一种轨道车辆、轨道车辆制动控制方法和系统与流程
本技术涉及轨道车辆,特别涉及一种轨道车辆、轨道车辆制动控制方法和轨道车辆制动控制系统。
背景技术:
1、目前,轨道车辆安全制动过程的涡流制动阶段,各车涡流制动控制器仅根据硬线指令施加相应的制动电流,各车施加的制动力大小没有差别。然而,由于没有统一的制动力管理及分配控制,且由于各车厢的车重(载荷)不同,在实际制动过程中,容易导致不同车厢的制动效果出现差异,造成车厢间产生纵向冲击力。
2、因此,如何避免轨道车辆涡流制动过程中车厢间产生纵向冲击力,是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本技术的目的是提供一种轨道车辆、轨道车辆制动控制方法和轨道车辆制动控制系统,解决了轨道车辆涡流制动过程中车厢间产生纵向冲击力的问题。
2、为实现上述目的,本技术提供一种轨道车辆制动控制方法,包括:
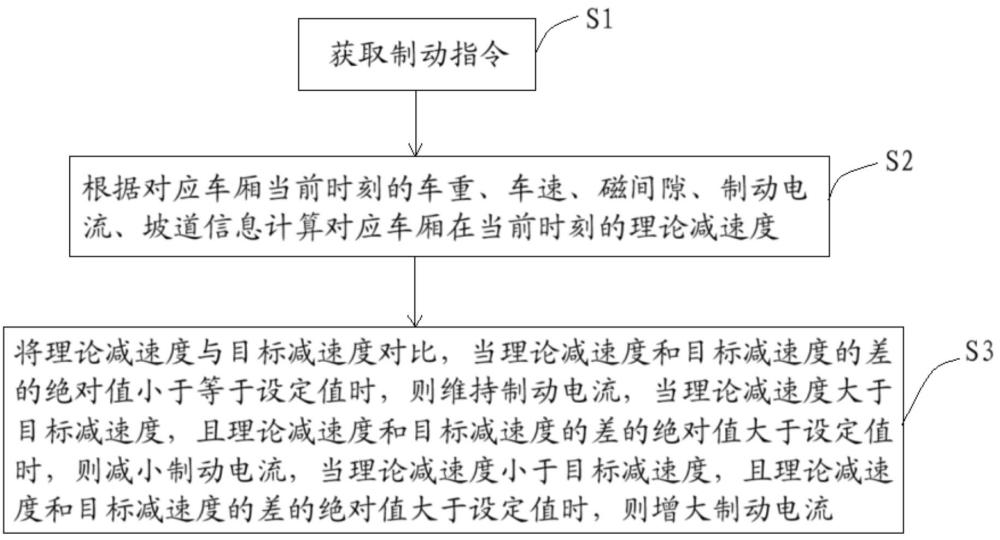
3、获取制动指令;
4、根据对应车厢当前时刻的车重、车速、磁间隙、制动电流、坡道信息计算对应车厢在当前时刻的理论减速度;
5、将所述理论减速度与目标减速度对比,当所述理论减速度和所述目标减速度的差的绝对值小于等于设定值时,则维持所述制动电流,当所述理论减速度大于所述目标减速度,且所述理论减速度和所述目标减速度的差的绝对值大于设定值时,则减小所述制动电流,当所述理论减速度小于所述目标减速度,且所述理论减速度和所述目标减速度的差的绝对值大于设定值时,则增大所述制动电流。
6、在一些实施例中,所述根据对应车厢当前时刻的车重、车速、磁间隙、制动电流、坡道信息计算对应车厢在当前时刻的理论减速度的步骤,包括:
7、根据所述车速、所述磁间隙和所述制动电流计算得出涡流制动力、摩擦制动力、空气动力学行驶阻力、磁化行驶阻力、直线发电机行驶阻力;
8、根据所述坡道信息计算得出坡道阻力;
9、根据所述涡流制动力、所述摩擦制动力、所述空气动力学行驶阻力、所述磁化行驶阻力、所述直线发电机行驶阻力和所述坡道阻力计算得出制动力总和;
10、根据所述车重和所述制动力总和计算得出所述理论减速度。
11、在一些实施例中,所述根据对应车厢当前时刻的车重、车速、磁间隙、制动电流、坡道信息计算对应车厢在当前时刻的理论减速度的步骤之前,还包括:
12、通过压力传感器采集轨道车辆各空气弹簧的空气压力,并将所述空气压力反馈至对应车厢的涡流制动控制器,以供所述涡流制动控制器计算得到所述车重。
13、在一些实施例中,所述根据对应车厢当前时刻的车重、车速、磁间隙、制动电流、坡道信息计算对应车厢在当前时刻的理论减速度的步骤之前,还包括:
14、通过绝对位置传感器和相对位置传感器采集得到所述车速;
15、通过激光位移传感器检测制动电磁铁磨耗板和导向轨的所述磁间隙;
16、通过所述涡流制动控制器计算得到所述涡流制动力、所述摩擦制动力、所述空气动力学行驶阻力、所述磁化行驶阻力、所述直线发电机行驶阻力。
17、在一些实施例中,所述获取制动指令的步骤之后,还包括:
18、按照预设的电流增加速率提高对应车厢的制动电流。
19、在一些实施例中,所述获取制动指令,具体为:
20、获取运控系统向对应车厢发出的制动级位或目标减速度指令。
21、本技术还提供一种轨道车辆制动控制系统,采用上述任一项所述的轨道车辆制动控制方法,所述轨道车辆制动控制系统包括设于对应车厢的涡流制动控制模组,所述涡流制动控制模组包括:
22、指令获取模块,用于获取制动指令;
