一种考虑多部件失效与能量回馈效率的能量回收方法与流程
本发明涉及车辆及工程机械车辆,特别是一种考虑多部件失效与能量回馈效率的能量回收方法。
背景技术:
1、目前市场上针对车辆的能量回收策略主要是在驾驶员松开油门踏板,进行滑行或制动时,整车控制器vcu根据不同车速对电机控制器动态下发制动力矩,产生制动力的同时将车辆动能转化为电能,电动机转为发电机为高压电池充电。如公开号cn115320395a的发明专利申请:汽车制动能量回收方法及装置,等。
2、但上述能量回收策略并未充分考虑电机若长时间工作于峰值制动扭矩下所带来的发热能耗与故障问题,尤其是多部件失效的情形,此时所回馈至电池的能量未必大于电池所输出能量,导致能量回收效率不高。而且,在电机或电池发生故障时如何进行安全制动也是亟待解决的问题。
技术实现思路
1、本发明的目的是提供一种考虑多部件失效与能量回馈效率的能量回收方法,较少电机发热能耗,提升车辆的能量回收效率,以及在多电气部件失效后制动过程中的安全性。本发明采用的技术方案如下。
2、一方面,本发明提供一种考虑多部件失效与能量回馈效率的能量回收方法,包括:
3、获取整车运行数据,所述整车运行数据包括车速、制动状态数据、故障状态数据、电池状态数据;
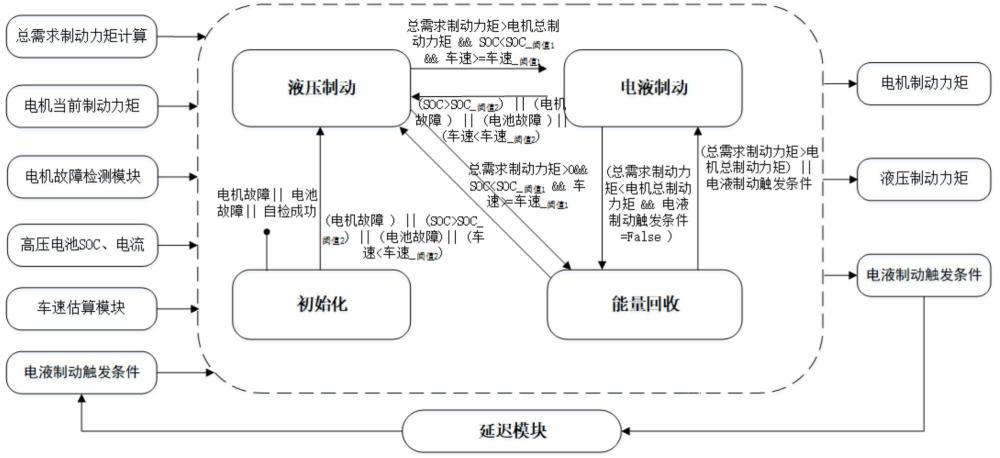
4、响应于接收到车辆制动信号,控制车辆制动模式为液压制动模式;
5、在液压制动模式下,使液压制动力矩匹配车辆总需求制动力矩,并根据车速、电池状态数据和制动状态数据,切换车辆制动模式至能量回收模式或电液制动模式;
6、在能量回收模式下,使电机制动力矩匹配车辆总需求制动力矩,并根据电池状态数据和制动状态数据,切换车辆制动模式至电液制动模式;
7、在电液制动模式下,使电机制动力矩与液压制动力矩之和匹配车辆总需求制动力矩,并根据电池状态数据和制动状态数据,切换车辆制动模式至能量回收模式;
8、在能量回收模式或电液制动模式下,若故障状态数据指示发生了电机故障或电池故障,则切换车辆制动模式至液压制动模式。
9、可选的,所述制动状态数据包括:车辆总需求制动力矩,根据制动踏板开度、车辆滑转率等参数计算得到;电机当前最大制动力矩,根据电机外特性map图、电机当前转速进行匹配计算得到;
10、所述故障状态数据包括电机故障状态数据和电池故障状态数据;
11、所述电池状态数据包括电池荷电状态soc和充放电电流。
12、上述车速可根据内外车轮转速进行计算得到;故障状态数据和电池状态数据可通过can总线直接获取。
13、可选的,方法还包括:响应于整车上电,液压制动力矩被配置为与整车需求制动力矩相匹配;整车控制器执行初始化操作;所述初始化操作包括:
14、进行程序自检、can驱动和io模块初始化;
15、若初始化完成且程序自检正常,则置自检成功标志位。
16、自检成功标志位置位后,车辆可进入行驶状态,整车控制器能够在行驶过程中接收踏板制动信号或驻车信号,以获取车辆制动需求,并首先进入液压制动模式。
17、可选的,在液压制动模式下,所述使液压制动力矩匹配车辆总需求制动力矩,并根据车速、电池状态数据和制动状态数据,切换车辆制动模式至能量回收模式或电液制动模式,包括:
18、使液压制动力矩等于车辆总需求制动力矩;
19、根据车速、电池状态数据和制动状态数据:
20、若满足:,则切换车辆制动模式至能量回收模式;
21、若满足:,则切换车辆制动模式至电液制动模式;
22、其中,表示车速,为预设的第一车速阈值,为电池荷电状态,为预设的第一soc阈值,表示车辆总需求制动力矩,为电机当前转速下的最大制动力矩。
23、以上技术方案中,第一车速阈值应当设置为一个较大值,第一soc阈值应当设置为一个较小值,表示当前车辆处于车速较高且电池容量较小的状态,则切换至能量回收模式可获得较高的能量回收效率。
