一种仿生操作机器人的驱动机构的制作方法
本发明涉及仿生机器人,尤其涉及一种仿生操作机器人的驱动机构。
背景技术:
1、近年来随着电网快速发展,电网设备规模大幅增长、安全运行风险和压力与日俱增,运检人员现场作业量持续上升,“人员少、体量大、发展快、要求高”的矛盾已日益突出,因此需要依托“机器人+ai”技术突破传统人工现场作业思路,基于国网变电站新型机器人技术研究与应用试点建设,开展变电站仿生机器人的vr远方操控技术研究,以“安全、可靠、经济、稳定”为目标实现变电站内仿生ai机器人的远方操作,在减少现场作业工作强度的同时,提升变电站设备管理工作的及时性和实时性。
2、现有技术中存在一种机器人底座驱动机构(公开号:cn108943020a),其结构包括驱动机构主体,所述驱动机构主体的前端外表面一侧活动安装有防缠绕套,且防缠绕套的一侧外表面远离驱动机构主体的一侧设有小号转轮,所述防缠绕套的内表面中心活动安装有转动杆,且防缠绕套的内表面靠近转动杆的外侧活动安装有衔接转轴,所述防缠绕套的外表面固定安装有衔接垫,本发明所述的一种机器人底座驱动机构,设有防缠绕套、冷却风扇与防撞弹簧,当转动杆旋转时,防缠绕套会很好的将其转动杆进行包裹,可以对其机器人底座驱动进行保护,当运行时间过长时冷却风扇能很好的进行散热,当防撞弹簧碰触到物体时能很好的减震防撞,带来更好的使用前景。
3、现有技术中还存在一种巡检机器人(公开号:cn116638534a),其结构包括:机器人本体,所述机器人本体上设置有摄像头;升降机构,所述升降机构设置在所述机器人本体和所述摄像头之间,所述升降机构用于调节所述所述摄像头的相对位置,本技术公开了一种巡检机器人,来解决现有的巡检机器人提供的使用效果不理想的问题。
4、上述两个专利文件中均采用滚轮作为机器人的驱动结构,这种滚轮驱动的方式在实际使用过程中对环境的要求较高,需要在平整的地面上移动,在遇到坑洼地面或者地面出现阶梯等环境时便容易出现侧翻或者无法移动等情况,严重降低了机器人的使用范围。
5、因此,有必要提供一种仿生操作机器人的驱动机构解决上述技术问题。
技术实现思路
1、本发明解决的技术问题是提供一种使用方便、具有较佳防护效果、适应更多使用环境的仿生操作机器人的驱动机构。
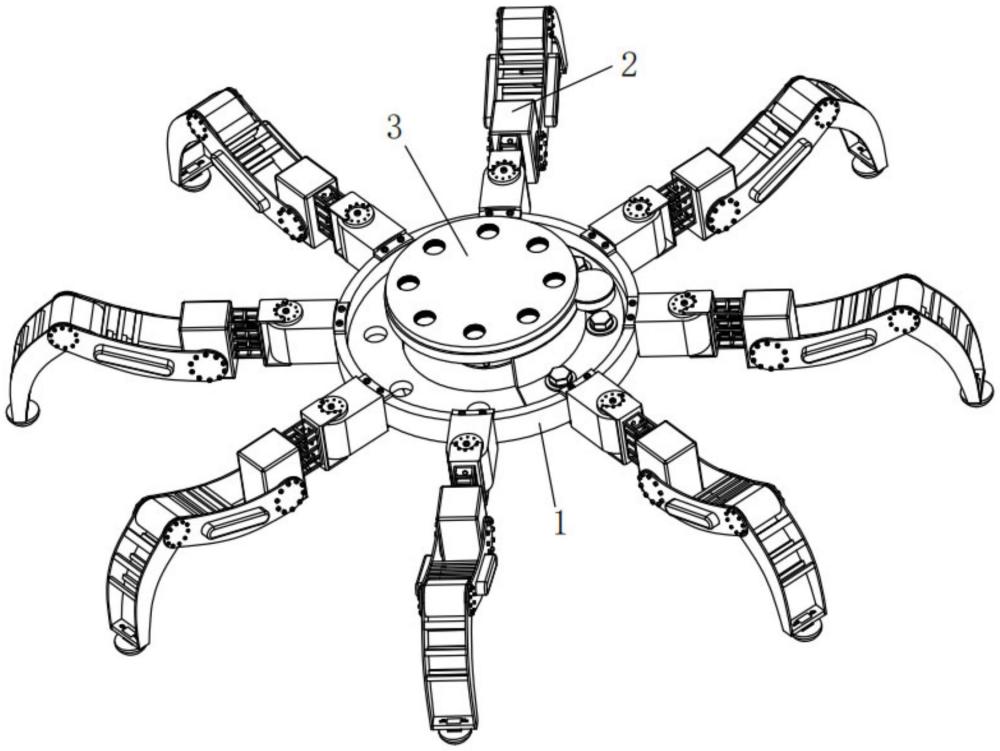
2、为解决上述技术问题,本发明提供的仿生操作机器人的驱动机构,包括:固定盘架和八个驱动爪,八个所述驱动爪均固定安装在所述固定盘架上,八个所述驱动爪呈环形设置,所述固定盘架上固定安装有安装件,所述固定盘架上设置有水流防护驱动机构,八个所述驱动爪上均固定安装有安装块,八个所述安装块上均设置有卡持机构,八个所述安装块的底部均设置有落脚件,多个所述落脚件分别与多个所述卡持机构连接。
