一种抬拨线装置控制方法与流程
本技术涉及铁路工程机械,尤其涉及一种应用于城市轨道交通的抬拨线装置控制方法。
背景技术:
1、抬拨线装置是一种用于接触网检修的关键设备,主要用于检测、维护和保养接触网系统(包括接触导线、承力索等部件)。随着国内铁路工程建设的大规模推进,市场对接触网检测和维护设备的需求不断增长,特别是对于混合动力接触网检测车、隧道接触网检测车等多种新型车辆的需求日益增加。目前,我国轨道线路上对铁路接触网装置(包括接触导线、承力索等)全方位检修、维护和保养的作业主要依靠人工操作,存在施工人员需求量大、劳动强度高、有安全隐患等缺点。为解决上述技术缺陷,提高接触网线的抬线、拨线的作业的机械化程度、减轻人工劳动作业强度,开发一种抬拨线装置控制方法实现抬拨线装置控制显得尤为迫切。
2、在现有技术中,主要有以下文献与本发明申请相关:
3、文献1为中铁宝工有限责任公司于2007年11月30日申请,并于2008年10月22日公告,公告号为cn201136444y的中国实用新型专利。该实用新型专利公开了一种恒张力架线臂抬拨装置,底架焊接于车辆构架上,抬拨装置整体刚性固定于底架之上。抬拨装置中的两个升缩臂通过升缩臂支架铰接在底架两侧,带动升缩臂升缩的升缩油缸与升缩臂连接。两个变幅油缸一端铰接在底架中部,另外一端铰接在升缩臂底部,升缩油缸、变幅油缸均通过油管与液压阀组连通,液压阀组与遥控控制器连接。该实用新型通过底架焊接于车辆构架上,抬拨装置整体刚性固定于底架之上。液压动力源来自车辆的液压泵站,在放线作业时,将架线臂升起,变幅油缸和升缩油缸配合动作,把接触线或承力索抬高并拨至预期位置。
4、文献2为宝鸡中车时代工程机械有限公司于2018年12月10日申请,并于2019年03月01日公开,公开号为cn109398386a的中国发明申请。该发明申请公开了一种具有联控作业回路的轨道车,包括车体和安装于车体的联控作业装置,联控作用装置包括高空作业斗装置、三平台作业装置及抬拨线装置。高空作业斗装置、三平台作业装置以及抬拨线装置之间相互间隔安装并通过机车电缆相互连接,从而共同形成联控作业回路。高空作业斗装置计算其自身工作状态,结合预设规则生成解锁/互锁指令并反馈至三平台作业装置和抬拨线装置,以控制三平台作业装置和抬拨线装置的工作状态。该发明具有联控作业回路的轨道车可靠性好且安全性高。
5、然而,上述文献仅仅描述了抬拨线装置的结构,并未给出控制系统及方法的具体技术方案。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种抬拨线装置控制方法,以解决现有抬拨线作业装置自动化程度低、施工人员需求量大、劳动强度高、存在安全隐患的技术问题。
2、为了实现上述发明目的,本技术具体提供了一种抬拨线装置控制方法的技术实现方案,抬拨线装置包括底座,及安装在所述底座上的主臂。所述主臂通过滑座安装在底座上,在所述底座上设置锁定装置。该方法包括以下步骤:
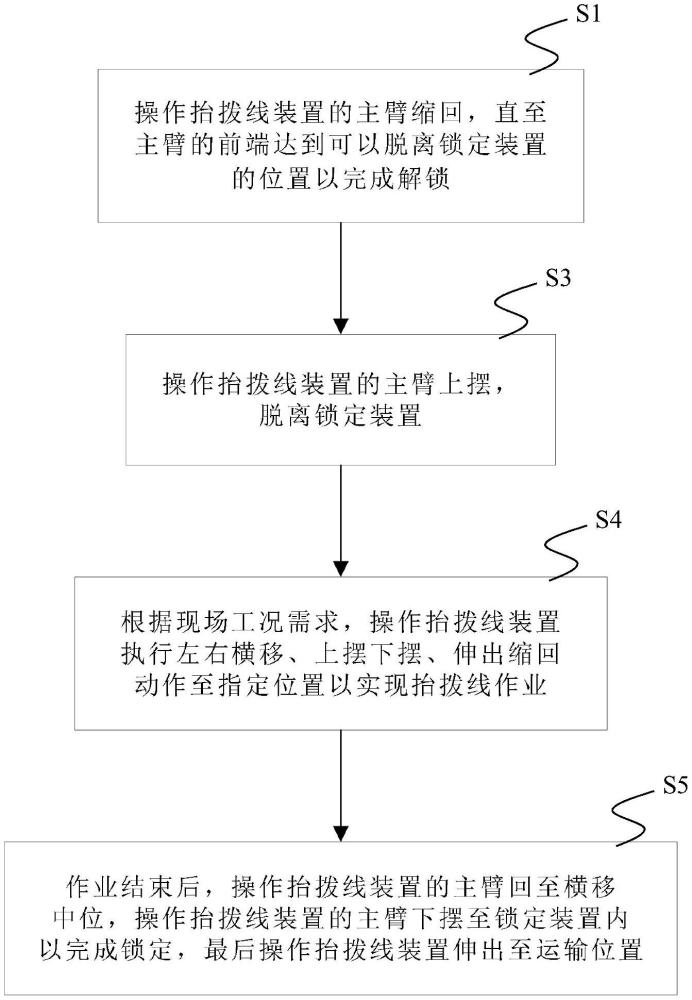
3、s1)操作所述抬拨线装置的主臂缩回,直至所述主臂的前端达到可以脱离锁定装置的位置以完成解锁;
4、s2)操作所述抬拨线装置的主臂上摆,脱离锁定装置;
5、s3)根据现场工况需求,操作抬拨线装置执行左右横移、上摆下摆、伸出缩回动作至指定位置以实现抬拨线作业;
6、s4)作业结束后,操作抬拨线装置的主臂回至横移中位,操作抬拨线装置的主臂下摆至锁定装置内以完成锁定,最后操作抬拨线装置伸出至运输位置。
7、进一步的,在所述主臂的前端设置锁定触发装置,在所述底座上设置机械锁定行程开关及运输位置行程开关,在所述滑座上设置横移到位行程开关。所述步骤s1)的解锁过程包括:
8、当所述抬拨线装置处于锁定状态时,主臂缩回,使所述锁定触发装置脱离运输位置行程开关。所述主臂缩回到底后再上摆,使锁定触发装置脱离机械锁定行程开关的锁定卡槽,再按下左回中位或右回中位按钮使所述锁定触发装置恢复后,滑座能自由横移,所述抬拨线装置完成解锁。
