用于车辆原地转向的电机控制器、动力总成和车辆的制作方法
本技术涉及车辆动力控制领域,尤其涉及一种用于车辆原地转向的电机控制器、动力总成和车辆。
背景技术:
1、原地转向又称坦克原地掉头,在车辆进行原地掉头时,可以向左右两侧车轮施加方向相反的驱动扭矩,使车辆产生横摆力矩和横摆角速度,以此来克服有轮胎地面侧向反作用力产生的转动阻力矩。当横摆力矩与转动阻力矩平衡时,车辆形成稳定运行的横摆角速度。然而,在车辆原地转向过程中,路面附着的波动会导致车轮的滑移率和车辆的横摆力矩波动,进而导致车辆转向圆心偏移甚至车辆失稳,影响原地转向的安全性和稳定性。
技术实现思路
1、本技术提出一种用于车辆原地转向的电机控制器、动力总成和车辆,该电机控制器可以在车辆原地转向过程中,基于旋转变压器信号对车轮的滑移率和路面附着系数实时观测,及时调整电机的扭矩输出以匹配路面附着,此过程中均在电机控制器内部环路闭环实现,横摆加速度和车轮滑移率观测和控制的时延低,车辆原地转向的安全性高、稳定性强。
2、第一方面,本技术提供了一种用于车辆原地转向的电机控制器,该电机控制器用于控制车辆的一个电机驱动车辆的一个车轮。车辆还包括其他三个电机和其它三个车轮,其他三个电机分别用于驱动其它三个车轮。该一个电机和其他三个电机用于驱动车辆原地转向,车辆原地转向的过程中该电机控制器用于接收扭矩指示信号并控制该一个电机的输出扭矩,该电机控制器的控制响应于该一个电机在预设时长内的转速变化值小于预设第一阀值并根据扭矩指示信号指示的扭矩控制该一个电机输出扭矩,该电机控制器响应于该一个电机在预设时长内的转速变化值大于或者等于预设第一阀值并控制该一个电机输出的扭矩小于或大于扭矩指示信号指示的扭矩。
3、在第一方面提供的电机控制器中,该电机控制器用于根据旋转变压器信号输出该一个电机在预设时长内的转速变化值。
4、其中,预设时长内该一个电机的转速变化值小于预设第一阈值,可以理解为路面附着和轮胎的滑移率未出现显著变化,此时该一个电机转动平稳,电机控制器无需对该电机的输出扭矩进行调整。预设时长内该一个电机的转速变化值大于或者等于预设第一阈值,可以理解为由于路面附着发生变化,导致车轮出现打滑、转动遇到阻力等异常现象,使得该一个电机的转速发生突变。此时若不对该一个电机输出的扭矩进行调整,可能会导致车辆转向中心发生偏移。因此,电机控制器会对电机进行扭矩调整,抑制车轮打滑或克服转动阻力等。
5、本技术实施例对该预设时长不作限定。示例性的,该预设时长可以是该一个电机旋转变压器的采样时长的倍数。
6、该电机控制器适用于电动车辆或混合动力车辆,该车辆可以是分布式电机或集中式电机架构,拥有多个电机和多个电机控制器,该电机控制器可以是多个电机控制器中的任意一个。该一个电机可以是轮边电机或轮毂电机,该电机可以独立驱动车辆的一个车轮。
7、对应的,第一方面提供的电机控制器在电动车辆原地转向过程中,该电机控制器可以基于旋转变压器信号确定其控制的该一个电机的转速发生变化,从而更快地感知路面附着和轮胎的滑转情况,更快地主动调整该一个电机的扭矩输出,避免车辆转向中心发生偏移。同时,这一过程均在电机控制器内部环路闭环实现,横摆加速度和车轮滑移率观测和控制的时延低,车辆原地转向的安全性高、稳定性强。
8、结合第一方面,在第一方面的某些实现方式中,该电机控制器用于在车辆进行原地转向的过程中响应于该一个电机在预设时长内的转速增大值大于或者等于预设第一阀值并控制该一个电机减小扭矩输出,该电机控制器用于在车辆进行原地转向的过程中响应于该一个电机在预设时长内的转速减小值大于或者等于预设第一阀值,控制该一个电机增大扭矩输出。
