狭窄场景脱困方法、装置、电子设备及可读存储介质与流程
本公开涉及车辆控制,具体涉及一种狭窄场景脱困方法、装置、电子设备及可读存储介质。
背景技术:
1、随着21世纪智能科技的浪潮,自动驾驶技术逐步从梦想走向现实,自动泊车辅助系统(auto parkig assist,apa)作为其中的重要组成部分,已经成为现代汽车智能化的关键标志之一。apa系统通过集成先进的传感器和复杂的算法,使得车辆能够自主识别车位并执行泊车操作,极大地提升了驾驶体验,为驾驶员带来了前所未有的便利。
2、然而,尽管apa泊车技术已经取得了显著的进步,但在面对一些狭窄场景时,例如道路狭窄、目标车位对面有车、车位狭窄等,常规的规划算法往往难以规划出一条既合理又安全的路径。
技术实现思路
1、有鉴于此,本公开一个或者多个实施方式提供了一种狭窄场景脱困方法、装置、电子设备及可读存储介质,能够使得车辆安全、有效地脱离狭窄场景。
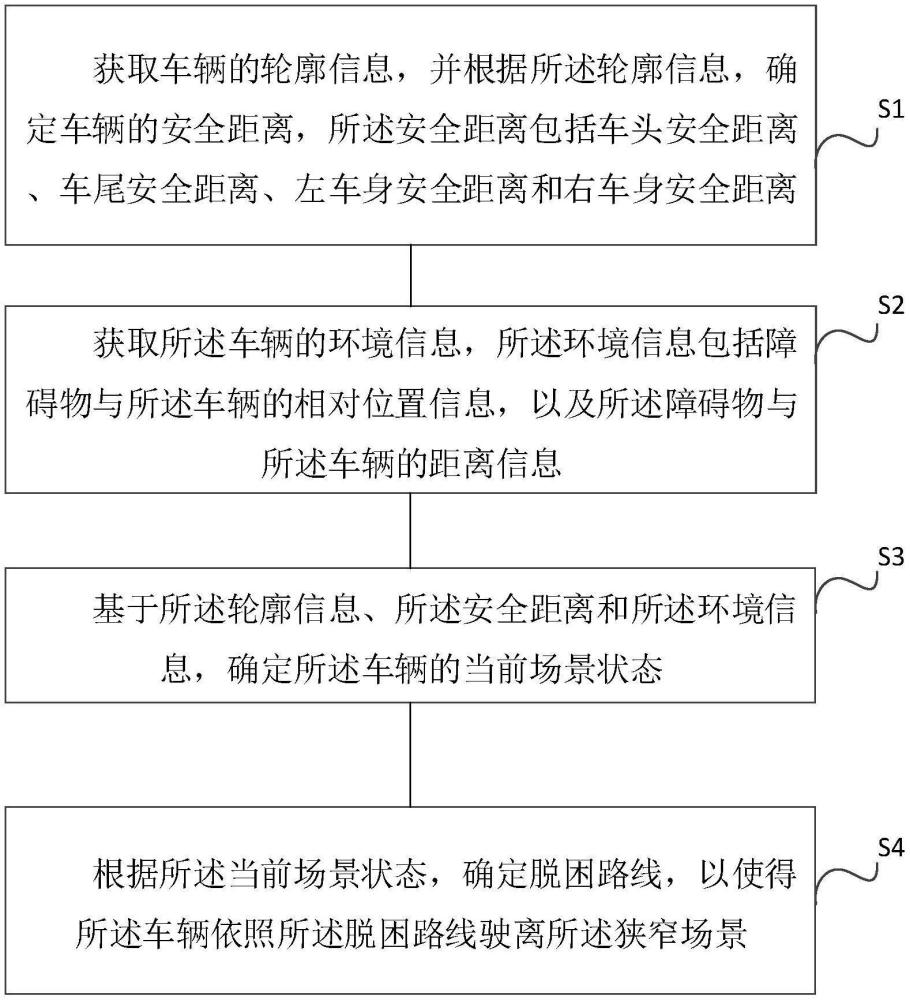
2、本公开一方面提供了一种狭窄场景脱困方法,所述方法包括:获取车辆的轮廓信息,并根据所述轮廓信息,确定车辆的安全距离,所述安全距离包括车头安全距离、车尾安全距离、左车身安全距离和右车身安全距离;获取所述车辆的环境信息,所述环境信息包括障碍物与所述车辆的相对位置信息,以及所述障碍物与所述车辆的距离信息;基于所述轮廓信息、所述安全距离和所述环境信息,确定所述车辆的当前场景状态;根据所述当前场景状态,确定脱困路线,以使得所述车辆依照所述脱困路线驶离所述狭窄场景。
3、可选地,若所述车辆的车头与车头障碍物的距离小于所述车头安全距离,且所述车辆的车尾与车尾障碍物的距离大于1米,则确定所述脱困路线为直线后退式。
4、可选地,若所述车辆的车身左右两侧均有侧方障碍物、所述车辆的后方空间大于一米,且所述车辆的后半车身的左右两侧没有所述侧方障碍物,则确定所述脱困路线为直线后退式;其中,所述车辆的后方空间表征所述车辆的车尾与车尾障碍物的距离。
5、可选地,若所述车辆的车身左右至少一侧有所述侧方障碍物、所述车辆的后方空间大于一米、所述车辆的前半车身与所述侧方障碍物的距离小于所述车辆的后半车身与所述侧方障碍物的距离,且所述车辆的后方空间比所述车辆的前方空间大于4.5米,则确定所述脱困路线为直线后退式;其中,所述车辆的后方空间表征所述车辆的车尾与车尾障碍物的距离,所述车辆的前方空间表征所述车辆的车头与车头障碍物的距离。
6、可选地,若所述车辆的车尾与车尾障碍物的距离小于所述车尾安全距离、所述车辆的车头与车头障碍物的距离大于1米,且所述车辆的前半车身的左右两侧没有侧方障碍物,则确定所述脱困路线为直线前进式。
7、可选地,若所述车辆的后半车身的左右至少一侧有所述侧方障碍物、所述车辆的前半车身的左右两侧没有所述侧方障碍物,且所述车辆的前方空间大于所述车辆的车身长度的一半,则确定所述脱困路线为直线前进式;其中,所述车辆的前方空间表征所述车辆的车头与车头障碍物的距离。
8、可选地,若所述车辆的车头与车头障碍物的距离小于0.5米、所述车辆的左侧车尾或右侧车尾与车尾障碍物的距离大于1米,且所述车辆的前半车身的左右至少一侧有侧方障碍物,则确定所述脱困路线为转弯后退式。
