本发明涉及车辆控制领域,具体涉及一种车辆电机扭矩的控制方法、装置及车辆。
背景技术:
1、相比燃油车,电机动力系统的优势导致在低附着路面加速和滑行能量回收时驱动轮易打滑,通过减速带等路段时起跳车轮易滑转从而引起整车冲击前窜。而现有的常规控制方式中,轮速传感器采集转速信号传递给底盘控制器解析,底盘控制器再将控制信号传递给动力控制器,动力控制器向电机控制器发送请求,整个过程信号传递环节多,耗费时间长,无法及时有效地抑制驱动轮的打滑现象。
技术实现思路
1、有鉴于此,本发明实施例提供了一种车辆电机扭矩的控制方法、装置及车辆,以解决在电动车的运行中,常规的扭矩或转速控制方式因信号传递路径长、循环周期长,对驱动轮的打滑现象抑制效果不佳的问题。
2、第一方面,本发明实施例提供了一种车辆电机扭矩的控制方法,所述方法应用于车辆中的目标电机控制器,所述目标电机控制器为所述车辆中多个电机控制器中的任意一个,所述方法包括:
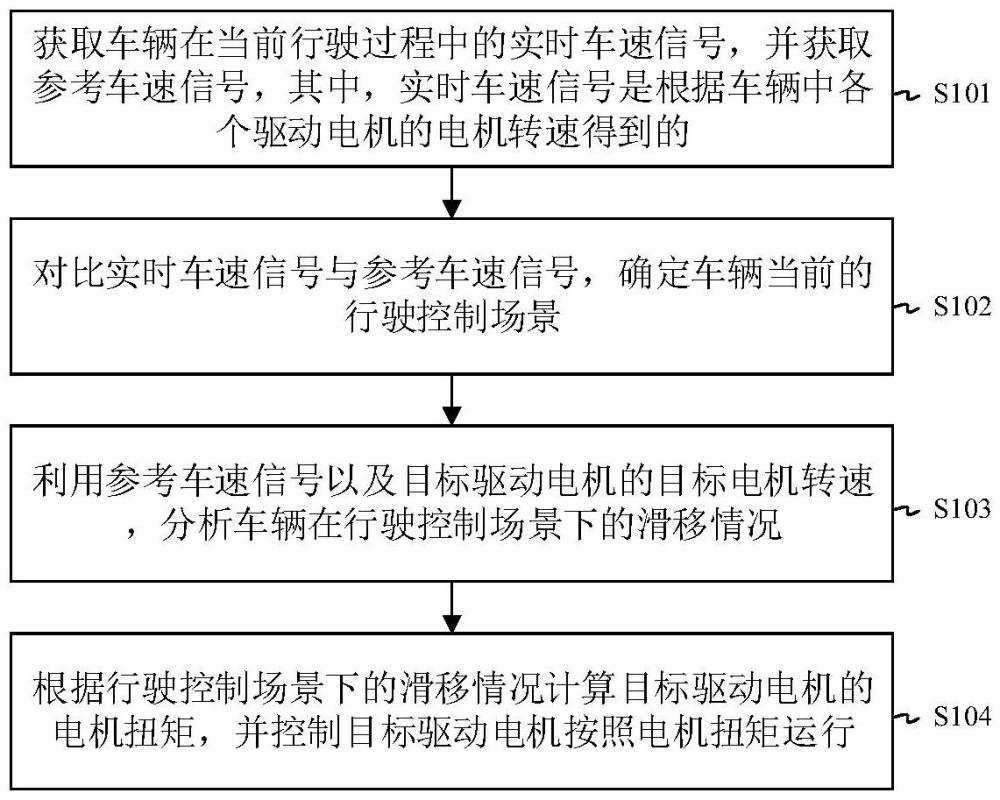
3、获取所述车辆在当前行驶过程中的实时车速信号,并获取参考车速信号,其中,所述实时车速信号是根据所述车辆中各个驱动电机的电机转速得到的;
4、对比所述实时车速信号与所述参考车速信号,确定所述车辆当前的行驶控制场景;
5、利用所述参考车速信号以及所述目标驱动电机的目标电机转速,分析所述车辆在所述行驶控制场景下的滑移情况;
6、根据所述行驶控制场景下的滑移情况计算所述目标驱动电机的电机扭矩,并控制所述目标驱动电机按照所述电机扭矩运行。
7、进一步的,所述获取所述车辆在当前行驶过程中的实时车速信号,包括:
8、获取所述目标驱动电机产生的第一电机转速信号,并获取所述车辆中除所述目标驱动电机之外其他驱动电机的第二电机转速信号;
9、基于所述第一电机转速信号以及所述第二电机转速信号计算所述实时车速信号。
10、进一步的,所述获取参考车速信号,包括:
11、接收所述车辆的动力控制器发送的参考车速信号,其中,所述参考车速信号为所述动力控制器中预设的车速信号,或所述动力控制器根据所述车辆的历史行驶数据计算得到的车速信号。
12、进一步的,所述对比所述实时车速信号与所述参考车速信号,确定所述车辆当前的行驶控制场景,包括:
13、获取所述实时车速信号中的最大信号值以及最小信号值;
14、对比所述参考车速信号的信号值以及所述最大信号值得到第一对比结果,或,对比所述参考车速信号的信号值与所述最小信号值得到第二对比结果;
15、基于所述第一对比结果或所述第二对比结果确定所述行驶控制场景。
16、进一步的,所述基于所述第一对比结果或所述第二对比结果确定所述行驶控制场景,包括:
17、若所述第一对比结果为所述参考车速信号的信号值小于所述最大信号值,则所述行驶控制场景为驱动场景;或,
18、若所述第二对比结果为所述参考车速信号的信号值大于所述最小信号值,则所述行驶控制场景为制动场景。
19、进一步的,所述利用所述参考车速信号以及所述目标驱动电机的目标电机转速,分析所述车辆在所述行驶控制场景下的滑移情况,包括:
20、若所述行驶控制场景为驱动场景,则基于预设电机转速与轮速之间的对应关系,确定所述目标电机转速对应的目标轮速,其中,所述目标轮速是车轮绕轴旋转的速度;