9、进一步的,所述步骤s4)的锁定过程包括:
10、当抬拨线作业结束后,所述滑座横移至中位后停在中位。所述主臂缩回后再下摆,使主臂前端的锁定触发装置落入锁定装置内,触发所述机械锁定行程开关后主臂不能再下摆。再控制所述主臂伸出,触发运输位置行程开关后主臂不能再伸出,所述抬拨线装置完成锁定。
11、进一步的,所述步骤s3)的滑座横移过程包括:
12、当进行滑座横移控制时,首先将操作模式选择开关设置为遥控模式,并将抬拨线装置解锁。打开遥控器的电源开关,选择需要控制的抬拨线装置,根据动作速度需要旋转速度电位计至合适位置以控制滑座横移。
13、进一步的,通过液压系统驱动所述主臂实现伸出、缩回、上摆及下摆动作,并通过液压系统驱动所述滑座实现左右横移动作。所述液压系统还包括使能电磁阀、滑座左移比例阀及滑座右移比例阀。按下遥控器的确认按钮,同时操作滑座横移拨杆左移或右移,所述控制模块输出信号控制使能电磁阀得电,同时输出信号控制滑座左移比例阀或滑座右移比例阀,所述滑座开始向左横移或向右横移。在滑座横移过程中,松开确认按钮或滑座横移拨杆时,滑座停止横移。
14、进一步的,所述步骤s3)的滑座横移控制过程包括:
15、当需要将抬拨线装置横移至中位时,先按下左回中位或右回中位按钮,在按住确认按钮的同时,操作滑座横移拨杆左移或右移,所述控制模块输出信号控制使能电磁阀得电,同时输出信号控制滑座左移比例阀或滑座右移比例阀,所述滑座开始向左横移或向右横移。当所述滑座横移至中位时,触发横移到位行程开关,所述控制模块不再输出信号至使能电磁阀,以及滑座左移比例阀或滑座右移比例阀,所述滑座停止横移并停在中位。
16、进一步的,所述步骤s3)的主臂摆动控制过程包括:
17、当进行主臂摆动控制时,首先将操作模式选择开关设置为遥控模式,并将抬拨线装置解锁。打开遥控器的电源开关,选择需要控制的抬拨线装置,根据动作速度需要旋转速度电位计至合适位置以控制主臂摆动。
18、进一步的,所述液压系统还包括主臂上摆比例阀及主臂下摆比例阀,所述步骤s3)的主臂摆动控制过程包括:
19、按下遥控器的确认按钮,同时操作主臂摆动拨杆上摆或下摆,所述控制模块输出信号控制使能电磁阀得电,同时输出信号控制主臂上摆比例阀或主臂下摆比例阀,所述主臂开始上摆或下摆。在摆动过程中松开确认按钮或主臂摆动拨杆时,所述主臂停止摆动。当主臂下摆进入锁定卡槽内,触发机械锁定行程开关时,所述主臂停止下摆。
20、进一步的,所述步骤s3)的主臂伸缩控制过程包括:
21、当进行主臂伸缩控制时,首先将操作模式选择开关设置为遥控模式,并将抬拨线装置解锁。打开遥控器的电源开关,选择需要控制的抬拨线装置,根据动作速度需要旋转速度电位计至合适位置以控制主臂伸缩。
22、进一步的,所述液压系统还包括主臂伸出比例阀及主臂缩回比例阀,所述步骤s3)的主臂伸缩控制过程包括:
23、按下遥控器的确认按钮,同时操作主臂伸缩拨杆伸出或缩回,所述控制模块输出信号控制使能电磁阀得电,同时输出信号控制所述主臂伸出比例阀或主臂缩回比例阀,主臂开始伸出或缩回。在所述主臂伸缩过程中,松开确认按钮或主臂伸缩拨杆时,主臂停止伸缩。当所述主臂进入机械卡槽内,且伸出触发运输位置行程开关时,主臂停止伸出。
24、通过实施上述本技术提供的抬拨线装置控制方法的技术方案,具有如下有益效果:
25、(1)本技术抬拨线装置控制方法,实现了对抬拨线装置横移、摆动、伸缩功能的全面控制,大幅减少了接触网线抬拨作业的人力成本,同时提升了接触网线抬拨作业效率;
26、(2)本技术抬拨线装置控制方法,对装置作业、运输过程的安全监测,以及施工过程的安全联锁控制,有效地保障了作业及运输过程的设备安全,同时也确保了作业过程的安全施工;
27、(3)本技术抬拨线装置控制方法,采用液压、pwm控制实现抬拨线装置动作功能,满足了铁路接触网全方位的检修、维护和保养需求,在应急启复能力、电气控制系统智能化、液压系统监测技术及辅助平台工作范围提升等方面实现了技术创新。
- 还没有人留言评论。精彩留言会获得点赞!