23、减速度运算模块,用于根据对应车厢当前时刻的车重、车速、磁间隙、制动电流、坡道信息计算对应车厢在当前时刻的理论减速度;
24、制动电流控制模块,用于将所述理论减速度与目标减速度对比,且用于当所述理论减速度和所述目标减速度的差的绝对值小于等于设定值时维持所述制动电流、当所述理论减速度大于所述目标减速度且所述理论减速度和所述目标减速度的差的绝对值大于设定值时减小所述制动电流、当所述理论减速度小于所述目标减速度且所述理论减速度和所述目标减速度的差的绝对值大于设定值时增大所述制动电流。
25、在一些实施例中,所述轨道车辆制动控制系统还包括设于对应车厢的两个涡流制动电磁铁,所述涡流制动控制模组包括两组涡流制动控制器,两组所述涡流制动控制器分别为两个所述涡流制动电磁铁上配置的磁极提供制动电流。
26、在一些实施例中,至少两个所述涡流制动控制器包括所述指令获取模块、所述减速度运算模块和所述制动电流控制模块。
27、本技术还提供一种轨道车辆,包括上述任一项所述的轨道车辆制动控制系统。
28、相对于上述背景技术,本技术实施例所提供的轨道车辆制动控制方法,包括:获取制动指令,根据对应车厢当前时刻的车重、车速、磁间隙、制动电流、坡道信息计算对应车厢在当前时刻的理论减速度,将理论减速度与目标减速度对比,当理论减速度和目标减速度的差的绝对值小于等于设定值时,则维持制动电流,当理论减速度大于目标减速度,且理论减速度和目标减速度的差的绝对值大于设定值时,则减小制动电流,当理论减速度小于目标减速度,且理论减速度和目标减速度的差的绝对值大于设定值时,则增大制动电流。
29、同时,本技术实施例所提供的轨道车辆制动控制系统,采用上述轨道车辆制动控制方法,轨道车辆制动控制系统包括设于对应车厢的涡流制动控制模组,涡流制动控制模组包括指令获取模块、减速度运算模块和制动电流控制模块。其中,指令获取模块用于获取制动指令,减速度运算模块与指令获取模块通信相连,减速度运算模块用于根据对应车厢当前时刻的车重、车速、磁间隙、制动电流、坡道信息计算对应车厢在当前时刻的理论减速度,制动电流控制模块与减速度运算模块通信相连,制动电流控制模块用于将理论减速度与目标减速度对比,且用于当理论减速度和目标减速度的差的绝对值小于等于设定值时维持制动电流、当理论减速度大于目标减速度且理论减速度和目标减速度的差的绝对值大于设定值时减小制动电流、当理论减速度小于目标减速度且理论减速度和目标减速度的差的绝对值大于设定值时增大制动电流。
30、可以理解的是,首先,为实现目的地停车,系统会获取来自司控器或运控系统的制动指令,系统会实时监测各车厢的车重、车速、磁间隙、制动电流、坡道信息等参数,根据监测到的参数,系统会计算出对应车厢在当前时刻的理论减速度,这一计算考虑了不同车厢的动态特性和制动需求,与此同时,系统会设定一个目标减速度,此目标减速度为期望达到的减速度,用以实现平稳且有效的制动,从而实现目的地停车,之后,系统将理论减速度与目标减速度进行对比,并通过对比结果调整制动电流,这样可以更精确地控制制动力度。
31、如此设置的轨道车辆制动控制方法和系统,其有益效果主要包括:本技术能够根据单车厢的载荷以及制动需求,通过实时调整对应车厢的制动电流,可以更灵活、精确地调节对应单车的制动力,并适应性调配其余车厢的制动力,从而实现各个车厢的减速度一致,减小各车厢间纵向力,同时实现了轨道车辆涡流制动力的统一分配和管理,提高了轨道车辆的制动性能和安全性,保证了列车的安全运行。
- 还没有人留言评论。精彩留言会获得点赞!