一种车辆换道请求校验方法、装置、设备及介质与流程
本发明涉及自动驾驶,特别涉及一种车辆换道请求校验方法、装置、设备及介质。
背景技术:
1、在高级驾驶辅助系统(advanced driver assistance systems,adas)中,车辆自主换道或者驾驶员拨杆换道时,需要对车辆周围障碍物信息进行安全校验,确保换道过程中车辆是安全的。其中,障碍物信息主要指出的是车辆、行人等障碍物的位置和速度信息。
2、当前,对障碍物进行安全校验的方法主要是通过计算自车与目标车道之间障碍物的碰撞时间(time to collision,即ttc)来衡量是否存在碰撞风险。然而,基于计算碰撞时间的算法存在以下几点问题:(1)当障碍物与自车速度比较接近时,使用ttc进行判断是不太准确的;(2)当障碍物在自车后方并且速度低于自车车速时,难以使用ttc来判断出风险;(3)ttc计算都是基于障碍物匀速的假设,但这与实际的应用情况并不一致;(4)ttc计算没有考虑自车与障碍物的交互情况,而实际情况下,两者交互是不可避免的。
3、综上,如何在车辆换道过程中考虑到自车换道轨迹与障碍物的交互,以更符合实际的车辆换道场景,提高换道安全性是目前有待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种车辆换道请求校验方法、装置、设备及介质,能够在车辆换道过程中考虑到自车换道轨迹与障碍物的交互,以更符合实际的车辆换道场景,提高换道安全性。其具体方案如下:
2、第一方面,本技术公开了一种车辆换道请求校验方法,包括:
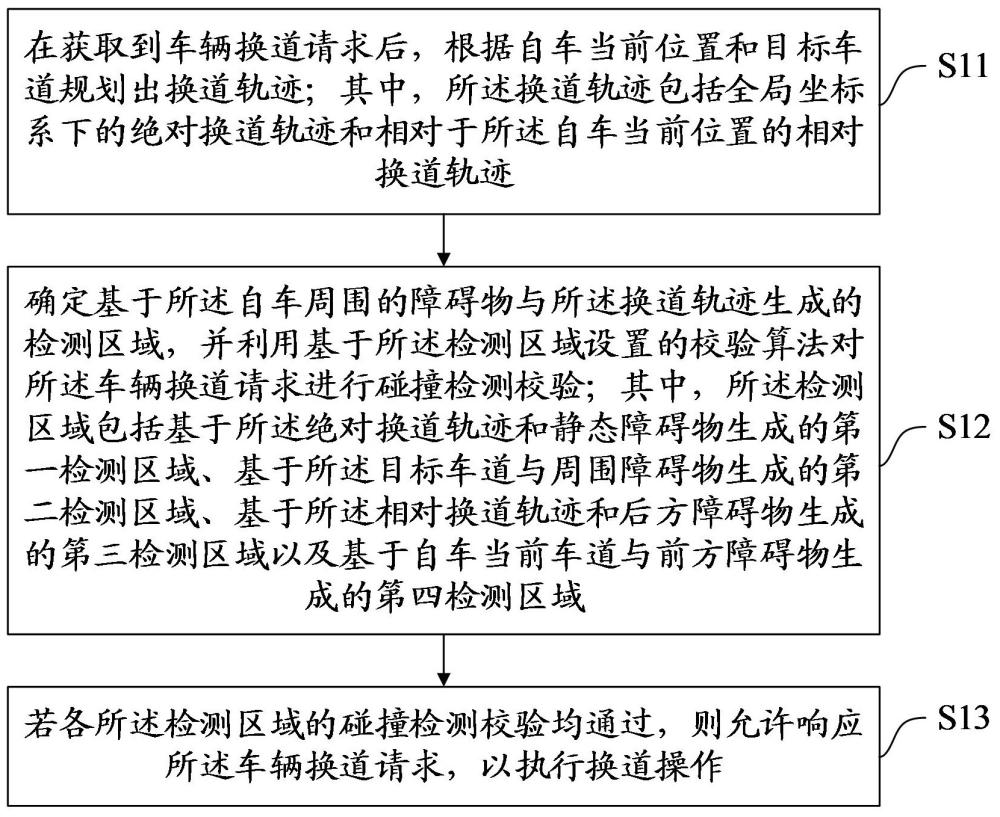
3、在获取到车辆换道请求后,根据自车当前位置和目标车道规划出换道轨迹;其中,所述换道轨迹包括全局坐标系下的绝对换道轨迹和相对于所述自车当前位置的相对换道轨迹;
4、确定基于所述自车周围的障碍物与所述换道轨迹生成的检测区域,并利用基于所述检测区域设置的校验算法对所述车辆换道请求进行碰撞检测校验;其中,所述检测区域包括基于所述绝对换道轨迹和静态障碍物生成的第一检测区域,基于所述目标车道与周围障碍物生成的第二检测区域、基于所述相对换道轨迹和后方障碍物生成的第三检测区域以及基于自车当前车道与前方障碍物生成的第四检测区域;
5、若各所述检测区域的碰撞检测校验均通过,则允许响应所述车辆换道请求,以执行换道操作。
6、可选的,利用基于所述第一检测区域设置的校验算法对所述车辆换道请求进行碰撞检测校验,包括:
7、根据第一预设采样间隔对所述绝对换道轨迹进行采样得到若干数量个采样点,并在每个采样点处根据第一预设长宽信息生成第一车辆轮廓,以基于各所述第一车辆轮廓对应的边界框生成第一换道轨迹轮廓;
8、根据所述第一换道轨迹轮廓与静态障碍物之间的位置关系确定是否存在碰撞,若不存在碰撞,则判定所述第一检测区域的碰撞检测校验通过。
9、可选的,所述根据所述第一换道轨迹轮廓与静态障碍物之间的位置关系确定是否存在碰撞,包括:
10、若存在碰撞,则确定所述第一换道轨迹轮廓中与所述静态障碍物发生碰撞的目标车辆轮廓,并计算所述目标车辆轮廓中对应的车辆后轴中心与所述目标车道的车道中心线之间的距离值;
