闭式空气悬架系统的控制方法、装置、设备、存储介质和程序产品与流程
本技术属于空气悬架控制的,尤其涉及一种闭式空气悬架系统的控制方法、装置、设备、存储介质和程序产品。
背景技术:
1、闭式空气悬架系统是一种将气泵、分配阀、悬架控制器等部件集成在一起,并在其内封存有一定压力的压缩空气的悬架系统。
2、闭式空气悬架系统包括空气弹簧、气泵、分配阀、储气罐和悬架控制器,在闭式空气悬架系统中,需要举升车身时,闭式空气悬架系统的悬架控制器会控制气泵会将储气罐内的压缩空气泵入空气弹簧内,从而增加空气弹簧内的气压,使车身升高,相反,在需要降低车身时,悬架控制器会控制对应的分配阀打开,使气泵将空气弹簧内的压缩空气泵回储气罐内,从而降低空气弹簧内的气压,使车身下降。
3、在上述闭式空气悬架系统控制的过程中,悬架控制器通常会通过驾驶人员设置的悬架模式得到对应的悬架控制参数,然后通过该悬架控制参数,控制对应气泵分配阀进行相应的动作,以控制空气悬架升高或降低空气悬架,但是常常因为悬架控制参数不能精准反映空气悬架的悬架高度,在空气悬架不满足车身高度的条件下,进行调节动作,从而导致不能精准控制的空气控制悬架的高度,影响空气悬架的调节。
技术实现思路
1、本技术实施例提供一种闭式空气悬架系统的控制方法、装置、设备、存储介质和程序产品,能够精准控制闭式空气悬架系统的工作情况,降低闭式空气悬架系统对车辆驾驶的影响。
2、一方面,本技术实施例提供一种闭式空气悬架系统的控制方法,所述闭式空气悬架系统包括依次管路连接储气罐、压缩机、电磁阀和空气弹簧;所述方法包括:
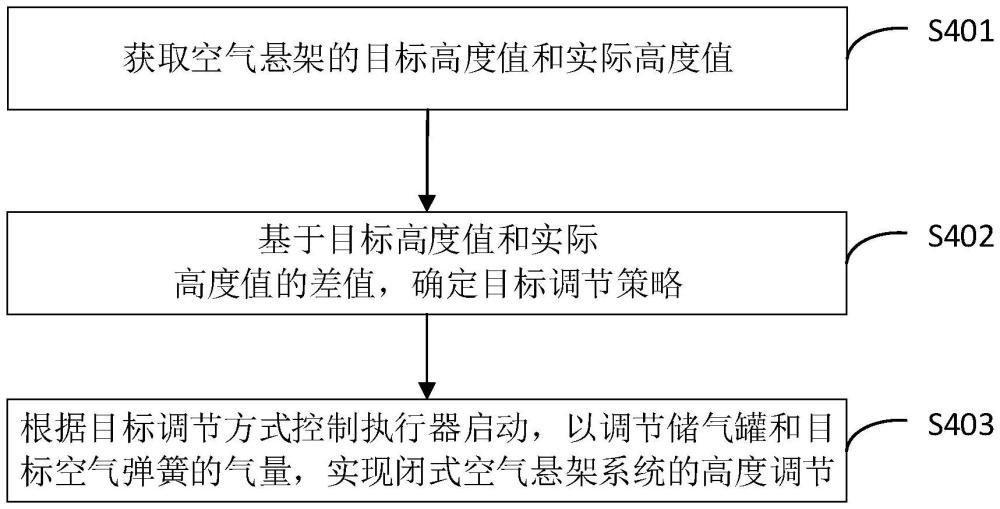
3、获取空气悬架的目标高度值和实际高度值;
4、在所述目标高度值和实际高度值的差值未处于预设误差范围的情况下,基于所述目标高度值和所述实际高度值的差值,确定目标调节策略,所述目标调节策略包括至少一个目标空气弹簧及其对应的目标调节方式;
5、根据所述目标调节方式控制执行器启动,以调节储气罐和所述目标空气弹簧的气量,实现闭式空气悬架系统的高度调节,所述执行器包括储气罐、电磁阀和压缩机中的至少一个。
6、可选地,所述空气悬架系统的实际高度值包括与车辆每个车轮各自对应的空气弹簧的实际高度值;
7、所述基于所述目标高度值和所述实际高度值的差值,确定目标调节策略,包括:
8、将所述差值未处于预设误差范围对应的空气弹簧确定为目标空气弹簧;
9、针对每个所述目标空气弹簧,基于所述差值,确定目标调节方式;
10、在所述目标空气弹簧的数量为多个的情况下,根据所述目标调节方式和预设调节优先级,生成目标空气弹簧的调节顺序,其中,所述预设调节优先级包括在目标调节方式确定为升高调节,且多个目标空气弹簧位于不同一车轴上的情况下,后轴升高调节的优先级高于前轴升高调节的优先级;在目标调节方式确定为降低调节,且多个目标空气弹簧位于不同车轴上的情况下,前轴降低调节的优先级高于后轴降低调节的优先级;在多个目标空气弹簧位于同一车轴上的情况下,轴调调节的优先级高于角调调节的优先级;
11、基于所述目标空气弹簧的所述目标调节方式和所述调节顺序,确定目标调节策略。
12、可选地,所述根据所述目标调节方式控制执行器启动,以调节所述目标空气弹簧的气量,实现闭式空气悬架系统的高度调节,包括:
13、获取所述储气罐的第一压力和所述目标空气弹簧的第二压力;
14、基于所述第一压力和所述第二压力,确定第一压力差;
15、基于所述第一压力差,确定执行器;
16、控制所述执行器启动,以调节所述目标空气弹簧的气量,实现闭式空气悬架系统的高度调节。
17、可选地,所述基于所述第一压力差,确定执行器,包括:
