隧道驾驶行为预测方法、装置、设备及存储介质
本发明属于隧道行车安全,尤其涉及一种隧道驾驶行为预测方法、装置、设备及存储介质。
背景技术:
1、高速公路螺旋隧道在设计时采用小半径的圆曲线设计,以螺旋展线的方式克服山区线路爬升的难题,以长度换取高度,同时具有隧道内部空间密闭、距离较长、连续纵坡、视距有限、制动单一等特点。螺旋隧道在极大提高了交通可达性和连通性的同时,其驾驶环境的复杂性也造成了更多的不可控因素和交通安全风险。因此,准确预测驾驶员在隧道路段行车的驾驶行为变化情况,对于隧道行车安全和隧道运营管理具有十分重要的意义。
技术实现思路
1、有鉴于此,本发明实施例提供了一种隧道驾驶行为预测方法、装置、设备及存储介质,以准确预测驾驶员在隧道路段行车的驾驶行为变化情况。
2、本发明实施例的第一方面提供了一种隧道驾驶行为预测方法,包括:
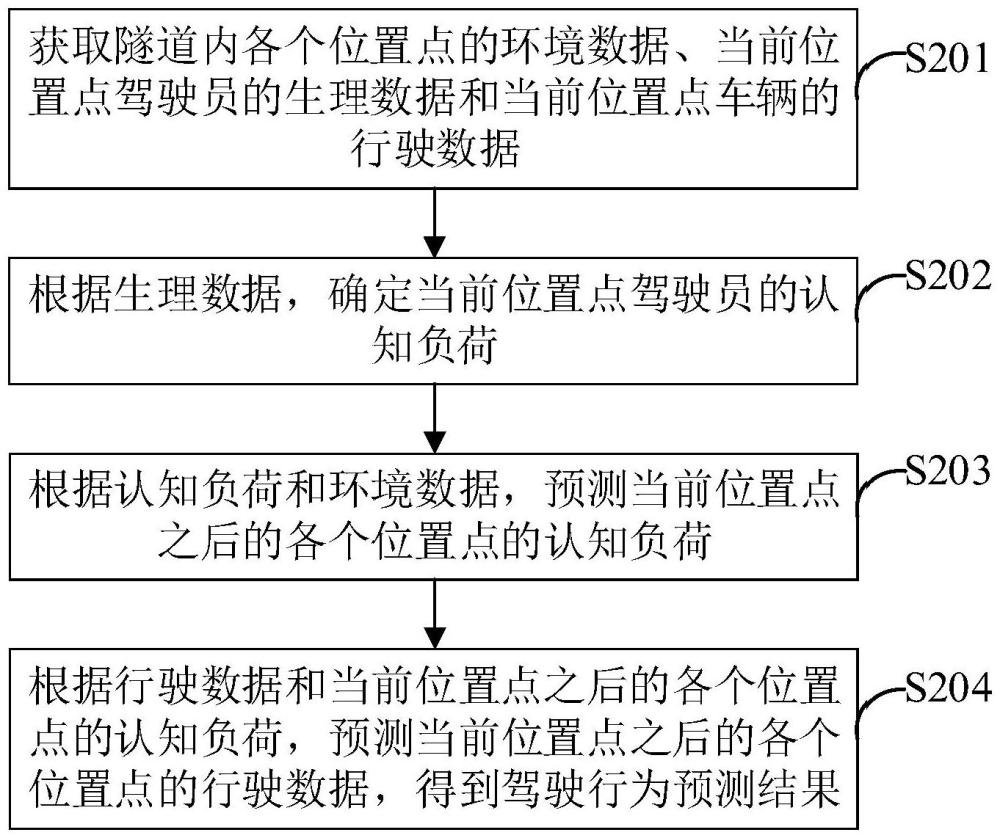
3、获取隧道内各个位置点的环境数据、当前位置点驾驶员的生理数据和当前位置点车辆的行驶数据;
4、根据所述生理数据,确定当前位置点驾驶员的认知负荷;
5、根据所述认知负荷和所述环境数据,预测当前位置点之后的各个位置点的认知负荷;
6、根据所述行驶数据和当前位置点之后的各个位置点的认知负荷,预测当前位置点之后的各个位置点的行驶数据,得到驾驶行为预测结果。
7、结合第一方面,在第一方面的一种可能的实现方式中,所述生理数据包括:多种心理因子数据和多种视觉因子数据;
8、所述根据所述生理数据,确定当前位置点驾驶员的认知负荷,包括:
9、根据各种心理因子数据,确定心理量化值;
10、根据各种视觉因子数据,确定视觉量化值;
11、根据预设的心理因子和视觉因子的权重值,对所述心理量化值和所述视觉量化值进行加权融合,得到所述认知负荷。
12、结合第一方面,在第一方面的一种可能的实现方式中,所述环境数据包括:多种环境因子数据;
13、所述根据所述认知负荷和所述环境数据,预测当前位置点之后的各个位置点的认知负荷,包括:
14、根据所述认知负荷和当前位置点之后的各个位置点的任一种环境因子数据,通过预设的该种环境因子的时间序列模型,预测该种环境因子对应的当前位置点之后的各个位置点的认知负荷;其中,该种环境因子的时间序列模型用于根据每个位置点的认知负荷和下一位置点的该种环境因子数据,预测下一位置点的认知负荷;
15、基于当前位置点之后的每个位置点的各种环境因子对应的认知负荷,确定当前位置点之后的每个位置点的认知负荷。
16、结合第一方面,在第一方面的一种可能的实现方式中,所述行驶数据包括:多种行驶参数数据;
17、所述根据所述行驶数据和当前位置点之后的各个位置点的认知负荷,预测当前位置点之后的各个位置点的行驶数据,包括:
18、根据所述行驶数据中的任一种行驶参数数据和当前位置点之后的各个位置点的认知负荷,通过预设的该种行驶参数的时间序列模型,预测当前位置点之后的各个位置点的该种行驶参数数据;