24、可选的,所述第一车速阈值设置为15-25km/h,所述第一soc阈值设置为80%-85%。
25、可选的,方法还包括:在能量回收模式或电液制动模式下,根据电池状态数据和车速,若满足或者满足,则切换车辆制动模式至液压制动模式;
26、其中,表示设定的第二soc阈值,表示设定的第二车速阈值。
27、以上技术方案中,第二soc阈值应当设置为一个较大值,第二车速阈值应当设置为一个较小值,若相应的条件满足则表示当前车辆车速已经较小,或者电池剩余容量较小,此时若仍通过电机制动回收能量,则所回馈至电池的能量可能极小于电池所输出能量,能量回收效率较低,且易带来电池故障。
28、可选的,所述第二车速阈值设置为5-10km/h,所述第二soc阈值设置为90%-95%。
29、可选的,在能量回收模式下,使电机制动力矩匹配车辆总需求制动力矩,并根据电池状态数据和制动状态数据,切换车辆制动模式至电液制动模式,包括:
30、使电机制动力矩等于车辆总需求制动力矩;
31、根据电池状态数据判断是否满足电液制动转移条件,以及根据制动状态数据,判断是否满足:;若满足其一,则切换车辆制动模式至电液制动模式;
32、其中,所述电液制动转移条件为:电池回馈电流大于0且持续时间超过设定的第一时间阈值。
33、上述方案中,电液制动转移条件被触发则表示当前电机回馈能量小于电机所需散热能量,此时减少电机制动力矩,可有效避免电机长时间工作于峰值制动扭矩下所带来的发热能耗与故障问题。
34、可选的,在电液制动模式下,使电机制动力矩与液压制动力矩之和匹配车辆总需求制动力矩,并根据电池状态数据和制动状态数据,切换车辆制动模式至能量回收模式,包括:
35、使,、、分别表示时刻t的电机制动力矩、液压制动力矩和车辆总需求制动力矩;
36、根据电池状态数据判断是否满足电液制动转移条件,以及根据制动状态数据,判断是否满足:;
37、若不满足电液制动转移条件,且满足,则切换车辆制动模式至能量回收模式。否则维持电液制动模式。
38、可选的,在电液制动模式下,所述使电机制动力矩与液压制动力矩之和匹配车辆总需求制动力矩,包括:
39、继续获取电池回馈电流及其持续时间,判断是否满足电液制动转移条件且不满足,若符合则重新分配电机制动力矩与液压制动力矩,公式为:
40、,式中,为设定的力矩调整步长;
41、若电池回馈电流小于0且持续时间大于设定的第二时间阈值,则维持当前制动力矩分配方案。所述第二时间阈值可设置为10s左右,以能够可靠识别到回馈电流持续大于0或者小于0的工况。
42、进一步的,在能量回收模式下,若向电液制动模式转移的触发条件为满足电液制动转移条件,则进入电液制动模式的同时,以电机当前转速下的最大制动力矩为基准值降低设定的力矩调整步长,并使调整后的电机制动力矩和液压制动力矩满足。无需重新等待回馈电流>0且持续维持一段时间的条件,可以更好地保护电池,提升整体的能量回收效率。
43、第二方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时,实现第一方面所介绍的能量回收方法。
44、有益效果
45、本发明考虑能量回收效率和多部件失效时的制动安全性,综合车速、电池状态、制动需求、电机状态等信息,控制车辆在液压制动模式、能量回收模式和电液制动模式之间进行切换,避免电机发热能耗大于回馈能量导致的能量回收效率下降,有利于实现车辆回馈能量的最大化。同时本发明通过在能量回收阶段和电液制动阶段,根据车速、电池状态和多部件失效情况,强制切换车辆制动模式由液压制动系统接管,提升了整车多电气部件失效后制动过程的安全性。
- 还没有人留言评论。精彩留言会获得点赞!