9、对应的,在车辆原地转向的过程中,若出现车轮打滑或遇到阻力等异常现象时,该电机控制器会根据其所控制的该一个电机的转速波动情况快速地对该一个电机的扭矩输出进行调整以使车轮旋转达到平稳。当该一个电机在预设时长内的转速增大值大于或者等于预设第一阀值时,即意味着车轮出现了打滑已经转动不平稳,该一个电机控制器控制该电机减小扭矩输出以使车轮旋转达到平稳;当该一个电机在预设时长内的转速减小值大于或者等于预设第一阀值,即意味着车轮转动遭遇到阻力而使得转动不平稳,该电机控制器控制该一个电机增大扭矩输出以使车轮旋转达到平稳。
10、下文将路面附着系数较低(例如潮湿路面、结冰路面等)的路面称为低附路面,反之将路面附着系数较高的路面(例如干燥的铺装路面)称为高附路面。
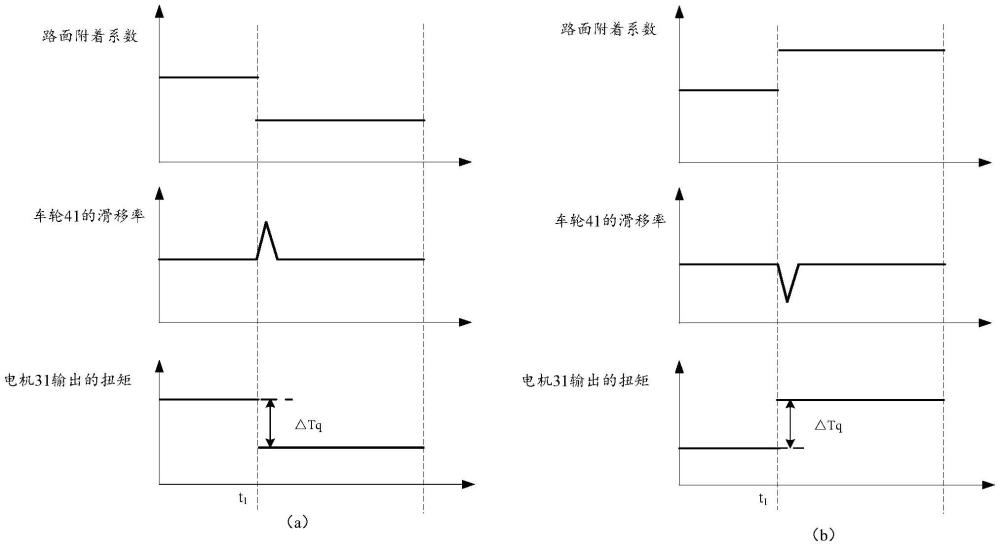
11、作为示例而非限定,当电动车辆转向过程中车轮由高附路面移动到低附路面时,由于低附路面需求的扭矩较小,若电机仍输出原地转向信号所指示的扭矩值会导致车轮的受到的驱动力大于路面的附着力,使得车轮的滑移率增大,从而带动电机转速异常增大。在此场景中,电机控制器需要主动控制电机减小扭矩输出,使得车轮受到的驱动力与低附路面的路面附着力匹配,从而避免转向圆心偏移。
12、作为示例而非限定,电动车辆转向过程中车轮由低附路面移动到高附路面时,由于高附路面需求的扭矩较大,若电机仍输出原地转向信号所指示的扭矩值会导致车轮受到的驱动力不足,使得车轮的滑移率减小,带动电机转速异常减小。在此场景中,电机控制器需要主动控制电机增大扭矩输出,使得车轮受到的驱动力与高附路面的路面附着力匹配,从而避免转向圆心偏移。
13、根据本技术实施例,电机控制器可以通过调整电机的扭矩输出,使得车轮受到的驱动力与路面附着力匹配,以保持车轮的滑移率稳定,避免车辆转向中心发生偏移,可以提高用户实用体验并减小轮胎滑移率突变对轮胎的磨损,从而提高车辆原地转向的实用性。
14、结合第一方面,在第一方面的某些实现方式中,该电机控制器在车辆原地转向的过程中还用于响应于该一个电机在预设时长内的转速变化值大于预设第二阀值,控制该一个电机停止输出扭矩,预设第二阀值大于预设第一阀值。
15、对应的,当预设时长内该一个电机的转速变化值大于第二阈值时,可以理解为路面附着持续变化导致的车轮滑移率变化过大,使得车辆可能在完成后续转向过程中无法保证车身稳定,此时该电机控制器可以主动控制该一个电机停止输出扭矩,从而提高车辆原地转向的安全性。
16、结合第一方面,在第一方面的某些实现方式中,该电机控制器用于在车辆原地转向过程中响应于驱动踏板信号指示的扭矩输出值控制该一个电机的输出扭矩。该一个电机在预设时长内的转速变化值小于预设第一阀值,该电机控制器控制该一个电机根据驱动踏板信号指示的该一个电机的扭矩输出值输出扭矩;该一个电机在预设时长内的转速变化值大于或等于预设第一阀值,该电机控制器控制该一个电机输出的扭矩小于或大于驱动踏板信号指示的该一个电机的扭矩输出值。
17、对应的,在此实现方式中车辆原地转向过程时,用户可以通过改变驱动踏板的开度,调整该一个电机输出的扭矩,进而改变原地转向的转向速度。