3、优选的,所述水流驱动装置包括:气泵、漂浮框、推动框、四个过滤网、四个框型架、四个驱动电机、四个叶轮、气囊、锡纸、输气框和输气管,所述气泵固定安装在所述固定盘架上,所述漂浮框固定安装在所述固定盘架的底部,所述推动框固定安装在所述漂浮框的底部,四个所述过滤网均设置在所述推动框上,四个所述框型架均固定安装在所述推动框的内壁上,四个所述驱动电机分别固定安装在四个所述框型架上,四个所述叶轮分别固定套设在四个所述驱动电机的输出轴上,所述气囊设置在所述漂浮框上,所述锡纸设置在所述漂浮框上,所述输气框固定安装在所述气泵的底部,所述输气管固定安装在所述输气框的一侧外壁上,所述输气管的另一端与所述气囊连通。
4、优选的,所述漂浮框的外圈开设有环形通口,所述锡纸通过胶水粘贴在环形通口的内壁上。
5、优选的,所述驱动爪包括:转动框一、转动架一、转动框二、转动架二、转动框三、转动架三、转动电机一、转动电机二、转动电机三,所述转动框一固定安装在所述固定盘架上,所述转动架一转动安装在转动框一上,所述转动框二固定安装在所述转动架一上,所述转动架二转动安装在所述转动框二上,所述转动框三固定安装在所述转动架二上,所述转动架三转动安装在所述转动框框三上,所述转动电机一固定安装在所述转动框一内,所述转动电机一的输出轴与所述转动架一转动连接,所述转动电机二固定安装在所述转动框二内,所述转动电机二的输出轴与所述转动架二转动连接,所述转动电机三固定安装在所述转动框三内,所述转动电机三的输出轴与所述转动架三转动连接。
6、优选的,所述安装件包括:l型固定架、两个电动推杆二、防护框、转动盘、圆形齿轮一、圆形齿轮二、转动柱、多个螺纹槽、转动电机四,所述l型固定架设置在所述固定盘架上,两个所述电动推杆二固定安装在所述l型固定架上,所述防护框设置在所述l型固定架上,所述防护框的底部与两个所述电动推杆二的伸缩轴固定连接,所述转动盘转动安装在所述防护框的顶部,所述圆形齿轮设置在所述防护框内,所述圆形齿轮二设置在所述防护框内,所述圆形齿轮二与所述圆形齿轮一啮合,所述转动柱转动安装在所述防护框的两侧内壁上,所述圆形齿轮一固定套设在所述转动柱上,所述转动柱的顶端延伸至所述防护框的上方并与所述转动盘的底部固定连接,多个所述螺纹槽均开设在所述转动盘的顶部,多个所述螺纹槽呈环形设置,所述转动电机固定安装在所述防护框的底部,所述转动电机的输出轴延伸至所述防护框内并与所述圆形齿轮二啮合。