11、判断所述距离值是否小于第一预设距离阈值;
12、若所述距离值小于所述第一预设距离阈值,则忽略相应的静态障碍物,并判定所述第一检测区域的碰撞检测校验通过,否则判定所述第一检测区域的碰撞检测校验不通过。
13、可选的,利用基于所述第二检测区域设置的校验算法对所述车辆换道请求进行碰撞检测校验,包括:
14、基于所述目标车道相对于自车当前位置的前方第一预设区域和后方第二预设区域构建目标位置区域;
15、判断周围障碍物是否存在于所述目标位置区域内,若是,则判定所述第二检测区域的碰撞检测校验不通过,否则判定所述第二检测区域的碰撞检测校验通过。
16、可选的,利用基于所述第三检测区域设置的校验算法对所述车辆换道请求进行碰撞检测校验,包括:
17、根据第二预设采样间隔对所述相对换道轨迹进行采样得到若干数量个采样点,并在每个采样点处根据第二预设长宽信息生成第二车辆轮廓,以基于各所述第二车辆轮廓对应的边界框生成第二换道轨迹轮廓;
18、确定所述目标车道中位于换道轨迹终点后方的首个第一目标障碍物;
19、基于所述换道轨迹终点和所述第一目标障碍物的中心点构建第一障碍物轮廓,并根据所述第一障碍物轮廓与所述第二换道轨迹轮廓之间的位置关系确定首个碰撞点;
20、计算所述第一目标障碍物与所述首个碰撞点之间的纵向距离,并基于所述纵向距离、自车当前车速、所述第一目标障碍物的车速、所述第一目标障碍物的驾驶反应时间、目标相对安全距离以及所述第一目标障碍物降速过程中相对于自车所行驶的目标距离计算所述第一目标障碍物与所述相对换道轨迹之间的剩余距离值;
21、判断所述剩余距离值是否大于第二预设距离阈值,若是,则判定所述第三检测区域的碰撞检测校验通过,否则判定所述第三检测区域的碰撞检测校验不通过。
22、可选的,所述基于所述纵向距离、自车当前车速、所述第一目标障碍物的车速、所述第一目标障碍物的驾驶反应时间、目标相对安全距离以及所述第一目标障碍物降速过程中相对于自车所行驶的目标距离计算所述第一目标障碍物与所述相对换道轨迹之间的剩余距离值,包括:
23、基于自车当前车速和所述第一目标障碍物的车速确定在所述第一目标障碍物的驾驶反应时间内,所述第一目标障碍物相对于自车所行驶的相对距离,并确定与所述自车当前车速匹配的目标相对安全距离;
24、确定自车当前位置与所述目标车道的车道中心线之间的横向距离,并确定与所述横向距离匹配的减速度,以利用所述减速度确定所述第一目标障碍物在减速至所述自车当前车速时需要行驶的第一距离和时间值;
25、基于所述时间值和所述自车当前车速计算所述自车行驶的第二距离,并利用所述第一距离和所述第二距离计算所述第一目标障碍物降速过程中相对于自车所行驶的目标距离;
26、将所述纵向距离与所述相对距离、所述目标相对安全距离和所述目标距离的差值确定为所述第一目标障碍物与所述相对换道轨迹之间的剩余距离值。
27、可选的,利用基于所述第四检测区域设置的校验算法对所述车辆换道请求进行碰撞检测校验,包括:
28、确定自车当前车道前方的首个第二目标障碍物;
29、以所述第二目标障碍物的中心点为原点,并基于与第二目标障碍物的车速对应的安全距离构建第二障碍物轮廓;
