智驾冗余的电机控制器,控制方法和电动汽车与流程
本技术涉及新能源汽车领域,并且更具体地,涉及一种智驾冗余的电机控制器,控制方法和电动汽车。
背景技术:
1、随着智能驾驶的日渐成熟,驾驶便利性提高的同时,安全问题也日益凸显。
2、当前智能驾驶控制的所有功能均位于智驾控制器中,如果在车辆行驶过程中,智驾控制器因各种原因失效宕机、降级或退出时,需要驾驶员进行快速接管,而驾驶员接管通常需要秒级别的时间,在智驾控制器失效到驾驶员接管之前的时间内整车可能处于不可控的状态,影响驾驶安全。
3、因此,如何提高智能驾驶的安全性是需要解决的问题。
技术实现思路
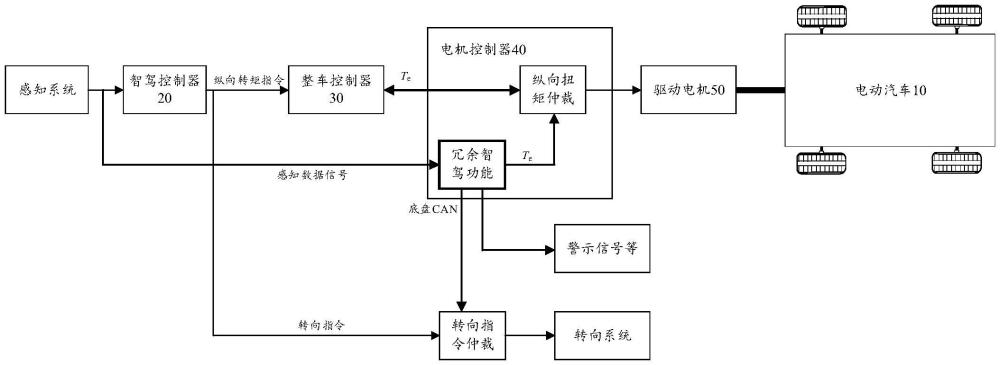
1、本技术提供一种智驾冗余的电机控制器,控制方法和电动汽车,通过在电机控制器中对智驾系统进行备份,将智驾感知系统的相关信号接入电机控制器,使电驱动系统中部署有冗余智驾功能,在智驾控制失效、人驾接管的过程中继续控制车辆正常运行,为整车提供整车级智驾冗余备份功能,提升整车安全性。
2、第一方面,本技术提供了一种智驾冗余的电机控制器,该电机控制器用于控制电动汽车的驱动电机输出扭矩以驱动电动汽车的车轮。电机控制器用于响应于人驾扭矩信号,控制驱动电机输出人驾扭矩信号所指示的扭矩值,人驾扭矩信号所指示的扭矩值随用户操作油门踏板的开度的变化而变化。响应于智驾扭矩信号,控制驱动电机输出智驾扭矩信号所指示的扭矩值,智驾扭矩信号所指示的扭矩值由电动汽车的智驾控制器根据电动汽车的感知系统指示的感知数据信号进行调整。电机控制器还用于接收电动汽车的感知系统指示的感知数据信号并根据感知数据信号控制驱动电机调整扭矩输出。
3、该电机控制器适用于电动汽车或混合动力车辆,该电动汽车可以是分布式电机或集中式电机架构,拥有多个驱动电机和多个电机控制器,该电机控制器可以是多个电机控制器中的任意一个。驱动电机可以是轮边电机,也可以是轮毂电机,该驱动电机可以独立驱动电动汽车的一个车轮。电机控制器可以向驱动电机输出三相交流电,从而控制驱动电机输出扭矩。
4、电动汽车的感知系统可以用于检测电动汽车周围的环境以及电动汽车的运行状态信息。感知系统可以包括摄像头、激光雷达、毫米波雷达等传感器用于负责感知周围的环境,并进行环境信息与车内信息的采集与处理,主要涉及道路边界监测、车辆检测、行人检测等技术。感知系统还可以包括车速传感器、加速度传感器、惯性测量单元等传感器用于检测车身状态和电动汽车行驶信息。
5、感知数据信号可以包括相对距离、相对车速、相对加速度、车道信息等信息。感知信号还可以包括电动汽车速度、加速度、侧倾角、横摆角等信息。
6、本技术中的智驾控制器可以是用于实现感知、定位、路径规划、决策控制等功能的域控制器。本技术中的油门踏板也可以称为电门踏板或加速踏板。油门踏板的开度可以指示用户即驾驶员需求的驱动力大小,当油门踏板的开度越大,驾驶员对驱动的需求越大,所对应的需要驱动电机输出的扭矩也越大。
7、电机控制器可以在三种工作模式下分别工作。当电机控制器处于人驾模式,此时由用户即驾驶员操作电动汽车,当用户踩下油门踏板,整车控制器采集油门踏板的开度后,根据油门踏板的开度生成人驾扭矩信号发送给电机控制器,从而电机控制器根据油门踏板的开度控制驱动电机输出油门踏板开度所指示的扭矩,电机控制器控制驱动电机输出的扭矩油门踏板的开度的变化而变化。当油门踏板的开度越大,驱动电机输出的扭矩越大,当油门踏板的开度越小,驱动电机输出的扭矩越小。
