车辆底盘悬架自动适应锁定系统和方法与流程
本发明属于无人驾驶车辆控制,具体涉及一种车辆底盘悬架自动适应锁定系统和方法。
背景技术:
1、无人驾驶车所用的悬挂为横臂式独立悬架,在车辆行驶时,底盘悬架处于上、下跳动状态,以保证车辆行驶时的通过性和稳定性。当在平坦路面低速运输特殊装备,要求车辆处于稳定状态时,就需要横臂式悬架系统不能在行驶中上下摆动。在静止状态下,车辆装载设备工作时,要求车辆不会受外载荷冲击导致横臂上下运动。因此,如何根据不同情况自动对车辆悬架摆臂进行机械锁定或解锁,以满足运输特殊装备及车辆上装备可靠、稳定工作的要求,称为本领域亟待解决的技术问题。
技术实现思路
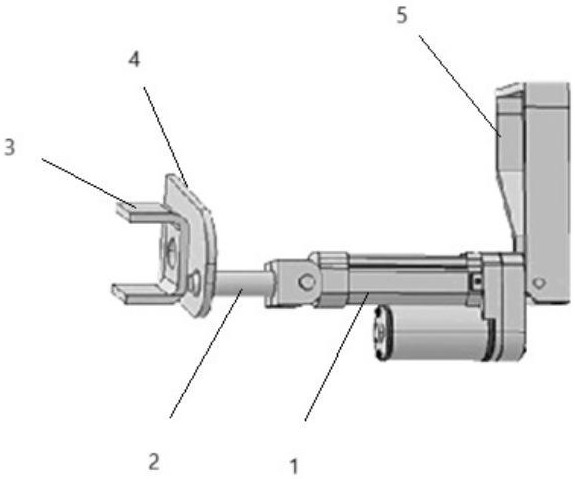
1、本发明提供了一种车辆底盘悬架自动适应锁定系统,所述系统包括:锁定机构和锁定控制装置,所述锁定机构包括电动推杆、销轴、横臂固定孔座、支撑立板、电动推杆固定座,所述锁定控制装置安装在车辆内部,包括状态检测单元、处理运算单元、锁定控制单元、操作终端;
2、所述电动推杆的固定端固定在所述电动推杆固定座上,所述电动推杆的伸缩端延长连接有所述销轴,所述支撑立板固定于车辆底盘,所述横臂固定孔座固定连接于横臂式独立悬架,所述横臂固定孔座、支撑立板上各自开设有固定孔,所述销轴穿设在所述横臂固定孔座的固定孔中,并且当所述电动推杆的伸缩端伸出时,所述销轴能够穿过所述横臂固定孔座的固定孔和所述支撑立板的固定孔,使横臂固定孔座与所述支撑立板彼此固定连接,从而使横臂式独立悬架与车体锁定,当所述电动推杆的伸缩端缩回时,所述销轴仅穿过所述横臂固定孔座的固定孔,不穿过所述支撑立板的固定孔,使横臂固定孔座与所述支撑立板彼此分离,从而使横臂式独立悬架与车体解锁;
3、所述状态检测单元用于接收所述操作终端发出的用于指示锁定或解锁的外部控制指令,以及车辆状态数据,并将所述外部控制指令和所述车辆状态数据发送到所述处理运算单元;
4、所述处理运算单元在接收到所述外部控制指令后,对所述车辆状态数据进行处理,根据处理结果向所述锁定控制单元发出锁定或解锁指令,或者向所述操作终端返回提示信息;
5、所述锁定控制单元接收到锁定指令后,控制所述电动推杆的伸缩端伸出,使横臂式独立悬架与车体锁定,所述锁定控制单元接收到解锁指令后,控制所述电动推杆的伸缩端缩回,使横臂式独立悬架与车体解锁;
6、所述操作终端用于接收操作人员的操作信号,或者来自工作设备的工作请求或工作停止信号,从而生成所述外部控制指令,所述操作终端还用于接收并显示来自所述处理运算单元的提示信息。
7、进一步,所述操作终端是与所述状态检测单元以及车辆装载的工作设备无线通信连接的移动终端,或者通过有线连接方式与所述状态检测单元以及车辆装载的工作设备连接的控制器;操作人员操作所述操作终端发出锁定或解锁的操作信号,或者,当车辆装载的工作设备准备进入工作状态时,向所述操作终端发出锁定的操作信号,当车辆装载的工作设备进入工作停止状态时,向所述操作终端发出解锁的操作信号;所述操作终端根据锁定的操作信号或解锁的操作信号,生成锁定的外部控制指令或者解锁的外部控制指令。
8、进一步,所述状态检测单元包括用于检测车辆行驶速度的速度传感器、用于检测车辆竖直方向运动加速度的加速度传感器、用于检测横臂式独立悬架上安装车轮角速度的角速度传感器;所述车辆状态数据包括车辆行驶速度、车辆竖直方向运动加速度和车轮角速度。
9、进一步,所述处理运算单元接收到所述外部控制指令后,如果判断接收到的所述外部控制指令为锁定的外部控制指令,则所述处理运算单元对接收到的所述车辆状态数据进行如下处理:
10、计算车轮滑移率:
11、
12、其中,为车轮的滑移率,为车轮角速度,为车辆行驶速度,为车轮半径,所述处理运算单元判断车轮滑移率并且车辆行驶速度和车辆竖直方向运动加速度均小于等于锁定阈值的情况下,向所述锁定控制单元发出锁定指令,否则,向所述操作终端返回提示信息,所述提示信息用于提示外部控制指令被拒绝;
