一种基于AI的陆空两用微型机器人及其控制系统的制作方法
本发明涉及机器人,具体涉及一种基于ai的陆空两用微型机器人及其控制系统。
背景技术:
1、ai的陆空两用微型机器人结合了地面行驶与空中飞行的能力,并融入了人工智能技术,应用场景广泛。
2、随着微型机器人技术的快速发展,对于能够在不同环境中灵活移动的机器人需求日益增长。现有的微型机器人为了保证移动能力,需要进行轻量化、简洁化的设计要求,控制系统与结构部件不能过于复杂,往往只具备单一的移动方式,如仅能行走或仅能飞行,这限制了它们在复杂环境中的应用能力。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于ai的陆空两用微型机器人及其控制系统,通过双向电机的正反向转动控制绳体的收卷或放出,从而控制飞行翅的展开或折叠,保护飞行翅,便于微型机器人在飞行模式和路行模式间转换。
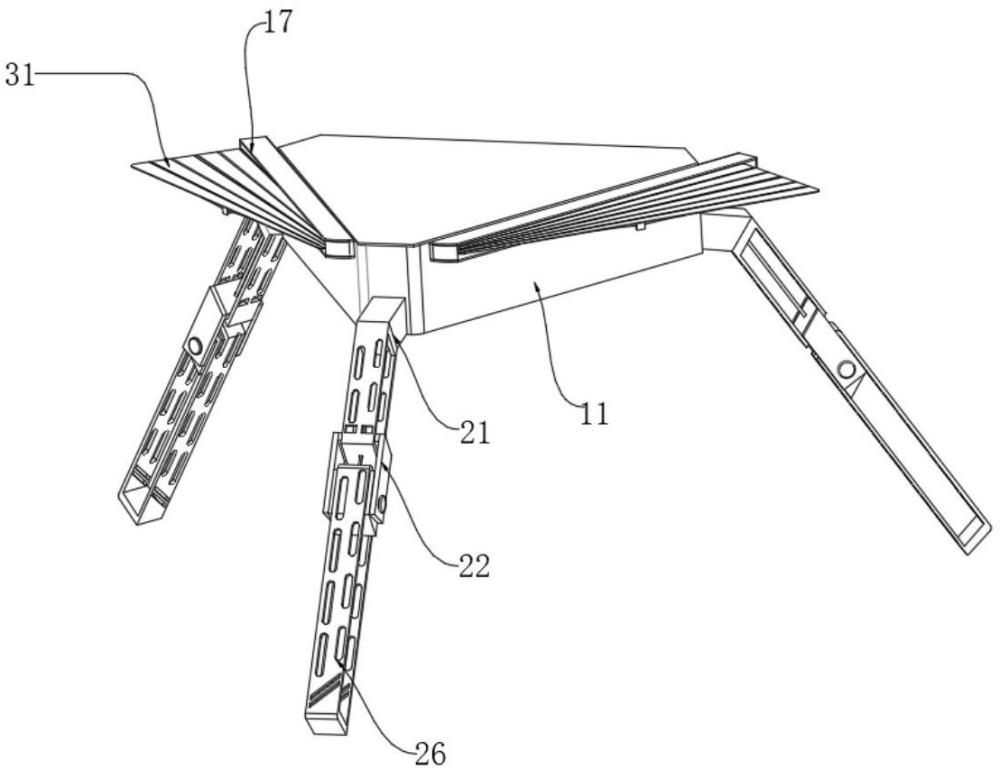
2、技术方案:为实现以上目的,本发明通过以下技术方案予以实现:一种基于ai的陆空两用微型机器人及其控制系统,包括:盒身,盒身由三块第一侧板与三块第二侧板首位顺次连接而成。
3、行走件,用于控制微型机器人于地面行走,行走件共三个,每个所述行走件的顶端均与一块第一侧板的外侧连接。
4、飞行件,用于控制微型机器人于空中飞行,所述飞行件共两个,两个所述飞行件对称分布在盒身纵向轴线的两侧。
5、控制件,用于为行走件、飞行件提供动力并控制行走件、飞行件的运动,所述控制件放置在盒身内部。
6、收放件,用于控制飞行件的伸展和折叠,所述收放件放置在盒身内部的中心处。
7、优选地,每块所述第一侧板均设置在两块第二侧板之间,所述第一侧板的两侧分别与两块第二侧板相靠近的一侧连接,所述盒身为六面体,所述第一侧板与第二侧板的高度相同,所述第一侧板的长度大于第二侧板的长度,所述盒身的俯视图形似正三角形,所述盒身的两端均设置有一块盖板,两块所述盖板相靠近的一侧分别与盒体的两端连接,两块所述第一侧板对称分布在盒身纵向轴线的两侧,两块所述第一侧板为一组对应板,每块对应板的外侧均贯穿开设有窗口、第二孔道,每块所述对应板侧面的上部均连接有一个放置盒,所述放置盒与窗口相连通,所述放置盒与第二孔道相连通,所述放置盒用于收纳折叠后的行走件,所述第二侧板侧面贯穿开设有第一孔道。
8、优选地,所述行走件包括:上腿,所述上腿的顶端与第二侧板的侧面连接,所述上腿的底端连接有连接板,所述连接板内侧设置有驱动器,所述驱动器两侧的中部均连接有杆体,所述杆体的一端穿过连接板并与边板连接,所述杆体与连接板转动连接,所述驱动器连接有下腿,所述驱动器用于驱动下腿,所述驱动器的顶端电性连接有第一导线和第二导线。
9、优选地,每个所述飞行件与一个放置盒相适配,所述飞行件包括:折翅,所述折翅共若干个,所述折翅设置在一块第一侧板的外侧,所述折翅远离第一侧板的一侧连接有骨条,所述骨条共若干条,每条所述骨条均设置在两条折翅之间,每条所述骨条的两侧分别与两条折翅相靠近的一侧连接,所述骨条用于加固折翅,所述折翅以骨条为轴进行折叠或伸展,远离所述第一侧板的一条折翅为外翅,外翅远离上腿一侧的边缘处连接有第一竖板,靠近第一侧板的一条折翅为里翅,里翅靠近所述上腿一侧的边缘处连接有第二竖板,所述第一竖板通过弹簧与第二竖板连接,所述第一竖板的中心处连接有绳体,所述绳体的一端依次穿过第二竖板、第二孔道,里翅靠近所述第一侧板的一侧通过连接条连接有翅板,所述翅板的一端穿过窗口并伸入盒身中,所述第一竖板的两侧均设置有加固条,所述加固条与第一竖板一体成型,所述加固条远离上腿的一侧与外翅靠近上腿的一侧连接。