18、在所述第一压力差满足预设储气罐调节条件的情况下,将所述储气罐与所述目标空气弹簧之间的第一电磁阀确定为执行器,所述第一电磁阀包括控制所述储气罐与所述目标空气弹簧连通的电磁阀;
19、所述控制所述执行器启动,以调节储气罐和所述目标空气弹簧的气量,实现闭式空气悬架系统的高度调节,包括:
20、控制所述第一电磁阀打开,以使所述储气罐与所述目标空气弹簧连通,实现闭式空气悬架系统的高度调节。
21、可选地,在所述控制所述第一电磁阀打开之后,所述方法还包括:
22、获取所述目标空气弹簧的第一高度调节速度;
23、在所述第一高度调节速度小于第一预设调节速度的情况下,控制压缩机启动,以提高所述第一高度调节速度,实现闭式空气悬架系统的高度调节。
24、可选地,在所述第一压力差不满足预设储气罐调节条件,且所述第一压力差满足预设压缩机调节条件的情况下,将所述储气罐与所述目标空气弹簧之间的第一电磁阀和压缩机确定为执行器;
25、所述控制所述执行器启动,以调节储气罐和所述目标空气弹簧的气量,实现闭式空气悬架系统的高度调节,包括:
26、控制所述第一电磁阀打开,且控制所述压缩机启动,以使所述储气罐与所述目标空气弹簧连通,实现目标空气弹簧的调节。
27、可选地,在所述控制所述第一电磁阀打开,且控制所述压缩机启动之后,所述方法还包括:
28、获取所述目标空气弹簧的第二高度调节速度;
29、在所述第二高度调节速度小于第二预设调节速度的情况下,控制第二电磁阀打开,所述第二电磁阀包括控制所述空气悬架与外界连通的电磁阀。
30、另一方面,本技术实施例提供了一种闭式空气悬架系统的控制装置,所述闭式空气悬架系统包括依次通过管路连接的储气罐、电磁阀、压缩机和空气弹簧,该装置包括:
31、获取模块,用于获取空气悬架的目标高度值和实际高度值;
32、确定模块,用于在所述目标高度值和实际高度值的差值未处于预设误差范围的情况下,基于所述目标高度值和所述实际高度值的差值,确定目标调节策略,所述目标调节策略包括至少一个目标空气弹簧及其对应的目标调节方式;
33、控制模块,用于根据所述目标调节方式控制执行器启动,以调节储气罐和所述目标空气弹簧的气量,实现闭式空气悬架系统的高度调节,所述执行器包括储气罐、电磁阀和压缩机中的至少一个。
34、再一方面,本技术实施例提供了一种悬架控制器,所述设备包括:处理器以及存储有计算机程序指令的存储器;
35、所述处理器执行所述计算机程序指令时实现如第一方面所述的闭式空气悬架系统的控制方法。
36、再一方面,本技术实施例提供了一种计算机存储介质,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如第一方面所述的闭式空气悬架系统的控制方法。
37、再一方面,本技术实施例提供了一种计算机程序产品,所述计算机程序产品中的指令由悬架控制器的处理器执行时,使得所述悬架控制器执行如第一方面所述的闭式空气悬架系统的控制方法。
38、本技术实施例的闭式空气悬架系统的控制方法、装置、设备、存储介质和程序产品,在对闭式空气悬架的高度进行调节时,通过参考目标高度值和实际高度值来反映闭式空气悬架需要调节的精准的悬架高度,然后通过目标高度值和实际高度值确定目标空气弹簧及其对应的目标调节方式,根据目标调节方式控制执行器启动,以构建储气罐与目标空气弹簧的连通管路,从而改变目标空气弹簧的气量,来实现对闭式空气悬架的高度进行调整,相较于仅根据悬架控制参数进行闭式空气悬架高度的调节,本技术能够基于闭式空气悬架的实际高度值与目标高度值的差值对闭式空气悬架的高度进行调整,而该高度差能够准确反映出实际高度值与目标高度值的差异,所以通过该方法能够达到精准控制闭式空气悬架高度的效果。
- 还没有人留言评论。精彩留言会获得点赞!