扭矩控制方法、车辆和存储介质与流程
本技术属于汽车,尤其涉及一种扭矩控制方法、车辆和存储介质。
背景技术:
1、当前新能源汽车中,为了防止电机换向速率太快导致的啮合面发生变化产生冲击,从而造成的驾驶员感觉到车辆顿挫,驾驶体验变差的问题,通常对扭矩调整过程进行滤波,从而使扭矩调整过程更加平稳,进而降低齿轮啮合面发生变化时产生的冲击,以降低车辆产生的顿挫感,优化驾驶体验。
2、然而,在扭矩调整需要进行两次滤波过程,即扭矩大小调整滤波过程和扭矩方向调整滤波过程,因此,滤波过程较复杂,导致车辆提速或减速过程较慢,驾驶体验较差。
技术实现思路
1、本技术的目的在于提供一种扭矩控制方法、车辆和存储介质,旨在解决传统的扭矩调整过程中,驾驶体验较差的问题。
2、本技术实施例的第一方面提供了一种扭矩控制方法,所述方法包括:
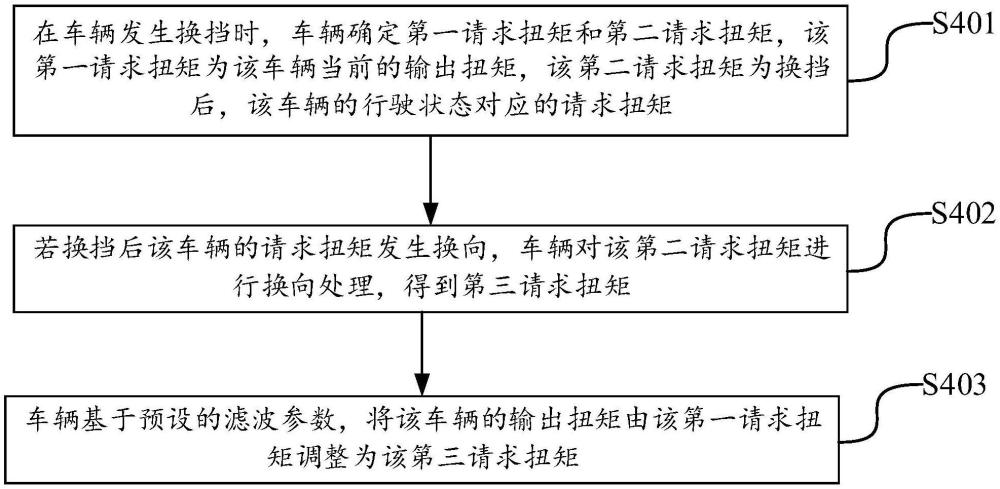
3、在车辆发生换挡时,确定第一请求扭矩和第二请求扭矩,所述第一请求扭矩为所述车辆当前的输出扭矩,所述第二请求扭矩为换挡后,所述车辆的行驶状态对应的请求扭矩;
4、若换挡后所述车辆的请求扭矩发生换向,对所述第二请求扭矩进行换向处理,得到第三请求扭矩;
5、基于预设的滤波参数,将所述车辆的输出扭矩由所述第一请求扭矩调整为所述第三请求扭矩。
6、在一些实施例中,确定所述第二请求扭矩,包括:
7、确定所述车辆换挡后的行驶状态,所述行驶状态包括蠕行状态、智能泊车状态、智能行驶状态和正常驾驶状态;
8、基于所述行驶状态,确定所述行驶状态对应的第二请求扭矩。
9、在一些实施例中,确定换挡后所述车辆的请求扭矩是否发生换向,包括:
10、获取所述车辆的行驶参数,所述行驶参数包括所述车辆的挡位信息、电机转速方向和车辆的扭矩方向,所述扭矩方向为第二请求扭矩的方向;
11、根据所述车辆的挡位信息、所述电机的转速方向和车辆的扭矩方向,确定换挡后所述车辆的请求扭矩是否发生换向。
12、在一些实施例中,所述根据所述车辆的挡位信息、所述电机的转速方向和车辆的扭矩方向,确定换挡后所述车辆的请求扭矩是否发生换向,包括:
13、若所述挡位信息表示车辆的挡位为前进挡,且所述电机的转速方向为负方向,且所述扭矩方向为负方向,则确定换挡后所述车辆的请求扭矩需要换向;或者,
14、若所述挡位信息表示车辆的挡位为倒车挡,且所述电机的转速方向为正方向,且所述扭矩方向为正方向,则确定换挡后所述车辆的请求扭矩需要换向;或者,
15、若所述挡位信息表示车辆的挡位为倒车挡,且所述电机的转速方向为负方向,且所述扭矩方向为正方向,则确定换挡后所述车辆的请求扭矩需要换向;或者,
16、若所述挡位信息表示车辆的挡位为倒车挡,且所述电机的转速方向为负方向,且所述扭矩方向为负方向,则确定换挡后所述车辆的请求扭矩需要换向。
17、在一些实施例中,所述方法还包括:
18、获取所述车辆的行驶参数,所述行驶参数包括所述车辆的挡位信息、电机转速方向;
19、当所述挡位信息表示车辆为前进挡时,若所述电机的转速方向为正方向,则确定所述车辆的目标电机状态包括驱动状态和能量回收状态;
20、若所述电机的转速方向为负方向,则确定所述车辆的目标电机状态包括能量回收状态;
21、当所述挡位信息表示车辆为倒车挡时,若所述电机的转速方向为正方向,则确定所述车辆的目标电机状态包括能量回收状态;
22、若所述电机的转速方向为负方向,则确定所述车辆的目标电机状态包括驱动状态和能量回收状态。
23、在一些实施例中,所述方法还包括:
24、若换挡后所述车辆的请求扭矩未发生换向,基于所述滤波参数,将所述车辆的输出扭矩由所述第一请求扭矩调整为所述第二请求扭矩。
25、在一些实施例中,所述基于预设的滤波参数,将所述车辆的输出扭矩由所述第一请求扭矩调整为所述第三请求扭矩,包括:
26、确定扭矩调整梯度;
27、基于所述扭矩调整梯度和所述第一请求扭矩,确定目标输出扭矩;
28、按照所述滤波参数,将所述车辆的输出扭矩由所述第一请求扭矩调整至所述目标输出扭矩;
29、直到所述车辆的输出扭矩达到所述第三请求扭矩。
30、本技术实施例的第二方面提供了一种扭矩控制装置,所述装置包括:
31、第一确定单元,用于在车辆发生换挡时,确定第一请求扭矩和第二请求扭矩,所述第一请求扭矩为所述车辆当前的输出扭矩,所述第二请求扭矩为换挡后,所述车辆的行驶状态对应的请求扭矩;
32、换向判断单元,用于若换挡后所述车辆的请求扭矩发生换向,对所述第二请求扭矩进行换向处理,得到第三请求扭矩;
33、控制单元,用于基于预设的滤波参数,将所述车辆的输出扭矩由所述第一请求扭矩调整为所述第三请求扭矩。
34、在一些实施例中,所述第一确定单元,用于确定所述车辆换挡后的行驶状态,所述行驶状态包括蠕行状态、智能泊车状态、智能行驶状态和正常驾驶状态;基于所述行驶状态,确定所述行驶状态对应的第二请求扭矩。
35、在一些实施例中,所述换向判断单元,用于获取所述车辆的行驶参数,所述行驶参数包括所述车辆的挡位信息、电机转速方向和车辆的扭矩方向,所述扭矩方向为第二请求扭矩的方向;根据所述车辆的挡位信息、所述电机的转速方向和车辆的扭矩方向,确定换挡后所述车辆的请求扭矩是否发生换向。
36、在一些实施例中,所述换向判断单元,用于若所述挡位信息表示车辆的挡位为前进挡,且所述电机的转速方向为负方向,且所述扭矩方向为负方向,则确定换挡后所述车辆的请求扭矩需要换向;或者,
37、所述换向判断单元,用于若所述挡位信息表示车辆的挡位为倒车挡,且所述电机的转速方向为正方向,且所述扭矩方向为正方向,则确定换挡后所述车辆的请求扭矩需要换向;或者,
38、所述换向判断单元,用于若所述挡位信息表示车辆的挡位为倒车挡,且所述电机的转速方向为负方向,且所述扭矩方向为正方向,则确定换挡后所述车辆的请求扭矩需要换向;或者,
39、所述换向判断单元,用于若所述挡位信息表示车辆的挡位为倒车挡,且所述电机的转速方向为负方向,且所述扭矩方向为负方向,则确定换挡后所述车辆的请求扭矩需要换向。
40、在一些实施例中,所述装置还包括:
41、行驶参数获取单元,用于获取所述车辆的行驶参数,所述行驶参数包括所述车辆的挡位信息、电机转速方向;
42、第二确定单元,用于当所述挡位信息表示车辆为前进挡时,若所述电机的转速方向为正方向,则确定所述车辆的目标电机状态包括驱动状态和能量回收状态;
43、所述第二确定单元,用于若所述电机的转速方向为负方向,则确定所述车辆的目标电机状态包括能量回收状态;
44、所述第二确定单元,用于当所述挡位信息表示车辆为倒车挡时,若所述电机的转速方向为正方向,则确定所述车辆的目标电机状态包括能量回收状态;
45、所述第二确定单元,用于若所述电机的转速方向为负方向,则确定所述车辆的目标电机状态包括驱动状态和能量回收状态。
46、在一些实施例中,所述控制单元,还用于若换挡后所述车辆的请求扭矩未发生换向,基于所述滤波参数,将所述车辆的输出扭矩由所述第一请求扭矩调整为所述第二请求扭矩。
47、在一些实施例中,所述控制单元,用于确定扭矩调整梯度;基于所述扭矩调整梯度和所述第一请求扭矩,确定目标输出扭矩;按照所述滤波参数,将所述车辆的输出扭矩由所述第一请求扭矩调整至所述目标输出扭矩;直到所述车辆的输出扭矩达到所述第三请求扭矩。
48、本技术实施例的第三方面提了一种车辆,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述扭矩控制方法。
49、本技术实施例的第四方面提了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述扭矩控制方法。
50、本发明实施例与现有技术相比存在的有益效果是:
51、在本技术实施例中,当车辆发生换挡时,首先确定当前的第一请求扭矩和换挡后车辆的行驶状态对应的第二请求扭矩,判断第二请求扭矩是否发生换向,若发生换向则直接控制车辆的扭矩从第一请求扭矩向换向后的第三扭矩调整,这样避免了车辆先从第一请求扭矩调整至第二请求扭矩,再从第二请求扭矩向换向后的第三请求扭矩调整,通过将换向判断的过程提前,无需再进行第一请求扭矩至第二请求扭矩的扭矩调整过程,简化了扭矩调整过程,提高了扭矩调整的效率,进而提高了车辆的扭矩输出速度,使车辆提速或减速的过程加快,优化了驾驶体验。
- 还没有人留言评论。精彩留言会获得点赞!