10、优选地,所述控制件包括:电池组,所述电池组与盒身底部的盖板连接,所述盒身内设置有控制器,所述电池组的投影图与控制器的投影图均为半圆环形,所述电池组与控制器按盒身的纵向轴线对称分布,所述盒身靠近翅板的一端设置有振动器,所述翅板的一端穿过窗口并与振动器的振动部连接,所述振动器通过第三导线与电池组电性连接,所述振动器通过第四导线与控制器电性连接。
11、优选地,所述第一导线的顶端依次穿过连接板、上腿、并与电池组电性连接,所述第一导线与第二导线固定连接,所述第一导线的轴线与第二导线的轴线平行设置,所述第二导线的顶端与控制器电性连接。
12、优选地,所述收放件包括:双向电机,所述双向电机的底部与盒身底部的盖板连接,所述双向电机的转动部连接有收卷轴,所述收卷轴的侧面设置有若干条摩擦槽,所述收卷轴的顶部连接有顶板,所述收卷轴的侧面连接有隔板,所述隔板将收卷轴分为上区与下区,所述隔板位于上区的侧面连接有一条绳体,所述隔板位于下区的侧面连接有另一条绳体,当所述双向电机正向转动时,两根所述绳体均收卷,当所述双向电机反向转动时,两根所述绳体均放出,所述绳体放出后,所述绳体不阻碍飞行件的移动,所述盒身底部的盖板连接有立杆,所述绳体与立杆绕接。
13、优选地,一种控制系统,其特征在于,用于控制权利要求1-7任一项所述的基于ai的陆空两用微型机器人,包括:感知模块,采集模块包括视觉传感器、距离传感器、环境传感器中的至少任一种,感知模块用于实时感知周围环境;转换模块,用于在行走模式和飞行模式之间切换;ai控制模块,用于实时分析环境信息并控制机器人的移动和任务执行,ai控制模块包括至少一个ai算法,用于环境感知、路径规划和任务执行;能源管理模块,用于支持机器人在不同模式下的能源需求,能源管理模块包括能量存储单元和能量分配单元,用于优化机器人在不同模式下的能源使用。
14、有益效果:本发明提供了一种基于ai的陆空两用微型机器人及其控制系统。与现有技术相比,具备以下有益效果:1、盒体近似为三棱柱,盒体的三角处设置有行走件,通过行走件控制微型机器人于地面行走,盒体的两侧设置有一组飞行件,用于控制微型机器人于空中飞行,飞行件由众多的折翅和骨条组成,折翅可沿着骨条进行折叠,通过双向电机的正反向转动控制绳体的收卷和放出,绳体收卷,绳体拉动飞行件并折叠收放到放置盒中,保护飞行件,减少飞行件与障碍物接触面积,减少阻力,微型机器人转变为行走模式;绳体放出,飞行件不再受到绳体的牵引,飞行件在弹性件的作用下恢复并展开,微型机器人转变为飞行模式。
15、2、收卷轴的侧面连接有隔板,隔板将收卷轴所在区域分为上区和下区两个部分,可防止两根绳体发生接触和缠绕,收卷轴同时对两根绳体进行收卷,绳体通过拉动第一竖板拉动整个飞行翅,不同的折翅互相靠近并收叠在一起,弹簧压缩,远离盒身的飞行翅一端不断进入放置盒,最终所有的折翅折叠在一起并全部移入放置盒中,飞行翅收起,避免飞行翅与外界障碍接触,降低飞行翅被外物损坏的可能性。
16、3、移动时,可依据使用环境选择一条下腿或两条下腿作为主动力腿。当以一条下腿作为主动力腿时,两条辅动力腿跟随向前挪动,微型机器人在移动时较为稳定,适合狭窄环境或复杂地形;也可以两条下腿作为主动力腿,微型机器人移动速度快,适合在平稳地形中使用,可依据使用环境选择合适的移动方式。
17、4、当缠绕在收卷轴上的绳体完全放出后,双向电机停止转动,飞行翅完全展开,此时绳体整体呈现松弛状态,振动器的振动部带着两个飞行翅高速振动并带着微型机器人飞行,当飞行翅移动到最高点或最低点时,绳体依旧松弛,绳体不会阻碍飞行翅的振动。
- 还没有人留言评论。精彩留言会获得点赞!