30、根据所述第二换道轨迹轮廓与第二障碍物轮廓之间的位置关系确定是否存在碰撞,若不存在碰撞,则判定所述第四检测区域的碰撞检测校验通过,否则判定所述第四检测区域的碰撞检测校验不通过。
31、第二方面,本技术公开了一种车辆换道请求校验装置,包括:
32、轨迹规划模块,用于在获取到车辆换道请求后,根据自车当前位置和目标车道规划出换道轨迹;其中,所述换道轨迹包括全局坐标系下的绝对换道轨迹和相对于所述自车当前位置的相对换道轨迹;
33、碰撞检测模块,用于确定基于所述自车周围的障碍物与所述换道轨迹生成的检测区域,并利用基于所述检测区域设置的校验算法对所述车辆换道请求进行碰撞检测校验;其中,所述检测区域包括基于所述绝对换道轨迹和静态障碍物生成的第一检测区域,基于所述目标车道与周围障碍物生成的第二检测区域、基于所述相对换道轨迹和后方障碍物生成的第三检测区域以及基于自车当前车道与前方障碍物生成的第四检测区域;
34、换道模块,用于若各所述检测区域的碰撞检测校验均通过,则允许响应所述车辆换道请求,以执行换道操作。
35、第三方面,本技术公开了一种电子设备,包括:
36、存储器,用于保存计算机程序;
37、处理器,用于执行所述计算机程序,以实现前述公开的车辆换道请求校验方法的步骤。
38、第四方面,本技术公开了一种计算机可读存储介质,用于存储计算机程序;其中,所述计算机程序被处理器执行时实现前述公开的车辆换道请求校验方法的步骤。
39、可见,本技术在获取到车辆换道请求后,根据自车当前位置和目标车道规划出换道轨迹;其中,所述换道轨迹包括全局坐标系下的绝对换道轨迹和相对于所述自车当前位置的相对换道轨迹;确定基于所述自车周围的障碍物与所述换道轨迹生成的检测区域,并利用基于所述检测区域设置的校验算法对所述车辆换道请求进行碰撞检测校验;其中,所述检测区域包括基于所述绝对换道轨迹和静态障碍物生成的第一检测区域、基于所述目标车道与周围障碍物生成的第二检测区域、基于所述相对换道轨迹和后方障碍物生成的第三检测区域以及基于自车当前车道与前方障碍物生成的第四检测区域;若各所述检测区域的碰撞检测校验均通过,则允许响应所述车辆换道请求,以执行换道操作。
40、有益效果:本技术在获取到车辆换道请求后,首先根据自车当前位置和目标车道规划出换道轨迹,换道轨迹除了包括全局坐标系下的绝对换道轨迹以外,还包括相对于自车当前位置的相对换道轨迹。进一步的,本技术需要基于自车周围的障碍物与换道轨迹生成检测区域,以利用基于检测区域设置的校验算法对车辆换道请求进行碰撞检测校验,从而在车辆换道过程中考虑到自车换道轨迹与障碍物的交互,以更符合实际的车辆换道场景。上述检测区域主要包括有四种类型,分别是基于绝对换道轨迹和静态障碍物生成的第一检测区域、基于目标车道与周围障碍物生成的第二检测区域、基于相对换道轨迹和后方障碍物生成的第三检测区域以及基于自车当前车道与前方障碍物生成的第四检测区域。也即,本技术分别将绝对换道轨迹、相对换道轨迹分别与障碍物构建不同的检测区域进行碰撞检测,以及将自车当前车道和目标车道也分别与障碍物构建不同的检测区域进行碰撞检测,最后只有在各检测区域的碰撞检测校验均通过的情况下,才允许响应车辆换道请求,以执行换道操作,如此一来,也提高了换道安全性。
- 还没有人留言评论。精彩留言会获得点赞!