巡航系统规划位置的偏差控制方法、装置、设备及存储介质与流程
本技术涉及自动驾驶,尤其涉及巡航系统规划位置的偏差控制方法、装置、设备及存储介质。
背景技术:
1、随着自动驾驶技术的发展,巡航系统在车辆行驶过程中扮演着越来越重要的角色。这些系统通过精确的位置规划来控制车辆的行驶路径,以提高行驶效率和安全性。然而,在实际应用中,由于多种因素的影响,如传感器误差、环境变化、车辆动态响应等,巡航系统规划的位置与车辆实际位置之间往往存在偏差。这种偏差如果过大,可能会导致车辆无法有效响应前方障碍物,增加碰撞风险,影响驾驶舒适性和安全性。
2、目前,一些巡航系统采用速度重规划的方法来应对规划路径与实际行驶路径之间的偏差。例如,公开号为cn114489073a的专利“自动驾驶速度重规划方法、装置、设备及可读存储介质”中提到,系统会根据规划速度及实际响应速度的误差来判断是否需要进入速度重规划。这种方法主要关注速度的调整,通过调整速度来减少速度规划与实际速度之间的误差。
3、尽管速度重规划方法在一定程度上可以减少速度误差,但它并未涉及距离重规划,也就是说,对于规划路径与实际路径之间的距离偏差问题,现有技术并没有提供有效的解决方案。此外,仅仅调整速度可能不足以解决所有情况下的偏差问题,特别是在遇到复杂路况或者车辆动态性能限制时,单纯的速度调整可能无法有效减少规划位置与实际位置之间的偏差。因此,如何减小巡航系统规划的位置与车辆实际位置的偏差成为亟待解决的问题。
4、上述内容仅用于辅助理解本技术的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本技术目的在于提供一种巡航系统规划位置的偏差控制方法、装置、设备及存储介质,旨在解决如何减小巡航系统规划的位置与车辆实际位置的偏差的技术问题。
2、为实现上述目的,本技术提出一种巡航系统规划位置的偏差控制方法,所述方法包括:
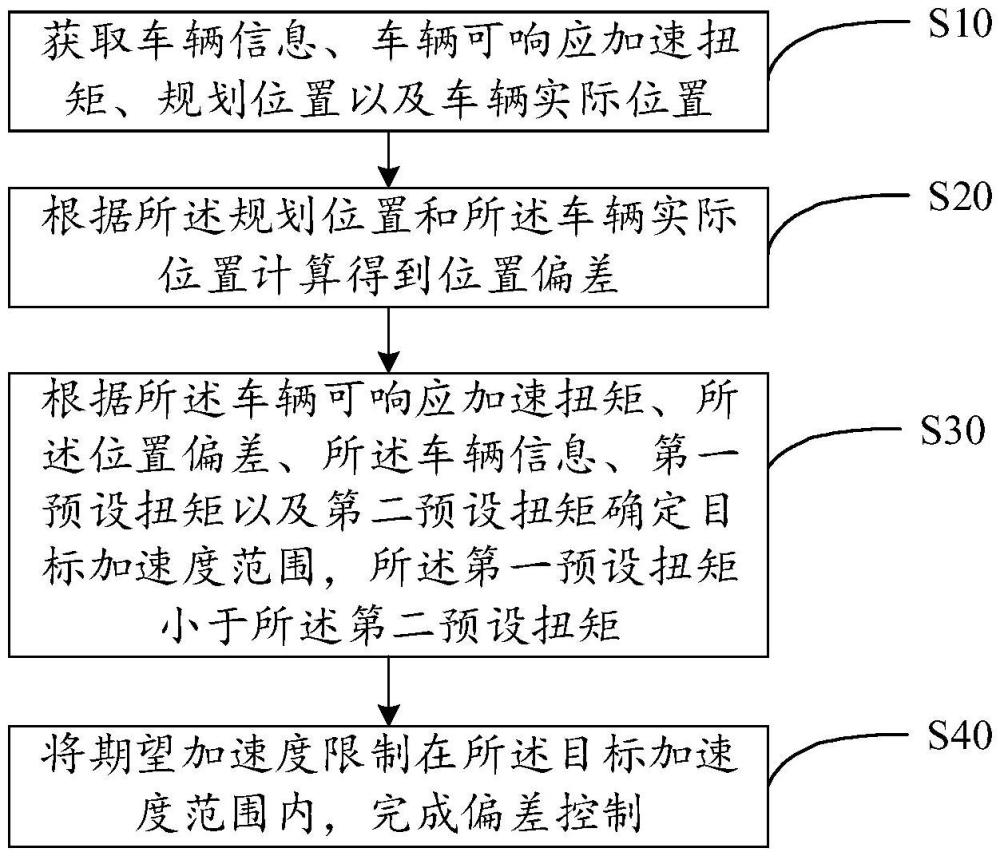
3、获取车辆信息、车辆可响应加速扭矩、规划位置以及车辆实际位置;
4、根据所述规划位置和所述车辆实际位置计算得到位置偏差;
5、根据所述车辆可响应加速扭矩、所述位置偏差、所述车辆信息、第一预设扭矩以及第二预设扭矩确定目标加速度范围,所述第一预设扭矩小于所述第二预设扭矩;
6、将期望加速度限制在所述目标加速度范围内,完成偏差控制。
7、在一实施例中,所述根据所述车辆可响应加速扭矩、所述位置偏差、所述车辆信息、第一预设扭矩以及第二预设扭矩确定目标加速度范围的步骤包括:
8、当所述车辆可响应加速扭矩小于第一预设扭矩的情况下,根据所述位置偏差确定目标加速度范围;
9、当所述车辆可响应加速扭矩大于所述第一预设扭矩且小于第二预设扭矩的情况下,根据所述车辆可响应加速扭矩和所述车辆信息计算得到所述目标加速度范围。
