车辆的控制方法、装置和车辆与流程
本技术属于车辆,尤其涉及一种车辆的控制方法、装置和车辆。
背景技术:
1、对于电驱桥动力构型的纯电牵引车,电驱桥的结构紧凑,使得纯电牵引车难以再有足够空间布置差速锁结构,对于无差速锁的电驱桥牵引车,在打滑场景下往往无法脱困和行驶,对车辆的正常运营造成不便。相关技术中存在通过手动降低车速以输出更大扭矩,从而帮助车辆脱困的方法,但该方法可能会因驾驶员未操作或操作不当导致车辆无法脱困,且需要频繁手动操作,从而影响驾驶者的行车安全。
技术实现思路
1、本技术旨在至少解决相关技术中存在的技术问题之一。为此,本技术提出一种车辆的控制方法、装置和车辆,使得车辆的两侧车轮均可以运动,进而帮助车辆脱困;可以自动检测车轮的轮速并控制车轮的工作模式,无需驾驶员手动操作,提升了驾驶者的行车安全。
2、第一方面,本技术提供了一种车辆的控制方法,所述车辆包括从动车轮对和至少一组驱动车轮对,所述从动车轮对包括两个从动轮,每组所述驱动车轮对包括两个驱动轮;所述方法包括:
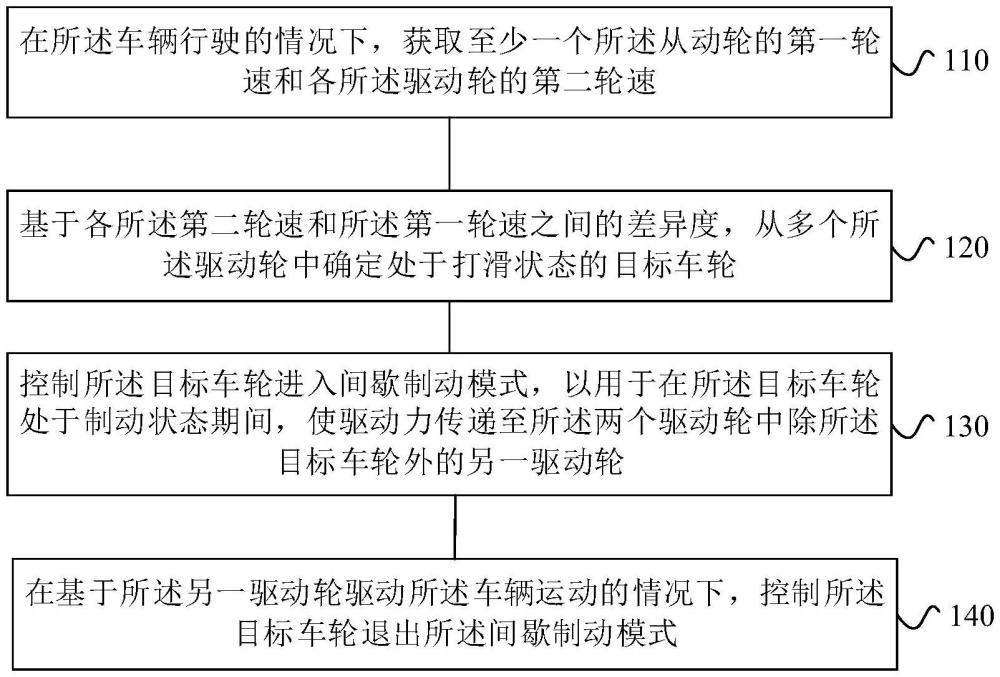
3、在所述车辆行驶的情况下,获取至少一个所述从动轮的第一轮速和各所述驱动轮的第二轮速;
4、基于各所述第二轮速和所述第一轮速之间的差异度,从多个所述驱动轮中确定处于打滑状态的目标车轮;
5、控制所述目标车轮进入间歇制动模式,以用于在所述目标车轮处于制动状态期间,使驱动力传递至所述两个驱动轮中除所述目标车轮外的另一驱动轮,所述另一驱动轮与所述目标车轮位于同一车轴的两端;
6、在基于所述另一驱动轮驱动所述车辆运动的情况下,控制所述目标车轮退出所述间歇制动模式。
7、根据本技术实施例提供的车辆的控制方法,通过对比驱动轮的轮速和从动轮的轮速之间的差异,可以确定处于打滑状态下的驱动轮,并控制打滑的驱动轮进入间歇制动模式,使得该驱动轮可以处于低速但不抱死的状态,从而可以将动力传递至高附着率的车轮,使其旋转起来,使得车辆的两侧车轮均可以运动,进而帮助车辆脱困;可以自动检测车轮的轮速并控制车轮的工作模式,无需驾驶员手动操作,提升了驾驶者的行车安全。
8、本技术一个实施例的车辆的控制方法,所述控制所述目标车轮进入间歇制动模式,包括:
9、在所述目标车轮包括分别位于同一车轴两端的多个驱动轮的情况下,控制所述多个驱动轮交替进入所述间歇制动模式;
10、在所述目标车轮包括位于同一车轴唯一一端的驱动轮的情况下,控制所述位于同一车轴唯一一端的驱动轮进入所述间歇制动模式。
11、本技术一个实施例的车辆的控制方法,所述控制所述位于同一车轴唯一一端的驱动轮进入所述间歇制动模式,包括:
12、在一个所述间歇制动模式的周期内,控制所述位于同一车轴唯一一端的驱动轮进入制动模式;
13、在控制所述位于同一车轴唯一一端的驱动轮进入所述制动模式第一时长之后,控制所述位于同一车轴唯一一端的驱动轮退出所述制动模式。
14、本技术一个实施例的车辆的控制方法,所述控制所述多个驱动轮交替进入所述间歇制动模式,包括:
15、在一个交替进入所述间歇制动模式的周期内,控制所述多个驱动轮中第一驱动轮进入制动模式,并控制所述多个驱动轮中第二驱动轮的工作模式不变;
16、在控制所述第一驱动轮进入所述制动模式第一时长之后,控制所述第一驱动轮退出所述制动模式,并控制所述第二驱动轮进入所述制动模式;
17、在控制所述第二驱动轮进入所述制动模式第一时长后,控制所述第二驱动轮退出所述制动模式。
18、本技术一个实施例的车辆的控制方法,一个所述间歇制动模式的周期包括第一时长和释放时长,所述第一时长小于所述释放时长,所述第一时长为在一个所述间歇制动模式的周期内,所述目标车轮进入制动模式的时长,所述释放时长为在一个所述间歇制动模式的周期内,所述目标车轮进入非制动模式的时长。
19、本技术一个实施例的车辆的控制方法,所述控制所述目标车轮退出所述间歇制动模式,包括:
20、在控制所述目标车轮进入所述间歇制动模式的过程中,获取所述目标车轮在非制动状态下的新的第二轮速;
21、基于所述新的第二轮速和所述第一轮速之间的差异度,控制所述目标车轮退出所述间歇制动模式。
