一种基于功率消耗和扭矩补偿的需求扭矩估算方法与流程
本发明涉及新能源车辆,具体涉及一种基于功率消耗和扭矩补偿的需求扭矩估算方法。
背景技术:
1、随着新能源汽车技术的不断发展,对车辆动力控制系统的要求也日益提高。传统的需求扭矩估算方法往往无法精确反映车辆实际状态,导致驾驶性能下降和能源浪费。在纯电车辆的开发过程中,车辆扭矩控制作为驱动系统核心技术,准确估算车辆需求扭矩是实现车辆高效运行和良好驾驶体验的关键。纯电车动力系统跟传统燃油车不同,它们常常采用电池和电动机来驱动,而这些组件的性能和状态会受到各种因素的影响,比如电池温度、剩余soc,以及电动机的实时工作状态等,在电池电量不足或温度异常时,电动机的性能可能会受到影响,导致扭矩输出不足或波动,影响到车辆能耗、续驶里程以及整车的安全性能。此外纯电车在启动和加速过程中,电动机的扭矩响应非常迅速,由于对电机的输出扭矩不能进行精准控制,车辆的加速线性度可能不够,导致车辆突然加速或产生顿挫感。这种不稳定的动力输出不仅会降低驾驶的舒适性,还可能对车辆的零部件造成磨损。
技术实现思路
1、本发明的目的是要克服现有技术的不足,提出提供了一种基于功率消耗和扭矩补偿的需求扭矩估算方法,通过基于模糊控制的扭矩补偿,对需求扭矩进行动态调整。
2、为了解决上述背景技术中的问题,本发明是通过以下技术方案来实现的:
3、一种基于功率消耗和扭矩补偿的需求扭矩估算方法,包括:
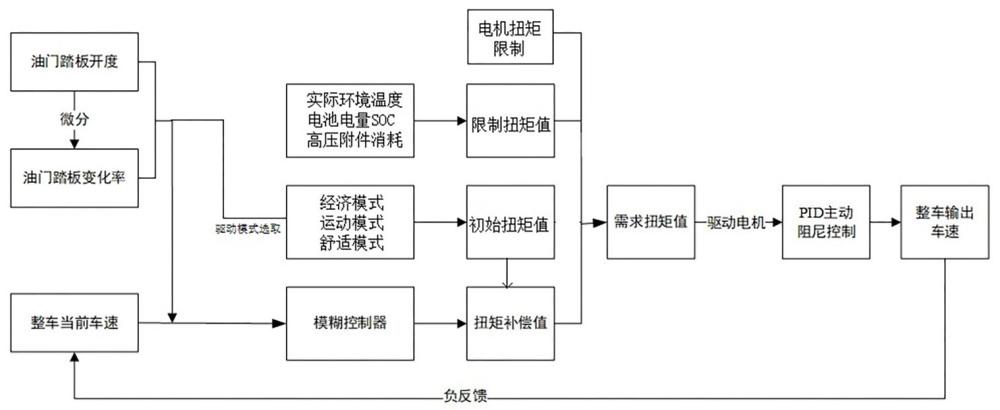
4、整车驱动时,根据各部件传感器实时监测车辆的油门踏板开度ped、车速 ν及油门踏板开度变化率dped参数,对油门踏板开度ped进行滤波处理,根据当前电机转速、油门踏板开度变化率dped参数及滤波后的油门踏板开度ped进行驾驶员意图的期望扭矩输出及整车驱动模式识别,计算得到初始扭矩 tq;
5、根据实际环境温度、电池剩余soc计算电池消耗及电池过流功率跟随限制,以及高压附件估算限制扭矩 tlim;
6、以油门踏板开度ped及油门踏板开度变化率dped、车速 ν为输入,进行模糊化处理后根据制定的控制规则,确定补偿扭矩 tini;
7、取限制扭矩 tlim、补偿扭矩 tini及电机扭矩限制 tmotmax其中的最小值,作为需求扭矩 tqdem。
8、进一步的,所述驾驶员意图的期望扭矩输出为,根据电机当前转速与不同模式下油门踏板开度ped标定,通过查表计算d挡位时的驾驶员期望扭矩需求;
9、所述整车模式识别为满足驱动条件,具体为在整车驱动下,档位驱动模式且无制动踏板介入;
10、当满足驱动条件后,计算得到初始扭矩 tq:
11、 tq= accped× tmax;
12、其中 accped为d档驱动模式下油门踏板开度值、 tmax为电机当前转速对应的最大驱动扭矩。
13、进一步的,所述限制扭矩 tlim为:
14、;
15、;
16、其中,电池过流系数为 ß, n为电机转速,tmot为电机反馈的实时扭矩,电池最大允许放电功率为 pbmax,电池实际放电功率为 pbart,电池实际电压为ubart,电池最大允许脉冲放电电流为ibmax,电池实时放电电流为ibart, pbmax-pbart为电池过流超限功率,包含高压附件耗电功率 paux,整车高压线束耗电功率plin;
17、所述高压附件包括dcdc变换器、ac空调压缩机、pct加热器;