10、在一实施例中,所述车辆信息包括变速器传动比、主减速器传动比、传动系机械效率、车轮半径、车辆速度、车辆质量以及迎风面积,所述当所述车辆可响应加速扭矩大于所述第一预设扭矩且小于第二预设扭矩的情况下,根据所述车辆可响应加速扭矩和所述车辆信息计算得到所述目标加速度范围的步骤包括:
11、当所述车辆可响应加速扭矩大于所述第一预设扭矩且小于第二预设扭矩的情况下,根据所述车辆可响应加速扭矩、所述变速器传动比、所述主减速器传动比、所述传动系机械效率以及所述车轮半径计算得到驱动力;
12、根据预设空气阻力系数、所述迎风面积以及所述车辆速度计算得到空气阻力;
13、根据所述驱动力、所述空气阻力以及所述车辆质量计算得到加速度阈值;
14、根据预设加速度系数和所述加速度阈值计算得到目标加速度范围。
15、在一实施例中,所述根据所述位置偏差确定目标加速度范围的步骤包括:
16、当所述位置偏差大于第一预设距离的情况下,将第一预设加速度范围作为目标加速度范围;
17、当所述位置偏差大于第二预设距离的情况下,将第二预设加速度范围作为所述目标加速度范围,所述第二预设距离大于所述第一预设距离,所述第二预设加速度范围小于所述第一预设加速度范围;
18、当所述位置偏差大于第三预设距离的情况下,将第三预设加速度范围作为所述目标加速度范围,所述第三预设距离大于所述第二预设距离,所述第三预设加速度范围小于所述第二预设加速度范围。
19、在一实施例中,所述根据所述规划位置和所述车辆实际位置计算得到位置偏差的步骤之后,还包括:
20、当所述车辆可响应加速扭矩大于第二预设扭矩的情况下,获取当前车速和偏差时间;
21、当所述当前车速大于预设车速阈值且所述位置偏差大于第四预设距离且所述偏差时间大于预设时长的情况下,重新进行规划,并在规划完成后返回所述根据所述规划位置和所述车辆实际位置计算得到位置偏差的步骤;
22、当所述当前车速小于所述预设车速阈值且所述位置偏差大于第五预设距离且所述偏差时间大于所述预设时长的情况下,重新进行规划,并在规划完成后返回所述根据所述规划位置和所述车辆实际位置计算得到位置偏差的步骤,所述第五预设距离小于所述第四预设距离;
23、当所述偏差时间大于第二预设时长的情况下,进行报警并发出提示,所述第二预设时长大于所述第一预设时长。
24、在一实施例中,所述获取车辆可响应加速扭矩的步骤包括:
25、获取车辆剩余电量、电池电流、车辆速度、重力加速度以及滚动阻力系数;
26、根据所述车辆剩余电量和所述电池电流计算得到电池功率限制;
27、根据所述滚动阻力系数、所述车辆质量以及所述重力加速度计算得到滚动阻力;
28、根据所述电池功率限制、所述空气阻力、所述车辆速度以及所述滚动阻力计算得到加速所需功率;
29、根据所述车轮半径和所述车辆速度计算得到车轮角速度;
30、根据所述车轮角速度和所述加速所需功率计算得到车辆可响应加速扭矩。
31、在一实施例中,所述将所述期望加速度限制在所述目标加速度范围内的步骤之后,还包括:
32、获取当前规划位置和当前车辆实际位置;
33、根据所述当前规划位置和所述当前车辆实际位置计算得到当前位置偏差;