19、其中,该种行驶参数的时间序列模型用于根据每个位置点的该种行驶参数数据和下一位置点的认知负荷,预测下一位置点的该种行驶参数数据。
20、结合第一方面,在第一方面的一种可能的实现方式中,所述环境数据包括多种环境因子数据,所述行驶数据包括多种行驶参数数据;
21、在所述得到驾驶行为预测结果之后,所述方法还包括:
22、获取各种环境因子对各种行驶参数的影响关系;
23、根据当前位置点之后的各个位置点的多种行驶参数数据,以及各种环境因子对各种行驶参数的影响关系,确定至少一种环境因子的调整量;
24、基于所述至少一种环境因子的调整量,调整对应的环境因子。
25、结合第一方面,在第一方面的一种可能的实现方式中,所述获取各种环境因子对各种行驶参数的影响关系,包括:
26、获取不同环境数据下的行驶数据;
27、根据所述不同环境数据下的行驶数据,构建以各种环境因子为输入变量,以任一种行驶参数为输出变量的lstm预测模型;
28、通过梯度解释器训练所述lstm预测模型的shap值;
29、根据所述shap值确定各种环境因子对该种行驶参数的影响关系。
30、结合第一方面,在第一方面的一种可能的实现方式中,所述的多种环境因子数据包括:至少一种道路条件因子数据、至少一种照明环境因子数据和至少一种交通流因子数据;
31、所述的多种行驶参数数据包括:行驶速度数据、加速度数据、侧向加速度数据和横向偏移量数据。
32、本发明实施例的第二方面提供了一种隧道驾驶行为预测装置,包括:
33、获取模块,用于获取隧道内各个位置点的环境数据、当前位置点驾驶员的生理数据和当前位置点车辆的行驶数据;
34、第一处理模块,用于根据所述生理数据,确定当前位置点驾驶员的认知负荷;
35、第二处理模块,用于根据所述认知负荷和所述环境数据,预测当前位置点之后的各个位置点的认知负荷;
36、第三处理模块,用于根据所述行驶数据和当前位置点之后的各个位置点的认知负荷,预测当前位置点之后的各个位置点的行驶数据,得到驾驶行为预测结果。
37、结合第二方面,在第二方面的一种可能的实现方式中,所述生理数据包括:多种心理因子数据和多种视觉因子数据;
38、所述第一处理模块用于:
39、根据各种心理因子数据,确定心理量化值;
40、根据各种视觉因子数据,确定视觉量化值;
41、根据预设的心理因子和视觉因子的权重值,对所述心理量化值和所述视觉量化值进行加权融合,得到所述认知负荷。
42、结合第二方面,在第二方面的一种可能的实现方式中,所述环境数据包括:多种环境因子数据;
43、所述第二处理模块用于:
44、根据所述认知负荷和当前位置点之后的各个位置点的任一种环境因子数据,通过预设的该种环境因子的时间序列模型,预测该种环境因子对应的当前位置点之后的各个位置点的认知负荷;其中,该种环境因子的时间序列模型用于根据每个位置点的认知负荷和下一位置点的该种环境因子数据,预测下一位置点的认知负荷;