21、根据所述参考车速信号确定参考车速值;
22、获取所述车轮的滚动半径,并基于所述目标轮速,所述参考车速值以及所述滚动半径计算适时滑移率;
23、获取所述适时滑移率与目标滑移率之间的第一差值,并计算所述第一差值与所述适时滑移率之间的第一比值;
24、若所述第一比值大于第一预设值,则确定所述滑移情况为驱动打滑。
25、进一步的,所述基于所述目标轮速,所述参考车速值以及所述滚动半径计算适时滑移率,包括:
26、计算所述目标轮速与所述滚动半径之间的第一乘积,并计算所述第一乘积与所述参考车速值之间的第二差值;
27、将所述第二差值与所述目标轮速与所述滚动半径之间的乘积之间的比值作为所述适时滑移率。
28、进一步的,所述利用所述参考车速信号以及所述目标驱动电机的目标电机转速,分析所述车辆在所述行驶控制场景下的滑移情况,包括:
29、若所述行驶控制场景为制动场景,则基于预设电机转速与轮速之间的对应关系,确定所述目标电机转速对应的目标轮速,其中,所述目标轮速是车轮绕轴旋转的速度;
30、根据所述参考车速信号确定参考车速值,并获取所述车轮的滚动半径;
31、基于所述目标轮速,所述参考车速值以及所述滚动半径计算适时滑移率;
32、获取所述适时滑移率与目标滑移率之间的第三差值,并计算所述第三差值与所述适时滑移率之间的第二比值;
33、若所述第二比值大于第二预设值,则确定所述滑移情况为制动打滑。
34、进一步的,所述基于所述目标轮速,所述参考车速值以及所述滚动半径计算适时滑移率,包括:
35、计算所述目标轮速与所述滚动半径之间的第二乘积,并计算所述参考车速值与所述第二乘积之间的第四差值;
36、将所述第四差值与所述目标轮速与所述滚动半径之间的乘积之间的比值作为所述适时滑移率。
37、进一步的,所述根据所述行驶控制场景下的滑移情况计算所述目标驱动电机的电机扭矩,包括:
38、获取所述滑移情况对应的电机转速计算策略以及目标滑移率;
39、利用所述目标滑移率以及所述电机转速计算策略计算期望轮速,并基于预设电机转速与轮速之间的对应关系,确定所述目标轮速对应的期望电机转速;
40、基于预设电机转速与电机扭矩之间的映射关系,确定所述期望电机转速对应的电机扭矩。
41、进一步的,所述利用所述目标滑移率以及所述电机转速计算策略计算期望轮速,包括:
42、若所述滑移情况为驱动打滑,则获取预设值与所述目标滑移率之间的差值,计算所述参考车速与所述差值之间的第一比值,并基于所述第一比值以及车轮的滚动半径计算所述期望轮速;
43、或,若所述滑移情况为制动打滑,则获取预设值与所述目标滑移率之间的和值,计算所述参考车速与所述和值之间的第二比值,并基于所述第二比值与车轮的滚动半径计算所述期望轮速。
44、第二方面,本发明实施例提供了一种车辆电机扭矩的控制装置,所述装置包括:
45、获取模块,用于获取所述车辆在当前行驶过程中的实时车速信号,并获取参考车速信号,其中,所述实时车速信号是根据所述车辆中各个驱动电机的电机转速得到的;
46、对比模块,用于对比所述实时车速信号与所述参考车速信号,确定所述车辆当前的行驶控制场景;
47、分析模块,用于利用所述参考车速信号以及所述目标驱动电机的目标电机转速,分析所述车辆在所述行驶控制场景下的滑移情况;
