制动控制,纵向控制器采用分层式控制设计,包括:基于lqr算法的上层控制器,求解用于下层控制输入的期望加速度;基于加速度反馈的pid控制方法的下层控制器;其中,上层控制器包含建立状态空间方程和计算期望加速度两个步骤;
58、所述建立状态空间方程步骤通过车辆的当前速度vx和期望速度vdes为输入,推导车辆的当前加速度ax和期望加速度ades的状态空间方程;
59、所述计算期望加速度步骤基于建立的状态空间方程,求出车辆的期望加速度ades;
60、由车辆的当前速度vx和期望速度vdes可求得速度误差εv为:
61、εv=vdes-vx
62、车辆在纵向控制过程中,其当前加速度与期望加速度满足一阶惯性关系,传递函数表达式为:
63、
64、式中:kl为控制系统增益;τdel为系统延迟时间。
65、状态量x=[εvax]t,控制量u=[ades],可得状态空间方程为:
66、
67、式中:
68、二次型性能函数表达式为:
69、
70、式中:r=[r]
71、结合lqr理论知识,可得控制系统最优反馈为:
72、u=-r-1btp
73、其中p矩阵可由求解黎卡提方程pa+atp-pbr-1btp+q=0得出。
74、反馈增益矩阵k=[k1 k2],表达式为:
75、k=lqr(a,b,q,r)
76、式中:
77、因此,结合反馈增益矩阵k=[k1 k2]和系统状态量可得车辆的期望加速度ades为ades=-(k1εv+k2ax),其中k1和k2分别为反馈增益矩阵k的第一、二项数值;εv为速度误差;ax为当前加速度。
78、进一步的,通过采用基于加速度反馈的pid控制方法的下层控制器,输出油门踏板控制器和刹车踏板控制器的控制信息,通过油门—刹车标定表,实现按照期望速度行驶;
79、所述基于加速度反馈的pid控制方法的下层控制器,作用是将上层控制器输出的期望加速度转化为期望的油门开度和制动压力。
80、首先,采用“前馈+反馈”的方式对上层控制器输出的期望加速度进行控制,并引入pid控制算法进行调节;其次,通过纵向标定表的方式将加速度转换为期望的油门开度和制动压力。其中,纵向标定表表征了不同车速下的车辆对油门和制动响应特性,其输入为速度与期望加速度,输出为油门开度或制动压力值,数据经过插值后生成一张包含所有油门、刹车的标定表,使在任意给定的速度与加速度下,都有唯一的油门和刹车值与之对应。
81、进一步的,主车的发动机、变速器、制动系统基于纵向控制器和油门—刹车标定表输出信息进行响应;
82、所述的主车发动机、变速器、制动系统基于纵向控制器和油门—刹车标定表输出信息进行响应。具体实施方法中,纵向控制器和油门—刹车标定表输出的油门和踏板控制器信息输出到发动机,发动机与变速器连接;输出的刹车踏板控制器信息输出到制动装置。
83、优选的,车辆控制系统中的横向控制器对车辆进行主动转向控制,横向控制器为前馈lqr控制;
84、进一步的,通过轨迹跟踪误差模型基于期望轨迹和车辆状态参数计算车辆的误差参数err和轨迹曲率kr;
85、对期望路径进行轨迹跟踪时,存在横向误差ed和航向误差影响跟踪性能。横向误差ed为车身质心点位置到期望路径轨迹中心点的距离,航向误差为车身的航向角θ与期望轨迹中心点处切线的航向角θr之差,即车辆在行驶过程中的质心侧偏角β较小,且车身航向角θ与车辆的横摆角的关系为:则认为航向误差定义q点为车辆质心点在期望轨迹上的投影点,则在q点沿着期望轨迹移动的速度为:
86、
87、式中:ed为横向误差;为航向误差;kr为q点处期望轨迹的曲率;vx为纵向速度;vy为横向速度。
88、可得轨迹跟踪误差模型的空间状态表达式为其中
89、u=[δ]
90、式中:为误差参数的一阶导数;err为误差参数;ed为横向误差;为航向误差;为横向误差的一阶导数;为航向误差的一阶导数;为期望轨迹中心点处切线的航向角θr的一阶导数;δ为前轮转角;m为车辆质量;vx为纵向速度;a和b分别为车辆质心到前、后轴的距离;cf和cr分别为前后轮胎的侧偏刚度;iz为车辆质心绕z轴转动的转动惯量。
91、进一步的,lqr控制器得到控制器最优控制反馈矩阵及最优前轮转角控制律;
92、首先,使用欧拉法对lqr进行离散化处理,其次,构建系统的性能目标函数,确立最优控制输入u(k),使性能目标函数j取最小值。最终得到lqr控制器的最优控制为u(k)=-kx(k),其中k=(r+btpb)-1btpa为lqr控制器最优控制反馈矩阵,p为如下黎卡提方程pa+atp-pbr-1bpt+q=0的解,q为半正定实对称常数矩阵,r为正定实对称常数矩阵,r=[1]。最后在lqr控制器控制的线性系统中,u=δ,x=err,可得系统的最优前轮转角控制律为δ(k)=-kerr(k)。
93、进一步的,通过轨迹曲率kr和反馈矩阵k设计前馈控制器,算出前轮转角增量δf;前馈pso-lqr横向控制器输出最终的前轮转角控制量u(k)到输出至车辆的方向盘转角控制器,完成横向控制。
94、为消除稳态误差,需在lqr控制器上加一个前馈控制器,此时最优前轮转角控制律为u(k)=-kerr(k)+δf,其中δf为前馈控制器输出的前轮转角增量;当系统稳定后,可得稳态误差为:
95、
96、式中:k1和k3分别为lqr最优控制反馈矩阵k的第一、三项数值。
97、令ed=0消除稳态误差后,可得前馈控制器输出前轮转角增量δf为
98、当系统稳定,航向误差的稳态误差为能使航向误差θ-θr=0,此时可得最优前轮转角控制律u(k)为
99、本发明的有益效果
100、1、本发明利用道路环境交通风险场有效识别主车周围的异常驾驶行为车辆,根据风险等级表判定行车风险及向主车告知实时风险,并以此设计主车的横纵向协同控制系统,解决了现有技术中对异常驾驶行为车辆类型识别不准确、行车风险等级识别不明确、控制系统效果差等问题,本发明的控制方法能有效提高车辆横纵向控制的稳定性和安全性。
101、2、本发明的纵向控制器采用分层式控制设计,与现有纵向控制方法相比,本设计首先基于lqr算法的上层控制器求解出用于下层控制输入的期望加速度,其次设计基于加速度反馈的pid控制方法的下层控制器,设计了油门—刹车标定表输出油门和刹车踏板控制器的控制信息,实现主车按照期望速度行驶,从而实现纵向控制目标,能够降低纵向控制的难度,保证控制的实时性和有效性。
102、3、本发明的横向控制器充分考虑了车辆的误差参数和轨迹曲率,与现有横向控制技术相比,本设计首先通过lqr控制器得到最优前轮转角控制律并通过设计前馈控制器算出前轮转角增量,前馈lqr横向控制器输出最终的前轮转角控制量至方向盘转角控制器,从而完成主车横向控制。本设计能够使主车实际行驶轨迹与期望轨迹的误差快速缩小,并使得整个轨迹跟踪过程中车辆的稳定性较好,进一步提高了横向控制器的精度和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!