基于无人牵引AMR的自动挂脱钩装置及自动挂脱钩方法与流程
本发明涉及无人牵引设备,尤其是一种基于无人牵引amr的自动挂脱钩装置及其工作方法。
背景技术:
1、在现代工业生产环境中,厂内物流的顺畅运作对于提升整体生产效率、降低运营成本及增强企业竞争力至关重要。
2、然而,现有技术下的物流方式中,当涉及笼车与牵引车的连接与分离作业时,仍存在显著的人工依赖问题。具体来说,每当需要从仓库或生产线取货时,工作人员需要亲自前往指定地点,手动将笼车上的挂钩与牵引车的牵引装置对齐并牢固连接,这一过程不仅耗时耗力,还容易受到人为因素影响,如操作失误或注意力不集中导致的连接不牢等问题;随着货物被牵引车运送至指定的放货位置,如生产线旁或下一个仓储区,又需要工人再次介入,执行解锁操作,小心翼翼地分离笼车与牵引车,确保货物安全卸载且不损坏设备。这一系列挂钩和脱钩解锁的人工操作不仅大大增加了人力成本,使得企业在劳动力密集度上居高不下,同时也限制了物流流程的自动化与智能化发展。
3、在此基础上,研发一种基于无人牵引amr的自动挂脱钩装置及其工作方法是迫在眉睫的。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供基于无人牵引amr的自动挂脱钩装置及其工作方法,从而实现牵引车与笼车间的自动挂钩,自动脱钩动作,解决无人牵引amr在取放货点位需要人工配合的问题,提高无人牵引amr对应用场景的环境适应性及取放货的自主性。
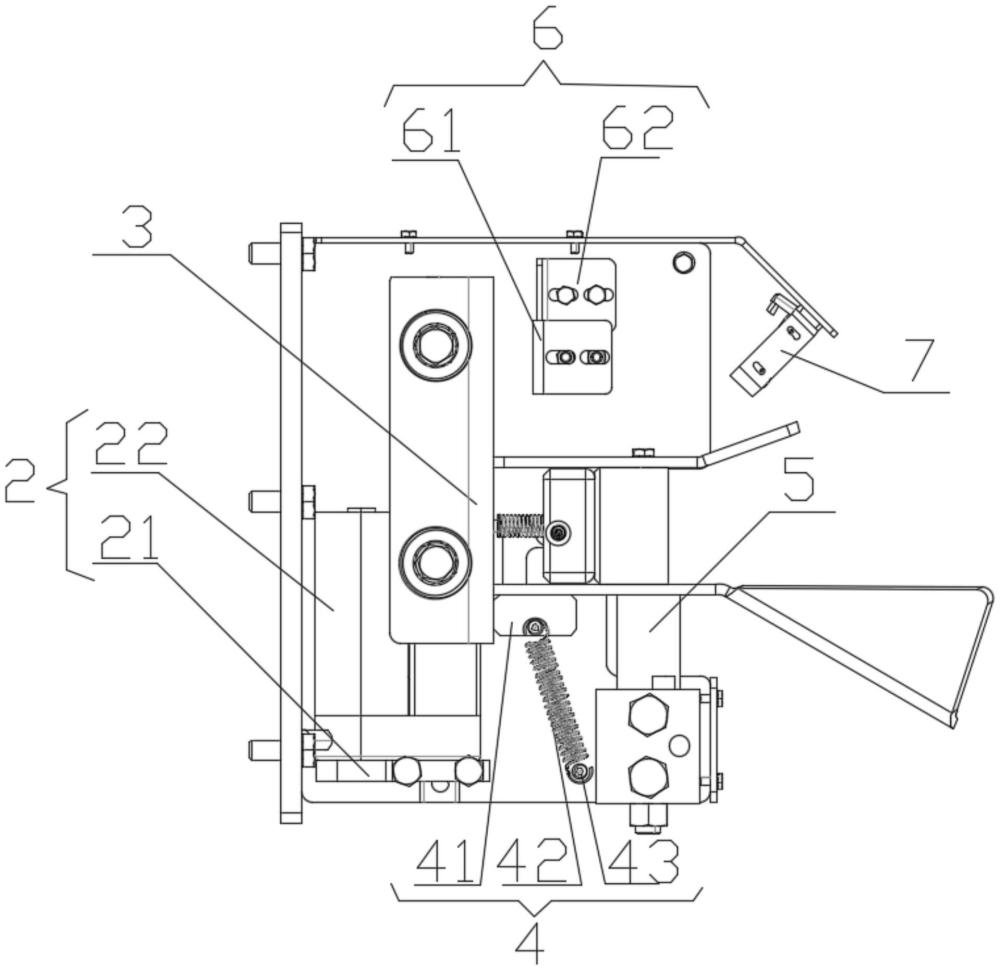
2、本发明所采用的技术方案如下:一种基于无人牵引amr的自动挂脱钩装置,包括与无人牵引amr一侧相接并且在对接过程朝向笼车的框架组件,在所述框架组件内安装有驱动组件,驱动组件用于在竖直方向上带动浮动组件进行位移,在所述浮动组件的底部与复位组件相接;浮动组件被驱动组件顶起时处于上限位状态,上限位状态时浮动组件高于牵引轴的顶部,笼车的牵引杆经过浮动组件的上表面移动至牵引轴的上方;驱动组件收起时,浮动组件经复位组件拉动回到下限位,下限位状态时浮动组件低于牵引轴的顶部,牵引轴穿过笼车牵引杆的牵引孔内。
3、作为上述技术方案的进一步改进:
4、优选的,所述框架组件的结构为:包括与无人牵引amr固定装配的第一连接板,在所述连接板上设有对称布置的侧板,并在顶部设置顶板;通过连接板、侧板和顶板拼接一体化,并形成内部空腔的框体结构。
5、优选的,所述侧板的结构为:包括侧板本体,在所述侧板本体上分别开设有第一导向槽和第二导向槽;所述第一导向槽是沿竖直方向设置的第一槽体;所述第二导向槽包括沿竖直方向设置的第二槽体和沿水平方向设置的第三槽体,所述第二槽体和第三槽体整体形成“┎”形状的槽道。