22、本技术一个实施例的车辆的控制方法,在所述至少一组驱动车轮对的数量为两组,位于同一车轴上的两个驱动轮分别通过驱动半轴与电机连接的情况下,所述控制所述目标车轮进入间歇制动模式,包括:
23、控制各组所述驱动车轮对所对应的电机以相同的转速转动;
24、控制所述目标车轮进入所述间歇制动模式。
25、第二方面,本技术提供了一种车辆的控制装置,所述车辆包括从动车轮对和至少一组驱动车轮对,所述从动车轮对包括两个从动轮,每组所述驱动车轮对包括两个驱动轮;所述装置包括:
26、第一处理模块,用于在所述车辆行驶的情况下,获取至少一个所述从动轮的第一轮速和各所述驱动轮的第二轮速;
27、第二处理模块,用于基于各所述第二轮速和所述第一轮速之间的差异度,从多个所述驱动轮中确定处于打滑状态的目标车轮;
28、第三处理模块,用于控制所述目标车轮进入间歇制动模式,以用于在所述目标车轮处于制动状态期间,使驱动力传递至所述两个驱动轮中除所述目标车轮外的另一驱动轮,所述另一驱动轮与所述目标车轮位于同一车轴的两端;
29、第四处理模块,用于在基于所述另一驱动轮驱动所述车辆运动的情况下,控制所述目标车轮退出所述间歇制动模式。
30、根据本技术实施例提供的车辆的控制装置,通过对比驱动轮的轮速和从动轮的轮速之间的差异,可以确定处于打滑状态下的驱动轮,并控制打滑的驱动轮进入间歇制动模式,使得该驱动轮可以处于低速但不抱死的状态,从而可以将动力传递至高附着率的车轮,使其旋转起来,使得车辆的两侧车轮均可以运动,进而帮助车辆脱困;可以自动检测车轮的轮速并控制车轮的工作模式,无需驾驶员手动操作,提升了驾驶者的行车安全。
31、第三方面,本技术提供了一种车辆,包括:
32、从动车轮对,所述从动车轮对包括两个从动轮;
33、至少一组驱动车轮对,每组所述驱动车轮对包括两个驱动轮;
34、控制器,所述控制器与各所述从动轮和各所述驱动轮连接,所述控制器用于基于如第一方面所述的车辆的控制方法控制所述车辆行驶。
35、根据本技术实施例提供的车辆,通过对比驱动轮的轮速和从动轮的轮速之间的差异,可以确定处于打滑状态下的驱动轮,并控制打滑的驱动轮进入间歇制动模式,使得该驱动轮可以处于低速但不抱死的状态,从而可以将动力传递至高附着率的车轮,使其旋转起来,使得车辆的两侧车轮均可以运动,进而帮助车辆脱困;可以自动检测车轮的轮速并控制车轮的工作模式,无需驾驶员手动操作,提升了驾驶者的行车安全。
36、本技术一个实施例的车辆,所述至少一组驱动车轮对的数量为两组。
37、第四方面,本技术提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的车辆的控制方法。
38、第五方面,本技术提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的车辆的控制方法。
39、第六方面,本技术提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的车辆的控制方法。
40、本技术实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
41、通过对比驱动轮的轮速和从动轮的轮速之间的差异,可以确定处于打滑状态下的驱动轮,并控制打滑的驱动轮进入间歇制动模式,使得该驱动轮可以处于低速但不抱死的状态,从而可以将动力传递至高附着率的车轮,使其旋转起来,使得车辆的两侧车轮均可以运动,进而帮助车辆脱困;可以自动检测车轮的轮速并控制车轮的工作模式,无需驾驶员手动操作,提升了驾驶者的行车安全。
42、进一步地,对于同轴的两侧车轮均处于打滑状态的情况下,控制一侧的驱动轮进入单边制动,然后再控制另一侧的驱动轮进入单边制动,交替控制左右侧车轮单边间歇性制动,在限制了车轮打滑的情况下,还保证了车轮具备低速驱动转速,从而能够有效帮助车辆脱困。
43、更进一步地,对于具有双驱动轴的车辆,在检测到车轮打滑的情况下,控制驱动轴对应的电机保持同步转速,可以在没有物理机械轴间差速锁的情况下实现双驱动桥的驱动转速同步,从而有助于控制处于打滑状态的车轮进入间歇制动模式。
44、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!