34、当所述当前位置偏差大于第六预设距离的情况下,进行报警并发出提示。
35、此外,为实现上述目的,本技术还提出一种巡航系统规划位置的偏差控制装置,所述装置包括:
36、数据获取模块,用于获取车辆信息、车辆可响应加速扭矩、规划位置以及车辆实际位置;
37、偏差计算模块,用于根据所述规划位置和所述车辆实际位置计算得到位置偏差;
38、范围确定模块,用于根据所述车辆可响应加速扭矩、所述位置偏差、所述车辆信息、第一预设扭矩以及第二预设扭矩确定目标加速度范围,所述第一预设扭矩小于所述第二预设扭矩;
39、限制模块,用于将期望加速度限制在所述目标加速度范围内,完成偏差控制。
40、此外,为实现上述目的,本技术还提出一种巡航系统规划位置的偏差控制设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如上文所述的巡航系统规划位置的偏差控制方法的步骤。
41、此外,为实现上述目的,本技术还提出一种存储介质,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上文所述的巡航系统规划位置的偏差控制方法的步骤。
42、此外,为实现上述目的,本技术还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现如上文所述的巡航系统规划位置的偏差控制方法的步骤。
43、本技术提出的一个或多个技术方案,至少具有以下技术效果:
44、获取车辆信息、车辆可响应加速扭矩、规划位置以及车辆实际位置;根据所述规划位置和所述车辆实际位置计算得到位置偏差;根据所述车辆可响应加速扭矩、所述位置偏差、所述车辆信息、第一预设扭矩以及第二预设扭矩确定目标加速度范围,所述第一预设扭矩小于所述第二预设扭矩;将期望加速度限制在所述目标加速度范围内,完成偏差控制。系统首先通过传感器和车辆控制单元收集关键的车辆信息,包括车辆可响应的加速扭矩、规划位置以及车辆实际位置。这些数据为系统提供了全面的车辆状态和位置数据,是评估车辆行驶状态和位置偏差的基础。接着,系统通过比较规划位置和实际位置,计算出车辆的实际行驶路径与预定路径之间的偏差距离,这一步骤能够量化车辆偏离预定轨迹的程度,为后续的控制决策提供关键信息。然后,系统根据车辆的可响应加速扭矩、位置偏差、车辆信息以及预设的扭矩阈值来确定一个目标加速度范围,这个范围是车辆在当前条件下安全行驶的加速度区间,通过设定目标加速度范围,系统能够根据车辆的实际动力能力和位置偏差来调整加速度,确保车辆在不同行驶条件下都能保持安全的行驶状态。最后,系统将计算出的期望加速度限制在之前确定的目标加速度范围内,如果期望加速度超出这个范围,系统会自动调整,以确保实际加速度保持在目标加速度范围内。这一系列步骤通过精确控制车辆的加速度和位置,能够有效减小巡航系统规划的位置与车辆实际位置的偏差,提高行驶的安全性和效率,同时也能提升乘客的乘坐体验。
- 还没有人留言评论。精彩留言会获得点赞!