8、当电机控制器处于智驾模式,此时由电动汽车的智驾控制器进行智能主动驾驶或辅助用户进行驾驶,在智驾模式下,电动汽车可以在极少或者没有来自驾驶员的控制输入的情况下在地理区域上自主行驶,即用户可以极少或不操作油门踏板、制动踏板和方向盘的情况下,由智驾控制器接收电动汽车感知部件例如雷达、摄像头等传感器发送的感知数据信号。智驾控制器对各类传感器感知的信息进行融合并根据感知数据信号获取电动汽车的行驶状态和车道信息,通过解析距离、速度、加速度等信号,得到目标加速度和目标速度等,基于融合后的信息做出驾驶决策/规划,下发操作命令给整车控制器,由整车控制器发送智驾扭矩信号给电机控制器,从而电机控制器输出智驾扭矩信号所指示的扭矩值,完成智能驾驶。
9、当电机控制器处于冗余智驾模式,由电机控制器接收电动汽车的感知系统指示的感知数据信号,并由电机控制器根据感知数据信号获取电动汽车的行驶状态和车道信息,通过解析距离、速度、加速度等信号,得到目标加速度和目标速度等,基于融合后的信息做出驾驶决策/规划,并直接控制驱动电机调整输出扭矩。此时电机控制器能够完成智驾模式下智驾控制器控制驱动电机扭矩的功能和工作。
10、根据本技术的方案,电动汽车的电机控制器集成冗余智驾功能,能够独立接收感知数据信号,并根据感知数据信号进行扭矩控制,提高了智驾控制的冗余度,提升整车安全性。
11、结合第一方面,在第一方面的某些实现方式中,电机控制器具体用于在根据智驾扭矩信号控制驱动电机输出扭矩的过程中,当智驾控制器失效且用户未操作油门踏板的开度、制动踏板的开度或者方向盘的转角,停止根据智驾扭矩信号控制驱动电机输出扭矩并根据感知数据信号控制驱动电机调整输出扭矩。
12、在电动汽车以智驾模式行驶的过程中,智驾控制器根据感知数据信号确定电动汽车的驱动扭矩,从而电机控制器响应于智驾扭矩信号控制驱动电机输出扭矩。当智驾控制器因各种失效宕机、降级或退出控制时,智驾控制器会停止工作,导致无法继续进行智驾模式下的控制,此时需要驾驶员快速接管,而驾驶员接管通常需要秒级别的时间,在驾驶员接管之前,电动汽车可能处于不可控的状态,影响驾驶安全。智驾控制器失效的原因,可以是硬件发生故障,也可以是软件运行异常或崩溃,导致的智驾控制器无法继续进行智能驾驶控制而退出智驾系统,本技术对智驾控制器失效的原因不作具体限定。
13、由于电机控制器具有冗余智驾功能,因此当智驾控制器失效,且人驾暂未接管时,即用户未操作油门踏板的开度、制动踏板的开度或者方向盘的转角,此时电机控制器无法接收到智驾扭矩信号,电机控制器可以切换至冗余智驾模式,由电机控制器直接根据感知数据信号控制驱动电机调整输出扭矩。在人驾接管前,由电机控制器接替智驾控制器继续进行智驾控制,保障了电动汽车的行驶安全。
14、应理解地,在智驾模式下,电机控制器与智驾控制器可以同步接收感知系统指示的感知数据信号,电机控制器实时接收感知系统下发的距离、车速、加速度和车道信息等信号,并在后台实时计算驱动电机扭矩。当电机控制器由智驾模式切换到冗余智驾模式下时,可以立即根据接收到的感知数据信号对驱动电机的输出扭矩进行调整,从而减少扭矩计算时间。