45、基于当前位置点之后的每个位置点的各种环境因子对应的认知负荷,确定当前位置点之后的每个位置点的认知负荷。
46、结合第二方面,在第二方面的一种可能的实现方式中,所述行驶数据包括:多种行驶参数数据;
47、所述第三处理模块用于:
48、根据所述行驶数据中的任一种行驶参数数据和当前位置点之后的各个位置点的认知负荷,通过预设的该种行驶参数的时间序列模型,预测当前位置点之后的各个位置点的该种行驶参数数据;
49、其中,该种行驶参数的时间序列模型用于根据每个位置点的该种行驶参数数据和下一位置点的认知负荷,预测下一位置点的该种行驶参数数据。
50、结合第二方面,在第二方面的一种可能的实现方式中,所述环境数据包括多种环境因子数据,所述行驶数据包括多种行驶参数数据;
51、在所述得到驾驶行为预测结果之后,所述第三处理模块还用于:
52、获取各种环境因子对各种行驶参数的影响关系;
53、根据当前位置点之后的各个位置点的多种行驶参数数据,以及各种环境因子对各种行驶参数的影响关系,确定至少一种环境因子的调整量;
54、基于所述至少一种环境因子的调整量,调整对应的环境因子。
55、结合第二方面,在第二方面的一种可能的实现方式中,所述第三处理模块用于:
56、获取不同环境数据下的行驶数据;
57、根据所述不同环境数据下的行驶数据,构建以各种环境因子为输入变量,以任一种行驶参数为输出变量的lstm预测模型;
58、通过梯度解释器训练所述lstm预测模型的shap值;
59、根据所述shap值确定各种环境因子对该种行驶参数的影响关系。
60、结合第二方面,在第二方面的一种可能的实现方式中,所述的多种环境因子数据包括:至少一种道路条件因子数据、至少一种照明环境因子数据和至少一种交通流因子数据;
61、所述的多种行驶参数数据包括:行驶速度数据、加速度数据、侧向加速度数据和横向偏移量数据。
62、本发明实施例的第三方面提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面或第一方面的任意一种实现方式中的方法的步骤。
63、本发明实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面或第一方面的任意一种实现方式中的方法的步骤。
64、本发明实施例与现有技术相比存在的有益效果是:
65、本发明实施例基于隧道内环境-人-车的驾驶行为反馈作用原理,通过获取隧道内各个位置点的环境数据、当前位置点驾驶员的生理数据和当前位置点车辆的行驶数据,根据生理数据确定当前位置点驾驶员的认知负荷,根据认知负荷和环境数据,预测当前位置点之后的各个位置点的认知负荷,根据行驶数据和当前位置点之后的各个位置点的认知负荷,预测当前位置点之后的各个位置点的行驶数据,得到驾驶行为预测结果。本发明实施例能够准确预测得到多维复杂因素下,隧道内每一位置的驾驶员认知负荷和车辆运行状态,为提高行车安全和增强隧道交通管理提供支持。
- 还没有人留言评论。精彩留言会获得点赞!