9、可选地,当所述车辆的前半车身的左右两侧与所述侧方障碍物的距离同时小于所述左车身安全距离与所述右车身安全距离时,若所述车辆的左侧车尾与车尾左侧障碍物的距离大于所述车辆的右侧车尾与车尾右侧障碍物的距离,则确定所述脱困路线为左转弯后退式。
10、可选地,当所述车辆的前半车身的左右两侧与所述侧方障碍物的距离同时小于所述左车身安全距离与所述右车身安全距离时,若所述车辆的右侧车尾与车尾右侧障碍物的距离大于所述车辆的左侧车尾与车尾左侧障碍物的距离,则确定所述脱困路线为右转弯后退式。
11、可选地,当所述车辆的前半车身的右侧与所述侧方障碍物的距离小于所述右车身安全距离时,若所述车辆的左侧车尾与车尾左侧障碍物的距离大于所述车辆的右侧车尾与车尾右侧障碍物的距离,则确定所述脱困路线为左转弯后退式。
12、可选地,当所述车辆的前半车身的右侧与所述侧方障碍物的距离小于所述右车身安全距离时,若所述车辆的右侧车尾与车尾右侧障碍物的距离大于所述车辆的左侧车尾与车尾左侧障碍物的距离,则确定所述脱困路线为右转弯后退式。
13、可选地,当所述车辆的前半车身的左侧与所述侧方障碍物的距离小于所述左车身安全距离时,若所述车辆的右侧车尾与车尾右侧障碍物的距离大于所述车辆的左侧车尾与车尾左侧障碍物的距离,则确定所述脱困路线为右转弯后退式。
14、可选地,当所述车辆的前半车身的左侧与所述侧方障碍物的距离小于所述左车身安全距离时,若所述车辆的左侧车尾与车尾左侧障碍物的距离大于所述车辆的右侧车尾与车尾右侧障碍物的距离,则确定所述脱困路线为左转弯后退式。
15、可选地,当所述车辆的车身左右两侧与侧方障碍物的距离同时小于所述左车身安全距离与所述右车身安全距离时,若所述车辆的前半车身的右侧没有所述侧方障碍物,且所述车辆的车头与车头右侧障碍物的距离大于第一预设距离,则确定所述脱困路线为右转弯前进式。
16、可选地,当所述车辆的车身左右两侧与侧方障碍物的距离同时小于所述左车身安全距离与所述右车身安全距离时,若所述车辆的前半车身的左侧没有所述侧方障碍物,且所述车辆的车头与车头左侧障碍物的距离大于所述第一预设距离,则确定所述脱困路线为左转弯前进式。
17、可选地,当所述车辆的车身左侧与侧方障碍物的距离小于所述左车身安全距离时,若所述车辆的前半车身的左右两侧没有所述侧方障碍物,且所述车辆的车头与车头障碍物的距离大于0.8米,则确定所述脱困路线为右转弯前进式。
18、可选地,当所述车辆的车身左侧与侧方障碍物的距离小于所述左车身安全距离时,若所述车辆的前半车身的左右两侧没有所述侧方障碍物,且所述车辆的右侧车头与车头右侧障碍物的距离大于第二预设距离、所述车辆的右侧车头与车头右侧障碍物的距离大于所述车辆的左侧车头与车头左侧障碍物的距离,则确定所述脱困路线为右转弯前进式。
19、可选地,当所述车辆的车身左侧与侧方障碍物的距离小于所述左车身安全距离时,若所述车辆的前半车身的左右两侧没有所述侧方障碍物,且所述车辆的左侧车头与车头左侧障碍物的距离大于所述第二预设距离、所述车辆的左侧车头与车头左侧障碍物的距离大于所述车辆的右侧车头与车头右侧障碍物的距离,则确定所述脱困路线为左转弯前进式。
20、可选地,当所述车辆的车身左侧与侧方障碍物的距离小于所述左车身安全距离时,若所述车辆的前半车身的左侧有所述侧方障碍物,且所述车辆的右侧车头与车头右侧障碍物的距离大于所述车头安全距离,则确定所述脱困路线为右转弯前进式。