18、可以理解,该一个电机的转速变化值小于第一阈值可以视为路面附着和车轮的滑移率未发生显著变化,此时该电机控制器响应于驱动踏板信号指示的电机的扭矩增大,可以根据驱动踏板的指示增大电机输出的扭矩,或者该电机控制器响应于驱动踏板信号指示的该一个电机的扭矩减小,电机控制器可以根据驱动踏板的指示减小该一个电机输出的扭矩。
19、可以理解,该一个电机的转速变化值大于或者等于第一阈值可以视为路面附着或车轮的滑移率发生显著变化,轮胎旋转出现打滑或受阻,此时该电机控制器不会完全响应于驱动踏板信号指示的扭矩值,而是该电机控制器会根据路面附着和轮胎的旋转来主动调整该一个电机的扭矩输出,从而保证该一个电机输出的扭矩使得轮胎旋转与路面附着匹配而运转平稳。
20、可以理解,上述驱动踏板信号可以是用户通过调整驱动踏板开度输出的,也可以是用户通过在车机中调整原地转向速度输出的,本技术实施例对此不作限定。
21、在该实施方式的原地转向过程中,该电机控制器可以在响应于用户改变原地转向速度的同时,主动调整电机输出的扭矩以匹配路面附着,避免车辆的转向中心发生偏移,车辆原地转向功能的安全性高、实用性强。
22、结合第一方面,在第一方面的某些实现方式中,车辆进行原地转向的过程中该一个电机在预设时长内的转速变化值大于或者等于预设第一阀值,该电机控制器用于在控制该一个电机输出扭矩时向车辆的整车控制器发送第一信号,该第一信号用于指示该电机控制器控制该一个电机在车辆原地转向时输出的
23、相应的,在车辆原地转向过程中,该一个电机的转速变化值大于或者等于第一阈值可以视为路面附着或车轮的滑移率发生显著变化,轮胎旋转出现打滑或受阻,此时该电机控制器不会完全响应于驱动踏板信号指示的扭矩值,而是该电机控制器根会据路面附着和轮胎的旋转来主动调整该一个电机的扭矩输出,该电机控制器向整车控制器发送该一个电机当前的工作状态,无需整车控制器二次下发扭矩调整指令,从而实现了整个控制过程在该电机控制器内部实现闭环,缩短了控制路径,提高了控制的速度和精确度。
24、第二方面,本技术提供了一种动力总成,该动力总成包括第一电机和第一方面任一实现方式中的电机控制器,旋转变压器安装在第一电机的一侧,电机控制器用于接收旋转变压器信号,旋转变压器信号用于指示第一电机的转速。
25、对应的,第二方面的实现形式中将电机和电机控制器集成为一个动力总成,可以节省安装空间。同时在车辆原地转向过程时,该电机控制器可以基于旋转变压器信号确定电机的转速发生突变,从而主动调整对应的电机的扭矩输出,避免车辆转向中心发生偏移。横摆加速度和车轮滑移率观测和控制的时延会更低,车辆原地转向的安全性更高、稳定性更强。
26、第三方面,本技术提供了一种车辆,该车辆包括四个车轮、四个电机和四个电机控制器,四个电机分别用于驱动四个车轮,每个电机控制器分别用于对应控制一个电机输出扭矩驱动一个车轮,车辆在原地转向过程中同一车轴左右两侧车轮的旋转方向不同,旋转方向包括向前旋转、向后旋转以及静止,车辆在原地转向过程中控制四个电机控制器用于接收扭矩指示信号并控制四个电机的输出扭矩,其中:
27、四个电机控制器分别响应于四个电机在预设时长内的转速变化值小于第一方面的预设第一阀值,分别根据接收的扭矩指示信号指示的扭矩控制四个电机输出扭矩;
28、四个电机控制器响应于四个电机在预设时长内的转速变化值大于或者等于预设第一阀值,分别根据接收的扭矩指示信号指示的扭矩控制四个电机输出的扭矩小于或大于扭矩指示信号指示的扭矩。