15、根据本技术的方案,电动汽车的电机控制器集成冗余智驾功能,能够独立接收感知数据信号,在整车智驾模式下备份运行。当整车智驾控制器失效后,人驾接管前,电机控制器能够快速切换,实现冗余智驾模式接管,减小宕机时间,降低电动汽车失控风险,提高车辆安全性。
16、结合第一方面,在第一方面的某些实现方式中,电机控制器用于在根据感知数据信号控制驱动电机输出扭矩的过程中,当用户操作的油门踏板的开度、制动踏板的开度或者方向盘的转角发生变化,停止根据感知数据信号控制驱动电机调整扭矩输出并控制驱动电机输出人驾扭矩信号所指示的扭矩值。
17、当电机控制器处于冗余智驾模式下,根据感知数据信号控制驱动电机调整扭矩输出,此时用户尚未接管电动汽车的控制,未操作油门踏板、制动踏板和方向盘。如果驾驶员介入了控制,操控了油门踏板、制动踏板或方向盘,从而用户操作的油门踏板的开度、制动踏板的开度或者方向盘的转角发生变化,可以认为人驾进行了接管,电动汽车从冗余智驾模式切换到人驾模式,电机控制器不再根据感知数据信号控制驱动电机调整扭矩,而是直接根据驾驶员的控制,响应于人驾扭矩信号,输出油门踏板的开度所指示的扭矩。
18、应理解地,电动汽车通常以人驾的优先级最高,当检测到驾驶员介入控制时,电机控制器会优先响应驾驶员的操作输出扭矩。当智驾控制器失效时,电动汽车会向用户发出提示信息,当用户接收到提示信息后会进行接管,从而电机控制器响应于驾驶员的操作信息,进入人驾模式,停止根据感知数据信号控制驱动电机调整扭矩输出并控制驱动电机输出人驾扭矩信号所指示的扭矩值。
19、根据本技术的方案,在智驾控制器失效宕机后,在人驾接管前,由电机控制器实现冗余智驾功能控制整车继续运行,避免整车失控,当人驾及时接管,电机控制器根据人驾操作控制出车辆,提高了车辆安全性。
20、结合第一方面,在第一方面的某些实现方式中,电机控制器还用于根据感知数据信号控制电动汽车的转向系统调整电动汽车的行驶方向。
21、在电动汽车以智驾模式行驶的过程中,此时由电动汽车的智驾控制器进行智能主动驾驶或辅助用户进行驾驶。在智驾模式下,电动汽车可以在极少或者没有来自驾驶员的控制输入的情况下在地理区域上自主行驶,即用户可以极少或不操作油门踏板、制动踏板和方向盘的情况下,由智驾控制器接收电动汽车感知部件例如雷达、摄像头等传感器发送的感知数据信号。智驾控制器对各类传感器感知的信息进行融合并根据感知数据信号获取电动汽车的行驶状态和车道信息,通过解析距离、速度、加速度等信号,得到目标转向角或转向助力转矩等,基于融合后的信息做出驾驶决策/规划,下发操作命令转向系统,由转向系统执行转向指令,实现整车维持当前车道或进行变道的功能,完成智能驾驶。
22、当电机控制器处于冗余智驾模式,由电机控制器接收电动汽车的感知系统指示的感知数据信号,并由电机控制器根据感知数据信号获取电动汽车的行驶状态和车道信息,通过解析距离、速度、加速度等信号,得到目标转向角或转向助力转矩等,基于融合后的信息做出驾驶决策/规划,并控制转向系统调整电动汽车的行驶方向。此时电机控制器能够完成智驾模式下智驾控制器控制转向的功能和工作。
23、在一些可能的实施例中,电机控制器可以接入电动汽车的底盘控制器局域网总线(controller area network,can)或高速容错网络协议(flexray)等通信线路,并通过总线向转向系统发送转向指令。