48、控制模块,用于根据所述行驶控制场景下的滑移情况计算所述目标驱动电机的电机扭矩,并控制所述目标驱动电机按照所述电机扭矩运行。
49、进一步的,所述获取模块,用于获取所述目标驱动电机产生的第一电机转速信号,并获取所述车辆中除所述目标驱动电机之外其他驱动电机的第二电机转速信号;基于所述第一电机转速信号以及所述第二电机转速信号计算所述实时车速信号。
50、进一步的,所述获取模块,用于接收所述车辆的动力控制器发送的参考车速信号,其中,所述参考车速信号为所述动力控制器中预设的车速信号,或所述动力控制器根据所述车辆的历史行驶数据计算得到的车速信号。
51、进一步的,所述对比模块,用于获取所述实时车速信号中的最大信号值以及最小信号值;对比所述参考车速信号的信号值以及所述最大信号值得到第一对比结果,或,对比所述参考车速信号的信号值与所述最小信号值得到第二对比结果;基于所述第一对比结果或所述第二对比结果确定所述行驶控制场景。
52、进一步的,所述对比模块,用于若所述第一对比结果为所述参考车速信号的信号值小于所述最大信号值,则所述行驶控制场景为驱动场景;或,若所述第二对比结果为所述参考车速信号的信号值大于所述最小信号值,则所述行驶控制场景为制动场景。
53、进一步的,所述分析模块,包括:
54、第一确定子模块,用于若所述行驶控制场景为驱动场景,则基于预设电机转速与轮速之间的对应关系,确定所述目标电机转速对应的目标轮速,其中,所述目标轮速是车轮绕轴旋转的速度;
55、第一解析子模块,用于根据所述参考车速信号确定参考车速值;
56、第一处理子模块,用于获取所述车轮的滚动半径,并基于所述目标轮速,所述参考车速值以及所述滚动半径计算适时滑移率;
57、第一计算子模块,用于获取所述适时滑移率与目标滑移率之间的第一差值,并计算所述第一差值与所述适时滑移率之间的第一比值;
58、第一判定子模块,用于若所述第一比值大于第一预设值,则确定所述滑移情况为驱动打滑。
59、进一步的,所述第一处理子模块,用于计算所述目标轮速与所述滚动半径之间的第一乘积,并计算所述第一乘积与所述参考车速值之间的第二差值;将所述第二差值与所述目标轮速与所述滚动半径之间的乘积之间的比值作为所述适时滑移率。
60、进一步的,所述分析模块,包括:
61、第二确定子模块,用于若所述行驶控制场景为制动场景,则基于预设电机转速与轮速之间的对应关系,确定所述目标电机转速对应的目标轮速,其中,所述目标轮速是车轮绕轴旋转的速度;
62、第二解析子模块,用于根据所述参考车速信号确定参考车速值,并获取所述车轮的滚动半径;
63、第二处理子模块,用于基于所述目标轮速,所述参考车速值以及所述滚动半径计算适时滑移率;
64、第二计算子模块,用于获取所述适时滑移率与目标滑移率之间的第三差值,并计算所述第三差值与所述适时滑移率之间的第二比值;
65、第二判定子模块,用于若所述第二比值大于第二预设值,则确定所述滑移情况为制动打滑。
66、进一步的,所述第二处理子模块,用于计算所述目标轮速与所述滚动半径之间的第二乘积,并计算所述参考车速值与所述第二乘积之间的第四差值;将所述第四差值与所述目标轮速与所述滚动半径之间的乘积之间的比值作为所述适时滑移率。