13、所述处理运算单元接收到所述外部控制指令后,如果判断接收到的所述外部控制指令为解锁的外部控制指令,则所述处理运算单元判断车轮滑移率并且车辆行驶速度小于等于解锁阈值的情况下,向所述锁定控制单元发出解锁指令,否则,向所述操作终端返回所述提示信息。
14、进一步,所述车辆行驶速度的锁定阈值小于所述车辆行驶速度的解锁阈值,所述车辆行驶速度的锁定阈值具体为0-10km/h范围内的一个预设速度值,所述车辆行驶速度的解锁阈值具体为5km/h-25km/h范围内的一个预设速度值。
15、进一步,所述操作终端接收到提示信息后显示提示信息,提示外部控制指令无法执行。
16、进一步,所述操作终端接收到提示信息后显示提示信息,提示外部控制指令无法执行所述锁定控制单元接收到锁定指令后,控制所述电动推杆的伸缩端伸出,带动所述销轴移动,所述销轴的前端为半球体结构,能够在述横臂固定孔座的固定孔和所述支撑立板的固定孔未完全对齐的状态下,使所述销轴穿过所述横臂固定孔座的固定孔,使横臂式独立悬架与车体锁定;
17、所述锁定控制单元接收到解锁指令后,控制所述电动推杆的伸缩端缩回,带动所述销轴移动,使所述销轴移出并不再穿过所述横臂固定孔座的固定孔,使横臂式独立悬架与车体解锁。
18、本发明还涉及一种车辆底盘悬架自动适应锁定方法,所述方法用于如上所述的车辆底盘悬架自动适应锁定系统,所述方法包括下列步骤:
19、s1. 操作终端接收由操作人员或者车辆装载的工作设备发出的锁定或解锁的操作信号,对应生成锁定的外部控制指令或者解锁的外部控制指令,并发送到状态检测单元;
20、s2. 状态检测单元检测车辆行驶速度、车辆竖直方向运动加速度和车轮角速度,并将上述的车辆状态数据和所述外部控制指令发送到处理运算单元;
21、s3. 处理运算单元接收到所述外部控制指令后,如果判断接收到的所述外部控制指令为锁定的外部控制指令,则所述处理运算单元对接收到的所述车辆状态数据进行如下处理:
22、计算车轮滑移率:
23、
24、其中,为车轮的滑移率,为车轮角速度,为车辆行驶速度,为车轮半径,所述处理运算单元判断车轮滑移率并且车辆行驶速度和车辆竖直方向运动加速度均小于等于锁定阈值的情况下,执行步骤s4,否则,执行步骤s6;
25、如果所述处理运算单元判断接收到的所述外部控制指令为解锁的外部控制指令,则所述处理运算单元判断车轮滑移率并且车辆行驶速度小于等于解锁阈值的情况下,执行步骤s5,否则,执行步骤s6;
26、其中,所述车辆行驶速度的锁定阈值小于所述车辆行驶速度的解锁阈值。具体的,所述车辆行驶速度的锁定阈值具体为0-10km/h范围内的一个预设速度值,所述车辆行驶速度的解锁阈值具体为5km/h-25km/h范围内的一个预设速度值;
27、s4. 向锁定控制单元发出锁定指令,所述锁定控制单元接收到锁定指令后,控制所述电动推杆的伸缩端伸出,带动所述销轴移动,使所述销轴穿过所述横臂固定孔座的固定孔,使横臂式独立悬架与车体锁定;
28、s5. 向锁定控制单元发出解锁指令,所述锁定控制单元接收到解锁指令后,控制所述电动推杆的伸缩端缩回,带动所述销轴移动,使所述销轴移出并不再穿过所述横臂固定孔座的固定孔,使横臂式独立悬架与车体解锁;
29、s6. 向操作终端返回提示信息,所述提示信息用于提示外部控制指令被拒绝。
30、本发明还涉及一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行,用于执行如上所述的车辆底盘悬架自动适应锁定方法。
31、本发明还涉及一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序被处理器执行,用于执行如上所述的车辆底盘悬架自动适应锁定方法。
32、本发明的技术方案根据不同情况自动对车辆悬架摆臂进行机械锁定或解锁,以满足运输特殊装备及车辆上装备可靠、稳定工作的要求,并确保了仅在车辆未处于滑移状态的平稳低速行驶或停止的状态下,允许横臂式独立悬架与车体锁定,避免车辆速度过快的颠簸行驶时突然锁定带来的危险,避免对车辆造成损坏,同时在解锁时确保了车辆未处于严重滑移的高速行驶状态,避免在此情况下突然解锁带来的危险。
- 还没有人留言评论。精彩留言会获得点赞!