21、可选地,当所述车辆的车身左侧与侧方障碍物的距离小于所述左车身安全距离时,若所述车辆的前半车身的左侧有所述侧方障碍物,且所述车辆的右侧车头与车头右侧障碍物的距离不大于所述车头安全距离,则确定所述脱困路线为左转弯前进式。
22、可选地,当所述车辆的车身右侧与侧方障碍物的距离小于所述右车身安全距离时,若所述车辆的前半车身的左右两侧没有所述侧方障碍物,且所述车辆的车头与车头障碍物的距离大于0.8米,则确定所述脱困路线为左转弯前进式。
23、可选地,当所述车辆的车身右侧与侧方障碍物的距离小于所述右车身安全距离时,若所述车辆的前半车身的左右两侧没有所述侧方障碍物,且所述车辆的左侧车头与车头左侧障碍物的距离大于第二预设距离、所述车辆的左侧车头与车头左侧障碍物的距离大于所述车辆的右侧车头与车头右侧障碍物的距离,则确定所述脱困路线为左转弯前进式。
24、可选地,当所述车辆的车身右侧与侧方障碍物的距离小于所述右车身安全距离时,若所述车辆的前半车身的左右两侧没有所述侧方障碍物,且所述车辆的右侧车头与车头右侧障碍物的距离大于所述第二预设距离、所述车辆的右侧车头与车头右侧障碍物的距离大于所述车辆的左侧车头与车头左侧障碍物的距离,则确定所述脱困路线为右转弯前进式。
25、可选地,当所述车辆的车身右侧与侧方障碍物的距离小于所述右车身安全距离时,若所述车辆的前半车身的右侧有所述侧方障碍物,且所述车辆的左侧车头与车头左侧障碍物的距离大于所述车头安全距离,则确定所述脱困路线为左转弯前进式。
26、可选地,当所述车辆的车身右侧与侧方障碍物的距离小于所述右车身安全距离时,若所述车辆的前半车身的右侧有所述侧方障碍物,且所述车辆的左侧车头与车头左侧障碍物的距离不大于所述车头安全距离,则确定所述脱困路线为右转弯前进式。
27、本公开另一方面还提供了一种狭窄场景脱困装置,所述装置包括:第一获取单元,用于获取车辆的轮廓信息,并根据所述轮廓信息,确定车辆的安全距离,所述安全距离包括车头安全距离、车尾安全距离、左车身安全距离和右车身安全距离;第二获取单元,用于获取所述车辆的环境信息,所述环境信息包括障碍物与所述车辆的相对位置信息,以及所述障碍物与所述车辆的距离信息;信息处理单元,用于基于所述轮廓信息、所述安全距离和所述环境信息,确定所述车辆的当前场景状态;路线规划单元,用于根据所述当前场景状态,确定脱困路线,以使得所述车辆依照所述脱困路线驶离所述当前狭窄场景。
28、本公开另一方面还提供了一种电子设备,所述电子设备包括存储器和处理器,所述存储器用于存储计算机程序,所述计算机程序被所述处理器执行时,实现上述的狭窄场景脱困方法。
29、本公开另一方面还提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序被处理器执行时,实现上述的狭窄场景脱困方法。
30、本公开一个或者多个实施方式提供的技术方案,可以利用车辆的轮廓信息,确定该车辆的一些安全距离。随后,结合车辆的轮廓信息、车来那个的安全距离、车辆周遭环境中的障碍物信息,可以确定车辆的当前场景状态。根据不同的车辆场景状态,可以规划出不同的脱困路线。如此,当车辆困在某些狭窄场景中时,可以通过确定出的脱困路线,帮助车辆安全、有效地驶离该狭窄场景。
- 还没有人留言评论。精彩留言会获得点赞!