本发明涉及爬行机器人,特别是一种海底爬行机器人多元数据采集的稳定辅助装置及方法。
背景技术:
1、随着深海开发战略的深入,对深海矿产资源和环境探测的科学需求不断增加,各种潜水器以成为必不可少的探测平台。深海矿产资源环境通常包括热液、冷泉、海山、深渊等特殊的深海构造单元,这些区域海底发育热液硫化物、天然气水合物、冷泉碳酸盐岩、多金属结核结壳等表生矿产资源,海底通常崎岖不平,正地形十分显著,沉积物与岩石、矿物呈不规则交互分布,部分区域有较强底流。通常深海矿产资源区海底探测除了采集视频影像数据外,还包括温盐深和各类化学传感器探测、近底地球物理探测、各类光学成像探测、地质、生物、水体及流体取样以及海底原位观测与实验等。这些探测、取样及原位实验都需要潜水器坐底精确探测,因此海底爬行机器人成为面对深海矿产资源崎岖复杂地形的最佳潜水器,但集成了多种传感器和设备的海底爬行机器人在运动越障同时采集稳定数据成为最需要解决的技术问题,这是高质量探测数据采集的保障基础。
2、海底爬行机器人采用履带移动方式,在地形崎岖复杂的海底具有牵引力大、不易打滑、越障性能好等优点,可以搭载摄像头、传感器、采样装置、实验仪器等在海底开展探测、采样、原位实验等科研活动。
3、海底爬行机器人在深海矿产资源区凹凸不平或底流较强的海底运动进行信息采集时,摄像头、传感器等出现因海底爬行机器人平台晃动颠簸,造成信息采集数据不稳定、数据缺失甚至采集失败;或者在进行热液喷口测温等原位实验时因海底爬行机器人出现晃动,打破实验精确性,造成实验数据不准或失败,因此在崎岖复杂的深海矿产资源区海底爬行机器人采集高质量数据信息或精确原位实验显得尤为必要和关键。
技术实现思路
1、本发明的目的在于克服现有技术存在的上述缺陷,提出了一种海底爬行机器人多元数据采集的稳定辅助装置及方法,大大提高了机器人在海底行走作业过程中的稳定性,提高了机器人水下实验或者观测数据的准确性。
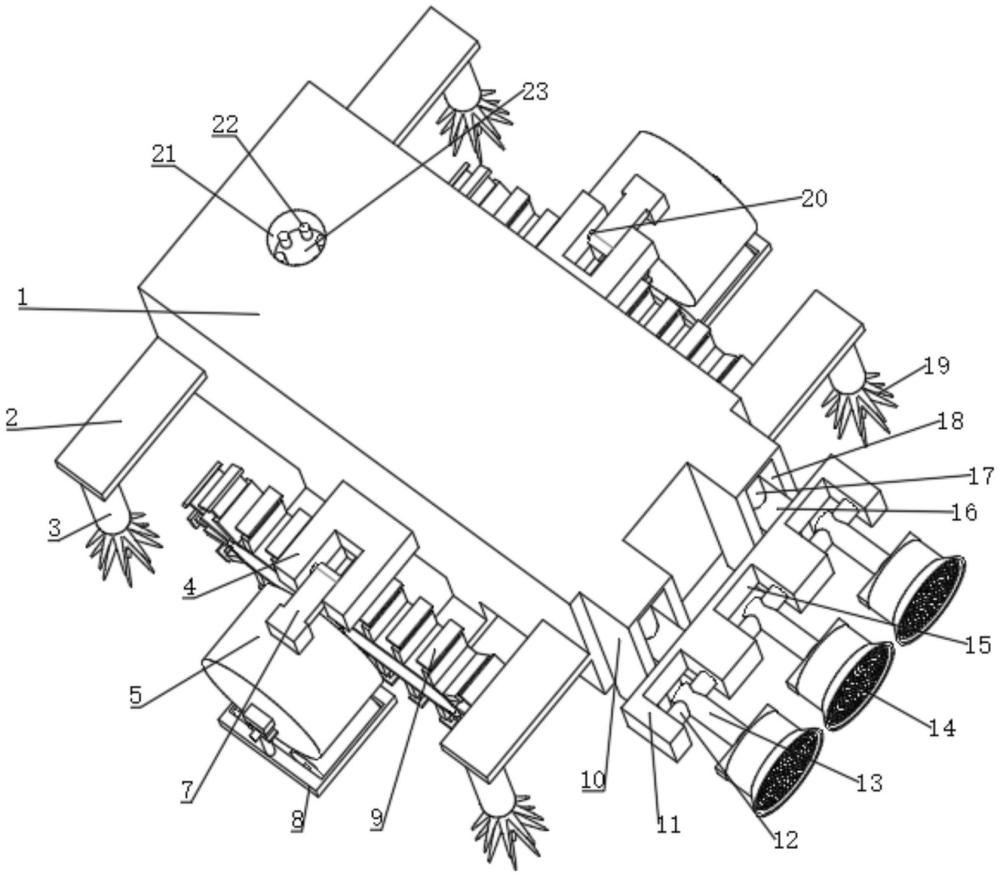
2、本发明的技术方案是:一种海底爬行机器人多元数据采集的稳定辅助装置,包括爬行机器人,其中,爬行机器人的底部设有辅助爬行机构;
3、爬行机器人的沿运动方向的两侧面处分别设有运动机构、支撑机构和稳定机构,两侧面的运动机构之间、两侧面的支撑机构之间和两侧面的稳定机构之间均呈对称设置;
4、爬行机器人背离运动方向的侧面处设有推动机构,爬行机器人的顶部表面设有信息采集机构。
5、本发明中,所述辅助爬行机构包括:
6、固定架,爬行机器人内设有底部呈开口状的固定腔,固定架可滑动地设置在固定腔内,固定架与固定腔的腔壁之间通过固定电动推杆连接;
7、固定钻头,可转动地套在固定轴上,固定钻头的内孔壁处设有数个连接槽,连接槽内设有与电动推杆连接的连接锥,在与连接槽的位置相对应的固定轴的环形侧壁处设有连接锥槽,连接锥插入连接锥槽内后,实现固定钻头与固定轴之间的固定连接;
8、固定转轴,固定轴通过固定方向调节轴与固定转轴固定连接,固定转轴的两端分别与转动块转动连接,固定转轴转动的过程中,使固定钻头在竖直方向与水平方向之间转动,转动块转动过程中实现固定钻头的转动。
9、与同一固定转轴连接的两转动块之间还通过限制杆固定连接,限制杆位于固定方向调节轴的上方。
10、运动机构包括:
11、运动架,通过运动支撑架与爬行机器人固定连接,运动架内设有运动齿轮腔,运动齿轮设置在运动齿轮腔内;
12、运动环形齿条,设置在运动架的环形外侧,运动环形齿条与运动齿轮之间相互啮合;
13、运动固定板,运动环形齿条的沿其长度方向间隔设有数个运动固定板,运动固定板内设有运动滑槽,运动板可滑动地设置在运动滑槽内,且运动板与运动滑槽的槽壁之间通过弹性元件连接。
14、所述运动架内设有增重机构;增重机构包括设置在运动架内部的封闭的储水腔,储水腔的一侧侧壁处设有抽取阀,对应的储水腔的另一侧侧壁处设有排出阀。
15、爬行机器人沿运动方向的两个侧面上分别设置有两个支撑机构,支撑机构包括:
16、支撑板,与爬行机器人的侧面固定连接;
17、支撑筒,与支撑板的底部表面固定连接,支撑筒内设有支撑滑槽,支撑滑槽内设有支撑螺纹筒,支撑螺纹筒能够在支撑滑槽内上下运动且转动,支撑滑槽内固定有竖直方向的支撑丝杆,支撑螺纹筒的上端与支撑丝杆之间呈螺纹连接,支撑螺纹筒的下端位于支撑滑槽的外侧,且支撑螺纹筒的下端固定有数个支撑锥。
18、所述稳定机构包括:
19、凹槽架,其一端与爬行机器人固定连接,另一端通过转向轴与转动架转动连接,转向轴与凹槽架的转动连接处设有转向机构和制动机构,通过转向机构实现转向轴的转动,通过制动机构实现对转向轴的制动;
20、转动架,其上端与凹槽架转动连接,下端与筒体固定连接;
21、筒体,其内部设有盛水腔,筒体的侧面处设有抽水泵和排水泵,通过抽水泵向盛水腔内注水,通过排水泵将盛水腔内的水排出;
22、矩形架,位于筒体的下方,且与筒体固定连接,矩形架内转动设有数个运动筒。
23、所述推动机构包括:
24、升降架,爬行机器人背离运动方向的侧面处、且沿水平方向间隔设有数个升降架,升降架内设有竖直方向设置的升降调节丝杆,升降调节丝杠与螺母块之间呈螺纹连接;