29、对应的,本技术提供的车辆采用分布式四电机系统,每个电机控制器控制一个电机驱动一个车轮旋转。四个电机在预设时长内的转速变化值小于预设第一阀值也即意味着四个车轮的旋转平稳,此时四个电机控制器会根据车辆需要原地转向时发出的扭矩指令来分别控制四个车轮旋转,从而实现车辆的原地掉头。在车辆原地掉头的过程中,同一车轴左右两侧车轮的旋转方向不同,从而才能保证原地掉头时车身位置不发生较大偏转,使得车辆保持在原地更容易实现转向。
30、结合第三方面,第三方面的某种实现方式中,原地转向过程中车辆指示一个电机控制器控制一个电机保持一个车轮静止,车辆指示其余三个电机控制器用于分别根据扭矩指示信号指示的扭矩控制其余三个电机输出扭矩驱动其余三个车轮旋转,车辆绕一个车轮原地转向。
31、对应的,在这种实现方式的原地转向中,车辆可以指示一个电机控制器控制一个电机不输出扭矩从而保持一个车轮静止,同时车辆指示其余三个电机控制器分别根据指示的扭矩控制其余三个电机输出扭矩来驱动其余三个车轮旋转,从而实现车辆绕一个车轮原地转向。车辆可以指示任何一个车轮静止,从而实现多种不同的原地转向方式,提高了原地转向的便利性。
32、结合第三方面,第三方面的某种实现方式中,车辆绕一个车轮原地转向过程中,其余三个电机中任一个电机在预设时长内的转速变化值大于或等于预设第一阀值,车辆指示其余三个电机中的另外两个电机所对应的两个电机控制器用于分别根据扭矩指示信号指示的扭矩控制其余三个电机中的另外两个电机输出扭矩驱动其余三个电机中的另外两个电机所驱动的车轮旋转。
33、对应的,在这种实现方式的原地转向中,车辆绕一个车轮原地转向时其余三个电机中任一个电机在预设时长内的转速变化值大于或等于预设第一阀值,也即意味着其余三个电机中的该电机所驱动的车轮出现了打滑或旋转受阻,此时该电机的电机控制器不再完全按照车辆的扭矩指示控制该电机输出扭矩,而是会进行扭矩调整以控制该电机所驱动的车轮消除打滑或旋转受阻从而使其旋转平稳,同时车辆会指示其余三个电机中的另外两个电机所对应的电机控制器按照扭矩指令指示的变更扭矩值来调整扭矩输出驱动对应的车轮旋转,从而更快实现该种场景下的原地转向。
34、结合第三方面,第三方面的某种实现方式中,车辆绕一个车轮原地转向过程中,其余三个电机中任两个电机在预设时长内的转速变化值分别大于或等于预设第一阀值,车辆指示其余三个电机中的另外一个电机所对应的电机控制器用于根据扭矩指示信号指示的扭矩控制其余三个电机中的另外一个电机输出扭矩驱动其余三个电机中的另外一个电机所驱动的车轮旋转。
35、对应的,在这种实现方式的原地转向中,车辆绕一个车轮原地转向时其余三个电机中任两个电机在预设时长内的转速变化值大于或等于预设第一阀值,也即意味着其余三个电机中的该两个电机所驱动的车轮出现了打滑或旋转受阻,此时该两个电机的电机控制器不再完全按照车辆的扭矩指示控制该电机输出扭矩,而是会进行扭矩调整以控制该两个电机所驱动的车轮消除打滑或旋转受阻从而使其旋转平稳。同时车辆会指示其余三个电机中的另外一个电机所对应的电机控制器按照扭矩指令指示的变更扭矩值来调整扭矩输出驱动对应的车轮旋转,从而更快实现该种场景下的原地转向。
36、结合第三方面,第三方面的某种实现方式中,车辆包括后轮转向机构,车辆在原地转向过程中车辆分别指示四轮的左后轮通过后轮转向机构转过第一预设角度和四轮的右后轮通过后轮转向机构转过第二预设角度。车辆指示四个电机控制器中任一对对角电机控制器控制一对对角的电机不输出扭矩驱动一对对角的车轮,车辆指示四个电机控制器中的另一对对角电机控制器分别根据扭矩指示信号指示的扭矩控制另一对对角的电机输出扭矩驱动另一对对角的电机所驱动的车轮相互反向旋转。
