一种车辆动态控制方法、车辆动态控制系统以及车辆与流程
本技术涉及车辆,具体而言,涉及一种车辆动态控制方法、车辆动态控制系统以及车辆。
背景技术:
1、高速行驶时的车辆稳定性车辆安全的终点。传统的车辆控制系统,如abs(防抱死制动系统)、esc(电子稳定控制系统)和tcs(牵引力控制系统)等,主要侧重于在紧急情况下保持车辆的操控性。
2、然而,这些系统在车辆以高车速行驶时,尤其是在不平整或特殊路面条件下,仍然存在一定的局限性。当车辆在积水路面上车辆高速行驶,当单侧车轮或者单个前轮进入积水路面时,车轮无法及时将路面上的积水排出,导致该侧的车轮无附着力,当车辆出现失稳的时候,车身稳定系统介入。
3、但是,现有技术中当车辆出现失稳时,车身稳定系统才介入,导致车身稳定系统介入时机偏晚,且车身稳定系统会基于驾驶员对转向的需求进行干预限制,当驾驶员经验不足乱打方向时,会导致车辆持续失稳。
技术实现思路
1、本技术的目的在于,针对上述现有技术中的不足,提供一种车辆动态控制方法、车辆动态控制系统及车辆,本技术可以准确抑制目标车辆可能产生的横摆,减小车辆失控的风险。
2、为实现上述目的,本技术实施例采用的技术方案如下:
3、第一方面,本技术一实施例提供了一种车辆动态控制方法,所述方法包括:
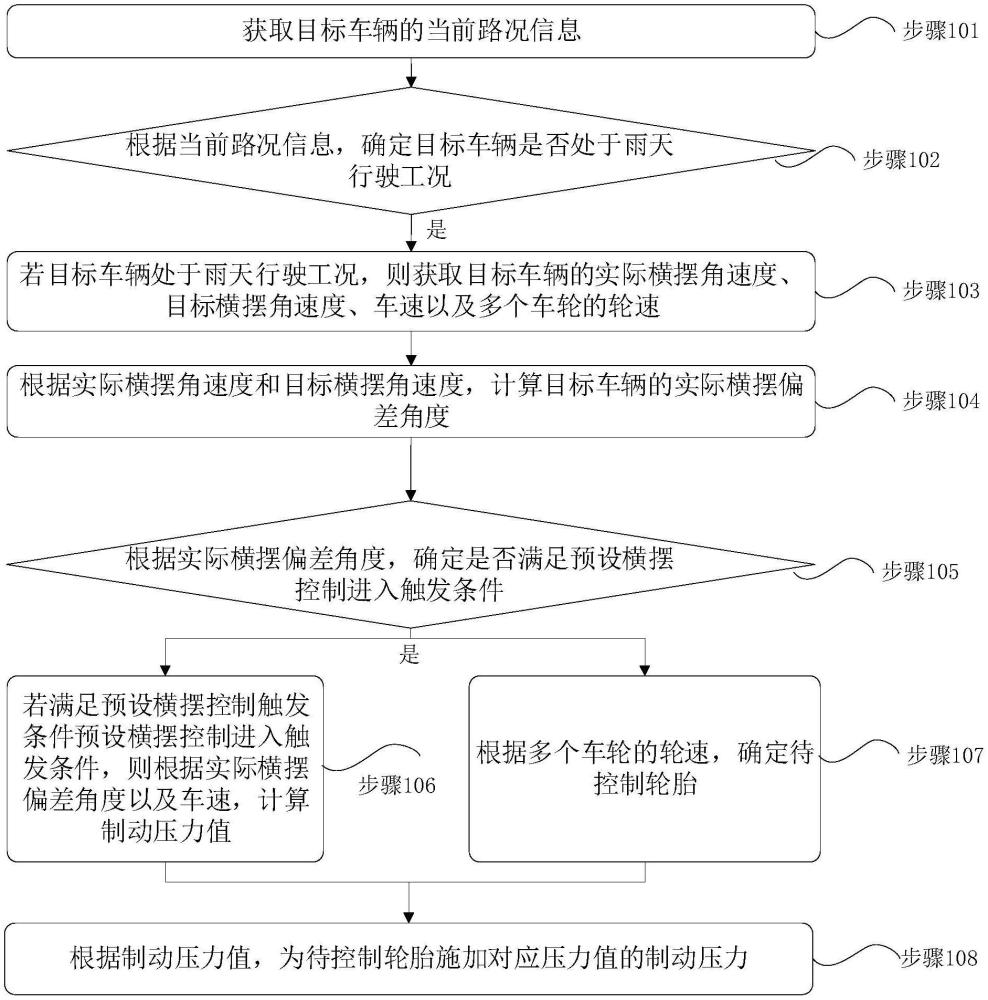
4、获取目标车辆的当前路况信息;
5、根据所述当前路况信息,确定所述目标车辆是否处于雨天行驶工况;
6、若所述目标车辆处于雨天行驶工况,则获取所述目标车辆的实际横摆角速度、目标横摆角速度、车速以及多个车轮的轮速;
7、根据所述实际横摆角速度和所述目标横摆角速度,计算所述目标车辆的实际横摆偏差角度;
8、根据所述实际横摆偏差角度,确定是否满足预设横摆控制进入触发条件;
9、若满足所述预设横摆控制进入触发条件,则根据所述实际横摆偏差角度以及所述车速,计算制动压力值;
10、根据所述多个车轮的轮速,确定待控制轮胎;
11、根据所述制动压力值,为所述待控制轮胎施加对应压力值的制动压力。
12、可选地,所述当前路况信息为所述目标车辆上的光学摄像头采集的路况图像;所述根据所述当前路况信息,确定所述目标车辆是否处于雨天行驶工况,包括:
13、对所述路况图像进行路面识别,得到所述目标车辆所在路面的目标路面类别以及道路摩擦系数;
14、确定所述道路摩擦系数,是否在所述目标路面类别对应的预设雨天路况摩擦系数范围;
15、若所述道路摩擦系数在所述目标路面类别对应的预设雨天路况摩擦系数范围内,则确定所述目标车辆处于雨天行驶工况。
16、可选地,所述获取所述目标车辆的实际横摆角速度、目标横摆角速度、车速以及多个车轮的轮速,包括:
17、从所述目标车辆的电子稳定系统获取所述实际横摆角速度、所述车速以及所述多个车轮的轮速;