24、在另一些可能的实施例中,电机控制器可以先将转向指令发送给整车控制器,再由整车控制器通过总线转发至转向系统。
25、根据本技术的方案,电动汽车的电机控制器集成冗余智驾功能,能够独立接收感知数据信号,并根据感知数据信号进行转向控制,提高了智驾控制的冗余度,提升整车安全性。
26、结合第一方面,在第一方面的某些实现方式中,电机控制器用于响应于根据电动汽车的感知系统指示的感知数据信号控制驱动电机调整扭矩输出的持续预设时长,控制转向系统使电动汽车向行驶方向的一侧靠近并控制驱动电机降低输出扭矩以使电动汽车停车。
27、当电机控制器处于冗余智驾模式下,根据感知数据信号控制驱动电机调整扭矩输出,此时用户尚未接管电动汽车的控制,未操作油门踏板、制动踏板和方向盘。如果驾驶员长时间未介入控制,在预设时长内用户操作的油门踏板开度、制动踏板开度或方向盘的转角均为发生变化,电机控制器可以在冗余智驾功能下生成一条靠边停车的路径,并根据生成的路径控制驱动电机输出的扭矩和转向系统完成靠边停车的过程。电机控制器控制转向系统使电动汽车向行驶方向的一侧靠近并控制驱动电机降低输出扭矩以使电动汽车停车。
28、应理解地,电机控制器的算力可能要低于智驾控制器,因此在智驾控制器失效后,电机控制器可以在预设时长内进行冗余智驾控制,该预设时长可以根据电机控制器的能力进行设定,如果预设时长之内人驾都没有接管,那么电机控制器可以停止继续进行冗余智驾,利用冗余智驾功能生成一条靠边停车的路径并控制电动汽车停车。
29、根据本技术的方案,在智驾控制器失效宕机后,人驾接管长时间没有接管,由电机控制器通过冗余智驾功能控制整车靠边停车,避免整车失控,提高了车辆安全性。
30、结合第一方面,在第一方面的某些实现方式中,电机控制器还用于在根据智驾扭矩信号控制驱动电机输出扭矩的过程中,当智驾控制器失效且用户未操作油门踏板的开度、制动踏板的开度或者方向盘的转角,控制电动汽车的车身信号灯发出警示信号。
31、在电动汽车以智驾模式行驶的过程中,当智驾控制器因各种失效宕机、降级或退出控制时,智驾控制器会停止工作,导致无法继续进行智驾模式下的控制,此时需要驾驶员快速接管,而驾驶员接管通常需要秒级别的时间,在驾驶员接管之前,电动汽车可能处于不可控的状态,影响驾驶安全。电机控制器进入冗余智驾模式,电机控制器可以控制车身信号灯发出警示信号,从而提醒该电动汽车已经入非正常状态。
32、在一些可能的实施例中,电机控制器可以接入电动汽车的车身控制器局域网总线can或高速容错网络协议flexray等通信线路,并通过总线向车身信号灯发送指令。
33、在另一些可能的实施例中,电机控制器可以先将警示指令发送给整车控制器,再由整车控制器通过总线转发至车身信号灯。
34、根据本技术的方案,在智驾控制器失效宕机后,在人驾接管前,由电机控制器实现冗余智驾功能控制整车继续运行,同时通过车身信号灯发出警示信息提醒其他车辆,降低行车风险,提高了车辆安全性。
35、结合第一方面,在第一方面的某些实现方式中,电机控制器还用于在控制电动汽车的车身信号灯发出警示信号过程中,响应于智驾扭矩信号或用户操作的油门踏板的开度、制动踏板的开度或者方向盘的转角发生变化,控制电动汽车的车身信号灯停止发出警示信号。