7、优选的,所述落脚件由支撑块构成,所述支撑块的底部设为球形,所述卡持机构包括:定位通口、定位块、衔接块、两个卡槽、两个滑动槽、两个卡块、两个t型滑钮和两个加固弹簧,所述定位通口开设在所述安装块的顶部,所述定位块设置在所述定位通口内,所述衔接块滑动安装在所述定位块上,所述衔接块的底部与所述支撑块的顶部固定连接,两个卡槽开设在所述定位块的两侧外壁上,两个所述滑动槽开设在所述定位通口的两侧内壁上,两个所述卡块分别滑动安装在两个所述滑动槽内,两个所述卡块的一侧分别延伸至两个所述卡槽内并分别与两个所述卡槽适配,两个所述t型滑钮均滑动安装在所述安装块上,两个所述t型滑钮的底部分别与两个所述卡块的顶部固定连接,两个所述加固弹簧分别固定安装在两个所述滑动槽的一侧内壁上,两个所述加固弹簧的另一端分别与两个所述卡块的一侧外壁固定连接。
8、优选的,所述定位块的底部开设有缓冲槽,所述衔接块的顶部延伸至所述缓冲槽内并与所述缓冲槽的两侧内壁滑动连接,所述衔接块的顶部固定安装有多个缓冲弹簧,多个所述缓冲弹簧的顶端均与所述缓冲槽的顶部内壁固定连接。
9、优选的,所述支撑块与所述驱动爪活动设置,所述驱动爪上转动安装有调节辊,所述驱动爪的外壁上固定安装有调节电机,所述调节电机的输出轴与所述调节辊的一端固定连接,所述调节辊的外壁上固定安装有四个呈环形设置的安装板,四个所述安装板上均通过锁紧螺栓固定安装有连接筒,所述支撑块与其中一个所述连接筒的一端固定连接,其中一个所述连接筒的一端固定安装有聚合体毛垫,其中一个所述连接筒的一端固定安装有电磁板,其中一个所述连接筒上设置有锥形支脚。
10、优选的,所述锥形支脚由一个衔接板和多个圆锥块构成,多个所述圆锥块均固定安装在所述衔接板的一侧外壁上,所述衔接板的另一侧外壁上固定安装有限位杆,所述限位杆的一端延伸至对应的所述连接筒内并与所述连接筒的内壁滑动连接,所述连接筒的外壁上固定安装有电动推杆一,所述电动推杆一的伸缩轴与所述衔接板的一侧外壁固定连接。
11、优选的,所述连接筒的外壁上固定安装有限位环,所述连接筒的内壁上设置有内螺纹,所述安装板的一侧外壁上开设有连接孔,所述连接筒贯穿所述连接孔并与所述连接孔适配,所述锁紧螺栓的一侧延伸在所述连接筒内并与所述连接筒的内壁螺纹连接。
12、与相关技术相比较,本发明提供的仿生操作机器人的驱动机构具有如下有益效果:
13、本发明提供一种仿生操作机器人的驱动机构,通过八个驱动爪的设置,可以使整个仿生机器人在不同的环境中进行驱动移动,提高真个仿生机器人的使用环境;
14、通过气泵、输气框、漂浮框、推动框、驱动电机、叶轮、气囊和输气管的作用下,可以使整个仿生机器人在水面上移动,从而提高仿生机器人的使用环境。
15、通过安装块、定位通口、定位块、衔接块、卡槽、滑动槽、卡块、t型滑钮和加固弹簧的作用下,可以快速完成支撑块的更换,由此提高仿生机器人的维护效率。
- 还没有人留言评论。精彩留言会获得点赞!