6、优选的,所述驱动组件的结构为:包括固定在框架组件底部的电机装配座,在电机装配座上安装升降驱动组件。
7、优选的,所述升降驱动组件的结构为:包括与电机装配座固定连接的升降电机固定座,在升降电机固定座上装配升降电机,所述升降电机的顶部设置在竖直方向上下位移的升降输出轴。
8、优选的,所述浮动组件的结构为:包括随驱动组件在竖直方向运动的提升块;在提升块面向驱动组件的一侧设置顶柱,顶柱用于和驱动组件中升降电机的升降输出轴相抵;在提升块远离驱动组件的一侧沿水平方向设置升降板,在升降板上设置有用于牵引轴穿行的通孔,当升降板随提升块在竖直方向运动时,牵引轴从通孔内穿过;在升降板的上表面设置滑块,在滑块面向提升块的一侧设置压缩弹簧,压缩弹簧水平设置,且压缩弹簧的其中一端与提升块相接,另一端与滑块相接;在滑块远离提升块的一侧设置挡块,所述滑块和挡块经压缩弹簧的推力沿升降板的长度方向滑动。
9、优选的,所述滑块和挡块的顶部设置顶盖,在顶盖上设置有限位柱,限位柱用于在滑块的运动方向上进行阻挡;所述升降板在远离提升块的延伸段还设置有开口板,开口板用于在无人牵引amr和笼车的对接过程中引导笼车的牵引杆与挡块接触;在提升块上布置有滚动轴承,滚动轴承位于框架组件的侧板上的第一导向槽内;在滑块的侧壁上布置浮动轴承,浮动轴承位于框架组件的侧板上的第二导向槽内。
10、优选的,所述复位组件的结构为:包括与浮动组件底部固定连接的第二连接板,以及位于框架组件底部固定的拉簧固定轴,在第二连接板和拉簧固定轴之间设置拉簧。
11、优选的,所述浮动组件的一侧还在竖直方向设置到位检测组件,所述到位检测组件的结构为:包括下限位检测器和上限位检测器,所述下限位检测器和上限位检测器正对浮动组件中的提升块方向;在所述框架组件的顶板端部还固定笼车在位检测相机。
12、一种基于无人牵引amr的自动挂脱钩方法,包括自动挂钩流程和自动脱钩流程;
13、所述自动挂钩流程包括以下步骤:
14、步骤一:对无人牵引amr发布amr牵引任务;
15、步骤二:无人牵引amr沿规划路径运行,直至到达笼车的对接点位上,并且调节无人牵引amr的姿态便于挂钩;
16、步骤三:通过笼车在位检测相机识别笼车的牵引杆位置;
17、当笼车的牵引杆的位置情况允许挂钩时,进入步骤四;
18、当笼车的牵引杆的位置情况不允许挂钩时,回到步骤二中重新调整无人牵引amr的姿态,直至允许挂钩;
19、步骤四:进行挂钩动作;
20、首先,升降电机启动并通过升降输出轴抵住顶柱从而带动提升块上升,在过程中滚动轴承沿第一导向槽中竖直上升,浮动轴承在第二导向槽中竖直上升并到达第二导向槽的拐点;
21、同时,压缩弹簧沿水平方向推动滑块使得浮动轴承在第二导向槽的第三槽体内运动直至到达上限位,此时升降板在竖直方向高度高于牵引轴的顶部,挡块位于牵引轴上方,阻挡提升块下滑,升降电机关闭,升降输出轴与顶柱分离;