37、对应的,在这种实现方式的原地转向中,车辆具有后轮转向机构,车辆借助后轮转向机构让后轮转过一定的角度,车辆通过指示任一对对角电机控制器控制一对对角的电机不输出扭矩驱动一对对角的车轮,指示另一对对角电机控制器分别根据扭矩指示信号指示的扭矩控制另一对对角的电机输出扭矩驱动另一对对角的电机所驱动的车轮相互反向旋转,从而实现了依靠一对对角车轮旋转来实现车辆的原地转向,增加了原地转向的新方式和灵活性。
38、结合第三方面,第三方面的某种实现方式中,车辆包括后轮转向机构并通过另一对对角车轮来实现原地转向时,另一对对角的电机中的任一个电机在预设时长内的转速变化值大于或等于预设第一阀值,车辆指示另一对对角的电机中的另一个电机所对应的电机控制器根据扭矩指示信号指示的扭矩控制另一对对角的电机中的另一个电机输出扭矩驱动另一对对角的电机中的另一个电机驱动的车轮旋转。
39、对应的,在这种实现方式的原地转向中,车辆依靠一对对角车轮旋转来实现原地转向时,当该对对角车轮的驱动电机中的任一个电机在预设时长内的转速变化值大于或等于预设第一阀值,也即为着该任一电机所驱动的车轮出现了打滑或旋转受阻,该任一电机的电机控制器将不再完全按照车辆的指示扭矩驱动该任一电机,而是会进行扭矩调整来保证车轮不打滑或旋转不受阻。此时,车辆会指示该对对角车轮的驱动电机中的另一个电机的电机控制器根据扭矩指示信号指示的更新扭矩控制另一个电机输出扭矩驱动另一个车轮旋转,从而更快实现该种场景下的原地转向。
40、结合第三方面,第三方面的某种实现方式中,车辆包括后轮转向机构和前轮转向机构,车辆在原地转向过程中车辆分别指示四轮的左前轮通过前轮转向机构转过第三预设角度、四轮的右前轮通过前轮转向机构转过第四预设角度、四轮的左后轮通过后轮转向机构转过第五预设角度以及四轮的右后轮通过后轮转向机构转过第六预设角度,车辆指示四个电机控制器分别控制四个电机输出与四轮的对应预设角度成预设比例的扭矩。
41、对应的,在这种实现方式的原地转向中,车辆具有前、后轮的转向机构,可以实现前、后轮的独立转向。车辆通过预先调整前、后轮转向到一定角度后指示四个电机控制器分别控制四个电机按四轮的对应预设角度成预设比例的扭矩值输出扭矩,不仅可以减小原地转向的输出扭矩还可以更加快速、精准地实现车辆原地转向。
42、结合第三方面,第三方面的某种实现方式中,车辆包括显示屏,车辆在原地转向过程中该显示屏用于显示四个电机的输出扭矩大小,该显示屏还用于显示四个电机中的任一个电机在预设时长内的转速变化值大于或等于第一阀值后四个电机中的任一个电机输出扭矩的变化过程,四个车轮的旋转速度及车辆的原地转向速度。
43、对应的,在车辆原地转向时,车辆可以将原地转向过程的四个电机的输出扭矩大小,任一车轮出现打滑或旋转受阻时其所对的电机输出扭矩的变化过程,四个车轮的旋转速度及车辆的原地转向速度等显示到屏幕上,有助于驾驶人员实时观察到车辆原地转向的情况,及时地控制车辆原地转向继续或停止,提升了驾驶人员的驾乘体验。
44、如上第二方面和第三方面所提供的方案的补充和技术效果,可参考第一方面的相应说明,不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!