25、推动架,推动架的前端与螺母块的后端固定连接,推动架的后端间隔设有数个转动槽内,转动槽内设有可转动的方向调节转轴;
26、推动螺旋桨,推动杆的前端与方向调节转轴固定连接,推动杆的后端设有固定块,固定块上转动连接有推动转轴,推动螺旋桨固定在推动转轴上,推动螺旋桨的外侧设有防护罩。
27、信息采集机构包括:
28、信息采集槽,设置在爬行机器人的顶部表面;
29、采集电动丝杆,沿竖直方向设置在信息采集槽内;
30、信息采集螺母筒,可滚动且可滑动的设置在信息采集槽内,信息采集螺母筒与采集电动丝杆之间呈螺纹连接;
31、信息采集传感器,设置在信息采集螺母筒的顶部表面。
32、本发明还公开了一种利用上述海底爬行机器人多元数据采集的稳定辅助装置的稳定辅助方法,包括以下步骤:
33、s1、将爬行机器人放入到海水中,增重机构动作,整体的重量增加,使得整体下沉至海底位置;同时推动机构运动,推动所述爬行机器人加速下沉;
34、s2、装置下沉到海底位置后,运动机构运动,带动装置在海底运动的同时减缓震动;与此同时,推动机构同时动作,推动该装置在海底快速运动;
35、爬行机器人运动时,支撑机构实现对装置的支撑,防止运动时发生倾翻;
36、辅助爬行机构能够辅助爬行机器人在海底运动,并且在出现颠簸或较强底流的情况下,将爬行机器人固定在海底位置,防止被冲走;
37、稳定机构增加在海底运动的稳定性,增加整体的重量,防止颠簸或流体的影响,增加运动支撑的稳定性;
38、s3、当需要对指定海域进行信息采集时,信息采集机构运动,从而实现信息的采集;
39、s4、完成指定工作进行回收的过程中,增重机构动作,减轻装置整体的重量,便于整个装置的上浮;
40、与此同时,转向机构动作,带动筒体转向,便于装置的上浮,筒体转动到指定位置后,制动机构动作,对筒体的位置进行固定;
41、推动机构运动,推动爬行机器人上浮,实现装置的回收。
42、本发明的有益效果是:
43、(1)该装置可以通过辅助爬行机构实现辅助运动,辅助在海底行走,增加行走的稳定性,并且可以实现在出现颠簸或较强底流的情况下可以实现将该装置固定在海底,防止被冲走;
44、(2)该装置中可以实现增加装置的稳定性,在行走时进行支撑,增加装置的重量,使得在海底行走时更换稳定,防止行走时产生晃动,并且可以实现在海底信息采集完成后,辅助进行上浮,使得快速进行上浮;
45、(3)该装置可以实现在海底进行行走,在行走时可以实现减震,减小晃动,并且可以通过推动机构加速推动该装置的海底行走,提高在海底行走速度,提高信息采集的效率。