67、进一步的,所述控制模块,用于获取所述滑移情况对应的电机转速计算策略以及目标滑移率;利用所述目标滑移率以及所述电机转速计算策略计算期望轮速,并基于预设电机转速与轮速之间的对应关系,确定所述目标轮速对应的期望电机转速;基于预设电机转速与电机扭矩之间的映射关系,确定所述期望电机转速对应的电机扭矩。
68、进一步的,所述控制模块,用于若所述滑移情况为驱动打滑,则获取预设值与所述目标滑移率之间的差值,计算所述参考车速与所述差值之间的第一比值,并基于所述第一比值以及车轮的滚动半径计算所述期望轮速;或,若所述滑移情况为制动打滑,则获取预设值与所述目标滑移率之间的和值,计算所述参考车速与所述和值之间的第二比值,并基于所述第二比值与车轮的滚动半径计算所述期望轮速。
69、第三方面,本发明实施例提供了一种车辆,所述车辆包括:多个电机扭矩控制系统,每个所述电机扭矩控制系统包括:电机控制器以及驱动电机,所述电机控制器与驱动电机连接,所述驱动电机通过驱动半轴与车辆的车轮连接,所述驱动电机上设有旋变传感器,所述旋变传感器用于检测所述驱动电机的目标电机转速,并将所述目标电机转速传输至所述电机控制器,所述电机控制器用于执行上述的车辆电机扭矩的控制方法。
70、第四方面,本发明实施例提供了一种电子设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的方法。
71、本技术实施例提供的方法能够根据车辆的实时车速和参考车速准确判定行驶控制场景,使车辆的控制更加贴合实际行驶状况。通过分析滑移情况来计算电机扭矩,有助于更精准地调整电机的输出,从而优化车辆的动力性能和稳定性。另外,直接基于车辆中各个驱动电机的电机转速获取实时车速信号,减少了中间的信号传递环节和处理过程,相比常规扭矩或转速控制方式中复杂的信号传递路径,能够更快速、准确地获取到关键的车速信息,通过电机控制器及时有效地对不同场景下的打滑现象进行判断和控制,改善了抑制效果不佳的情况。整体方案形成了一个闭环的控制体系,能够实时监测、分析和调整,有效提升了车辆的行驶安全性。
72、本技术实施例提供的方法通过预设的电机转速与轮速的对应关系,能够准确地确定目标轮速,为后续的滑移率计算提供了精确的基础。其次,综合参考车速信号、车轮滚动半径等多个因素来计算适时滑移率,能够更全面地反映车辆的实际行驶状态,提高了对驱动情况判断的准确性。然后通过不断获取适时滑移率并与目标滑移率进行比较,可以实时监测车辆是否出现驱动打滑情况,并及时进行调整,增强了车辆行驶的稳定性和安全性。能够在滑移情况恶化之前就能够发现潜在的驱动打滑问题,提前采取措施进行预防,降低了事故发生的风险。
73、本技术实施例提供的方法基于预设关系确定目标轮速,能为制动场景提供准确的轮速基础。其次,结合参考车速、车轮滚动半径等多因素计算适时滑移率,全面反映制动时车辆的状态,使对制动情况的判断更准确可靠。然后通过持续获取和比较适时滑移率与目标滑移率,能实时监测制动打滑的可能性,及时采取应对措施,增强制动的稳定性和安全性。在制动打滑情况变得严重之前就进行判断和干预,有效预防因制动失控导致的事故,保障行车安全。