36、当电动汽车在冗余智驾模式下行驶过程中,如果智驾控制器恢复运行或者人驾进行接管,那么电动汽车会从冗余智驾模式切换到智驾模式或人驾模式,电机控制器控制消除车身信号灯,电动汽车已经恢复正常状态或由驾驶员接管,无需再进行警示。
37、根据本技术的方案,在智驾控制器失效宕机后,在人驾接管前,由电机控制器实现冗余智驾功能控制整车继续运行,同时通过车身信号灯发出警示信息提醒其他车辆,当智驾控制器恢复或人驾接管后,消除车身信号灯,降低了行车风险,提高了车辆安全性。
38、结合第一方面,在第一方面的某些实现方式中,电机控制器还用于在根据感知数据信号控制驱动电机输出扭矩的过程中,响应于智驾扭矩信号,按预设变化率控制驱动电机输出的扭矩变化至智驾扭矩信号指示的扭矩。
39、电机控制器从冗余智驾模式切换到智驾模式时,控制驱动电机的扭矩输出平滑过渡到智驾扭矩信号指示的扭矩。预设变化率可以是根据整车标定的。
40、根据本技术的方案,在智驾控制器失效宕机后,在人驾接管前,由电机控制器实现冗余智驾功能控制整车继续运行,当智驾控制器恢复后接管,电机控制器控制驱动电机输出的扭矩平滑切换到智驾控制系统指令,避免了不同模式间切换的顿挫感,提高了电动汽车行驶过程中的舒适性。
41、结合第一方面,在第一方面的某些实现方式中,电机控制器用于在根据感知数据信号控制驱动电机输出扭矩的过程中,当用户操作的油门踏板的开度、制动踏板的开度或者方向盘的转角发生变化,按预设变化率控制驱动电机输出的扭矩从根据感知数据信号调整输出的扭矩变化至人驾扭矩信号所指示的扭矩。
42、电机控制器从冗余智驾模式切换到人驾模式时,控制驱动电机的扭矩输出平滑过渡到人驾扭矩信号指示的扭矩。预设变化率可以是根据整车标定的。
43、根据本技术的方案,在智驾控制器失效宕机后,在人驾接管前,由电机控制器实现冗余智驾功能控制整车继续运行,当人驾及时接管,电机控制器控制驱动电机输出的扭矩平滑切换到驾驶员的控制,避免了不同模式间切换的顿挫感,提高了电动汽车行驶过程中的舒适性。
44、结合第一方面,在第一方面的某些实现方式中,电机控制器还用于在控制转向系统使电动汽车向行驶方向的一侧靠近并控制驱动电机降低输出扭矩以使电动汽车停车的过程中,响应于用户操作的油门踏板的开度、制动踏板的开度或者方向盘的转角发生变化,控制驱动电机输出人驾扭矩信号所指示的扭矩值。
45、当电机控制器处于冗余智驾模式下,根据感知数据信号控制驱动电机调整扭矩输出,如果驾驶员长时间未介入控制,在预设时长内用户操作的油门踏板开度、制动踏板开度或方向盘的转角均为发生变化,电机控制器可以在冗余智驾功能下生成一条靠边停车的路径,并根据生成的路径控制驱动电机输出的扭矩和转向系统完成靠边停车的过程。在电机控制器控制电动汽车靠边停车的过程中,当驾驶员介入控制,优先以人驾指令进行控制,终止靠边停车的路径指示。
46、根据本技术的方案,在电机控制器通过冗余智驾功能靠边停车的过程中,当人驾介入,优先执行人驾指令控制电动汽车,提高了车辆的安全性。
47、结合第一方面,在第一方面的某些实现方式中,电机控制器用于在根据感知数据信号控制电动汽车的转向系统调整电动汽车的行驶方向的过程中,当用户操作的油门踏板的开度、制动踏板的开度或者方向盘的转角发生变化,停止控制电动汽车的转向系统调整电动汽车的行驶方向。