18、因外界环境温度和电池soc对扭矩限制是通过电池最大允许脉冲放电电流ibmax来实现的,依据实时放电电流ibart与当前电池最大允许脉冲放电电流ibmax的差值来调节扭矩,即根据实际环境温度和电池剩余soc、电池内耗、高压附件耗电功率 paux,整车高压线束耗电功率plin,对限制扭矩 tlim进行估算。
19、进一步的,根据实际车速在初始扭矩 tq的基础上再部分补偿扭矩 tcomp,用以提高动力输出,以实现驾驶员在急加速的情况下的驾驶意图,补偿扭矩 tini为:
20、 tini= tq+ tcomp。
21、进一步的,由于过大的部分补偿扭矩 tcomp会造成车辆产生冲击和抖动,为了保证整车的舒适性,需要根据 冲击度k对部分补偿扭矩 tcomp进行限制,冲击度 k公式为:
22、;
23、其中, a为加速度、 ν为车速,冲击度 k以加速度变化率表示则为 da/ dt,冲击度 k以车速表示则为d2 ν/ dt 2。
24、进一步的,所述补偿扭矩 tini采用模糊控制算法,将油门踏板开度ped、车速 ν及油门踏板开度变化率dped作为输入,补偿扭矩 tini作为输出,建立扭矩补偿模糊规则表;其中油门踏板开度变化率dped包含五个模糊子集:vs1、s1、m1、b1、vb1,论域为0-100%;车速 ν的变量包括三个模糊子集:s2、m2、b2,论域为0-120km/h;油门踏板开度ped包括三个模糊子集:s3、m3、b3,论域为0-100%;补偿扭矩 tini包括七个模糊子集:es、vs2、s4、m4、b4、vb2、eb,论域为0-30nm;
25、其中es为极小、vs1、vs2为较小、s1、s2、s3、s4为小、m1、m2、m3、m4为中、b1、b2、b3、b4为大、vb1、vb2为较大、eb为极大。
26、进一步的,整车在起步或爬坡时,车速为较小vs速段,此时为了获得更足的动力性,需要提高相同油门踏板开度ped下的扭矩变化量,则通过给予较大vb或极大eb的补偿转矩 tini以满足加速需求;
27、当整车在城郊市区或者国道路段上行驶时,车速为中m速段,车辆的加速需求多为超车加速工况,油门踏板开度ped的扭矩变化量适中,则增加s、m或b的补偿转矩 tini;
28、当整车在高速段行驶时,为了保持较大vb车速,保持处于恒功率区间,油门踏板开度变化率dped及油门踏板开度ped的扭矩变化量较小,此时补偿较小vs或极小es的补偿转矩 tini。
29、进一步的,所述需求扭矩 tqdem为:
30、 tqdem=min( tmax, tlim, tini);
31、需求扭矩 tqdem输出后 ,当检测到驱动电机扭矩波动超过阈值时,进行pid主动阻尼控制防抖,对驱动电机的期望输出扭矩进行平顺性处理,防止抖动从而提高车辆的行驶稳定性。
32、与现有技术相比,本发明具有以下有益的技术效果:
33、综合考虑实际工况下不同环境温度及不同soc电量状态对电池放电电流大小的影响,结合整车高压附件的功率消耗,对整车电机的需求扭矩进行估算;同时为了保证整车动力输出的稳定性、经济性能和驾驶体验等方面,以油门踏板开度,油门踏板开度变化率及当前车速作为模糊控制的输入,以补偿扭矩作为输出,构建模糊控制表对车辆的动力系统以实际需求扭矩进行扭矩补偿,对需求扭矩进行精确估算,以提高新能源汽车的动力稳定性、经济性和驾驶性能。
- 还没有人留言评论。精彩留言会获得点赞!