22、接着,无人牵引amr靠近笼车,使笼车的牵引杆依次经过开口板和升降板的上表面来到牵引轴上方,笼车的牵引杆抵住挡块克服压缩弹簧;从而使滑块伴随浮动轴承回退至第二导向槽的第二槽体与第三槽体交接的节点位置,此时滚动轴承位于第一导向槽的顶部,浮动轴承位于第二槽体的顶部,浮体组件的底部经复位组件中拉簧以及自身重力影响下滑,牵引轴经过升降板上的通孔伸出并穿入笼车牵引杆的牵引孔内,完成牵引轴和笼车牵引杆的挂钩;
23、步骤五:无人牵引amr带动笼车前往放货点;
24、所述自动脱钩流程包括以下步骤:
25、步骤一:对无人牵引amr发布amr脱钩任务;
26、步骤二:无人牵引amr沿规划路径运行,带动笼车到达放货点,调节无人牵引amr的姿态便于脱钩;
27、步骤三:通过笼车在位检测相机识别笼车的牵引杆位置;
28、当笼车的牵引杆的位置情况允许脱钩时,进入步骤四;
29、当笼车的牵引杆的位置情况不允许脱钩时,回到步骤二中重新调整无人牵引amr的姿态,直至允许脱钩;
30、步骤四:进行脱钩动作;
31、首先,升降电机启动并通过升降输出轴抵住顶柱从而带动提升块上升,在过程中滚动轴承沿第一导向槽中竖直上升,浮动轴承在第二导向槽中竖直上升并到达第二导向槽的拐点,此时升降板带动笼车的牵引杆同步上升,牵引轴从牵引孔中穿出并位于升降板的下方;
32、接着,无人牵引amr远离笼车,使笼车的牵引杆依次沿着升降板和开口板的上表面离开,凭借压缩弹簧的弹力使滑块沿着第三槽体的方向水平运动,直至挡块位于牵引轴上方,此时笼车的牵引杆远离浮动组件,完成牵引轴和笼车牵引杆的脱钩;
33、最后,无人牵引amr驶离并前往下一任务点。
34、本发明的有益效果如下:
35、本发明的结构紧凑,通过自动挂脱钩装置实现了无人牵引amr与笼车之间的自动挂钩,自动脱钩动作,解决无人牵引amr在取放货点位需要人工配合的问题,提高无人牵引amr对应用场景的环境适应性及取放货的自主性;同时本发明提高车间、工厂等应用场景物流的自动化、智能化、信息化水平;
36、本发明还具有以下优点:
37、本发明的驱动组件与浮动组件之间是分离式的结构,驱动组件通过输出端抵住浮动组件的顶柱,将浮动组件抬高后,驱动组件关闭,浮动组件依赖压缩弹簧将滑块沿水平方向的第三槽体推动即可保证高度位于牵引轴之上;当牵引杆推动浮动组件中的挡块和滑块回到第二槽体上时,利用浮动组件自身重力和复位组件中拉簧的拉力使浮动组件整体下滑,使得牵引轴通过升降板上的通孔内并穿入牵引杆中完成挂钩动作,整个挂钩流程通过压缩弹簧的弹力推动滑块进行高度限位,通过复位组件拉簧的拉力以及浮动组件自身重力进行复位,结构合理,运动过程稳定且造价成本低。
- 还没有人留言评论。精彩留言会获得点赞!