48、当电机控制器处于冗余智驾模式,由电机控制器接收电动汽车的感知系统指示的感知数据信号,并由电机控制器根据感知数据信号获取电动汽车的行驶状态和车道信息,通过解析距离、速度、加速度等信号,得到目标转向角或转向助力转矩等,基于融合后的信息做出驾驶决策/规划,并控制转向系统调整电动汽车的行驶方向。当人驾介入控制后,转向系统重新响应人驾的指令控制电动汽车的行驶方向。
49、应理解地,当电动汽车处于智驾模式或冗余智驾模式中,方向盘会随智驾控制器或电机控制器确定的转向角度进行转动,因此方向盘的转角在智驾模式或冗余智驾模式下会发生改变,而人驾指令需要用户对方向盘进行操作。本技术中用户操作的方向盘的转角发生变化指的是由驾驶员控制方向盘转动发生的转角变化,而不是方向盘自动进行转动时转角发生变化。电动汽车可以根据传感器检测方向盘上收到的力矩从而检测方向盘的转角变化是否由用户操作引起,电动汽车也可以通过其他方式进行检测,本技术对此不作限定。
50、根据本技术的方案,在电机控制器通过冗余智驾功能控制电动汽车行驶方向的过程中,当人驾介入,优先执行人驾指令控制电动汽车,提高了车辆的安全性。
51、第二方面,本技术提供了一种具有冗余智驾功能的电动汽车的控制方法,该控制方法包括在第一时刻,响应于人驾扭矩信号,控制电动汽车的驱动电机输出人驾扭矩信号所指示的扭矩值,人驾扭矩信号所指示的扭矩值随用户操作的电动汽车的油门踏板的开度的变化而变化。在第一时刻之后的第二时刻,响应于人驾扭矩信号切换为智驾扭矩信号,控制驱动电机输出智驾扭矩信号所指示的扭矩值,智驾扭矩信号所指示的扭矩值由电动汽车的智驾控制器根据电动汽车的感知系统指示的感知数据信号进行调整。在第二时刻之后的第三时刻,当停止接收智驾扭矩信号且用户未操作油门踏板的开度、制动踏板的开度或者方向盘的转角,根据感知数据信号控制驱动电机调整扭矩输出。
52、结合第二方面,在第二方面的某些实现方式中,控制方法还包括在第三时刻之后的第四时刻,当用户操作油门踏板的开度、制动踏板的开度或者方向盘的转角发生变化,停止根据感知数据信号控制驱动电机调整扭矩输出并控制电动汽车的驱动电机输出人驾扭矩信号所指示的扭矩值。
53、结合第二方面,在第二方面的某些实现方式中,控制方法还包括在第三时刻之后,响应于根据电动汽车的感知系统指示的感知数据信号控制驱动电机调整扭矩输出的持续预设时长,控制转向系统使电动汽车向行驶方向的一侧靠近并控制驱动电机降低输出扭矩以使电动汽车停车。
54、结合第二方面,在第二方面的某些实现方式中,控制方法还包括在第三时刻至第四时刻,控制电动汽车的车身信号灯发出警示信号。在第四时刻,控制电动汽车的车身信号灯停止发出警示信号。
55、第三方面,本技术提供了一种电动汽车,电动汽车包括整车控制器、智驾控制器和如第一方面及其各种实现方式中所述的电机控制器,智驾控制器用于根据电动汽车的感知系统指示的感知数据信号向电机控制器发送智驾扭矩信号。整车控制器用于当智驾控制器失效,向电机控制器发送智驾失效信号,智驾失效信号用于指示智驾控制器失效。
56、其它方面的有益效果可以参考第一方面描述的有益效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!