18、从所述目标车辆的转向电子助力系统获取所述目标车辆的方向盘转向角;
19、根据所述方向盘转向角,计算所述目标横摆角速度。
20、可选地,所述根据所述实际横摆偏差角度,确定是否满足预设横摆控制进入触发条件,包括:
21、确定所述实际横摆偏差角度是否大于第一预设偏差阈值;
22、若所述实际横摆偏差角度大于所述第一预设偏差阈值,则确定满足所述预设横摆控制进入触发条件;
23、若所述实际横摆偏差角度小于或等于所述第一预设偏差阈值,则确定不满足所述预设横摆控制进入触发条件。
24、可选地,所述根据所述实际横摆偏差角度以及所述车速,计算制动压力值,包括:
25、根据所述实际横摆偏差角度以及所述车速,确定前轴制动力矩值和后轴制动力矩值;
26、根据所述前轴制动力矩值和所述后轴制动力矩值,采用预设制动力矩转化系数,分别计算前轴制动压力值和后轴制动压力值;所述制动压力值包括:所述前轴制动压力值和所述后轴制动压力值;
27、所述待控制轮胎包括:前轴待控制轮胎和后轴待控制轮胎;根据所述制动压力值,为所述待控制车轮的轮胎施加对应压力值的制动压力,包括:
28、根据所述前轴制动压力值和所述后轴制动压力值,分别为所述前轴待控制轮胎和所述后轴待控制轮胎施加对应压力值的制动压力。
29、可选地,所述根据所述实际横摆偏差角度以及所述车速,确定前轴制动力矩值和后轴制动力矩值,包括:
30、根据所述车速进行查表,得到所述车速下的基础制动力矩值;
31、根据所述实际横摆偏差角度和所述基础制动力矩值,计算目标制动力矩值,所述目标制动力矩值大于所述基础制动力矩值;
32、确定所述目标制动力矩值为所述前轴制动力矩值;
33、根据所述目标制动力矩值和预设后轴制动分配系数,确定所述后轴制动力矩值。
34、可选地,所述根据所述多个车轮的轮速,确定待控制轮胎,包括:
35、根据所述多个车轮的轮速,确定最低轮速车轮;
36、分别确定所述最低轮速车轮的对侧的前轴轮胎和后轴轮胎为所述前轴待控制轮胎和所述后轴待控制轮胎,其中,所述最低轮速车轮的对侧为:相对于所述目标车辆的预设车轮中轴线对称的对侧。
37、可选地,所述满足所述预设横摆控制进入触发条件之后,所述方法还包括:
38、确定预设横摆控制功能处于激活状态;
39、所述根据所述制动压力值,为所述待控制轮胎施加对应压力值的制动压力之后,方法还包括:
40、获取施加制动压力后的横摆偏差角度;
41、若所述施加制动压力后的横摆偏差角度小于或等于第二预设偏差阈值,则确定满足预设横摆控制退出触发条件,并控制所述预设横摆控制功能从激活状态切换为关闭状态;其中,所述第二预设偏差阈值小于所述第一预设偏差阈值。
42、第二方面,本技术另一实施例提供了一种车辆动态控制装置,所述装置包括:
43、第一获取模块,用于获取目标车辆的当前路况信息;
44、第一确定模块,用于根据所述当前路况信息,确定所述目标车辆是否处于雨天行驶工况;
45、第二获取模块,用于若所述目标车辆处于雨天行驶工况,则获取所述目标车辆的实际横摆角速度、目标横摆角速度、车速以及多个车轮的轮速;
46、第一计算模块,用于根据所述实际横摆角速度和所述目标横摆角速度,计算所述目标车辆的实际横摆偏差角度;
47、第二确定模块,用于根据所述实际横摆偏差角度,确定是否满足预设横摆控制进入触发条件;
48、第二计算模块,用于若满足所述预设横摆控制进入触发条件,则根据所述实际横摆偏差角度以及所述车速,计算制动压力值;
49、第三确定模块,用于根据所述多个车轮的轮速,确定待控制轮胎;
50、控制模块,用于根据所述制动压力值,为所述待控制轮胎施加对应压力值的制动压力。
51、第三方面,本技术另一实施例提供了一种计算机设备,包括:处理器、存储介质和总线,所述存储介质存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储介质之间通过总线通信,所述处理器执行所述机器可读指令,以执行如上述第一方面任一所述车辆动态控制方法的步骤。
52、第四方面,本技术另一实施例提供了一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如上述第一方面任一所述车辆动态控制方法的步骤。
53、第五方面,本技术另一实施例提供了一种车辆动态控制系统,所述车辆动态控制系统连接制动系统,用于执行如上述第一方面任一所述车辆动态控制方法的步骤。
54、第五方面,本技术另一实施例提供了一种车辆,所述车辆包括:上述第五方面所述的车辆动态控制系统。
55、本技术的有益效果是:
56、本技术提供一种车辆动态控制方法、车辆动态控制系统及车辆,通过获取目标车辆的当前路况信息;根据当前路况信息,确定目标车辆是否处于雨天行驶工况;若目标车辆处于雨天行驶工况,则获取目标车辆的实际横摆角速度、目标横摆角速度、车速以及多个车轮的轮速;根据实际横摆角速度和目标横摆角速度,计算目标车辆的实际横摆偏差角度;根据实际横摆偏差角度,确定是否满足预设横摆控制进入触发条件;若满足预设横摆控制进入触发条件,则根据实际横摆偏差角度以及车速,计算制动压力值;根据多个车轮的轮速,确定待控制轮胎;根据制动压力值,为待控制轮胎施加对应压力值的制动压力。本技术首先根据当前路况判断是否为雨天行驶工况,保证了目标车辆的进入控制模式更加准确,同时根据目标车辆多个速度,判断是否需要对目标车辆进行动态控制,进而对目标车辆进行控制,可以准确抑制目标车辆可能产生的横摆,减小车辆失控的风险。
- 还没有人留言评论。精彩留言会获得点赞!