基于机器视觉的铁路微小异物日夜探测装置的制作方法
1.本实用新型属于机器视觉技术领域,特别是涉及到一种基于机器视觉的铁路微小异物日夜探测装置。
背景技术:
2.铁路轨道上异物的存在是对高速列车行车安全的严重威胁,以往的人工巡检并不能保证发现异物的即时性,而由于列车速度快、制动距离长,依靠司机看到异物后的紧急反应动作也很难避免事故的发生,因此需要铁路异物检测系统对铁路异物尤其是微小异物进行即时检测。
3.目前用于铁路异物综合监测系统主要包括接触式和非接触式两种技术。接触式技术为在铁路上布置电网、电缆、光缆等分布式传感器,具有技术成熟、受环境影响小等优点,但其缺点也很明显,即造价高、施工难度大、维护成本高。非接触式技术主要包括激光雷达检测技术和机器视觉检测技术。其中激光雷达200米以内的在短距离的大体积异物监测具有显著的优点,可以提供异物的距离和位置信息,同时能够获取物体的三维信息,但在长距离、微小目标的监测技术上还有待发展,而现有的应用在铁路轨道的机器视觉检测技术并不完善,不能真正实现铁路微小异物的日夜即时和准确探测。
技术实现要素:
4.本实用新型提出一种基于机器视觉的铁路微小异物日夜探测装置,应用在机车上,为实现机车前方长距离、微小目标的异物检测提供必要的硬件支撑。
5.为达到上述目的,本实用新型的技术方案是这样实现的:
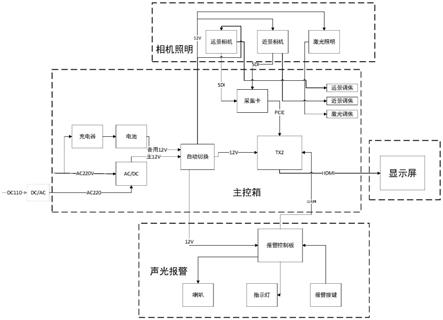
6.一种基于机器视觉的铁路微小异物日夜探测装置,包括探测光学部、照明部、主控部,输出部;所述探测光学部、输出部连接所述主控部;所述探测光学部包括近景探测器和远景探测器,近景探测器和远景探测器形成互补,实现机车前方高清视频采集,发送至主控部,所述主控部包括视频处理单元,将视频处理后输送至输出部;所述照明部包括激光照明光源,在探测光学部的视场范围内进行补光。
7.进一步的,所述主控部包括双路视频采集卡、视频处理单元tx2,所述景探测器和远景探测器分别通过sdi接口连接双路视频采集卡,所述双路视频采集卡通过pcie接口与视频处理单元tx2连接,所述视频处理单元tx2连接所述输出部。
8.更进一步的,所述视频处理单元tx2上安装sd存储卡,对图像进行实时存储。
9.更进一步的,所述主控部还设有电源,所述电源同时供电给探测光学部、照明部、输出部、视频处理单元tx2;所述电源采用双电源供电,主电源采用ac220供电,辅电源采用锂电池供电,双电源设有自动切换模块,当主电源断电时,自动切换至辅电源供电,主电源恢复时,自动切换回主电源供电。
10.再进一步,所述锂电池连接充电器,所述充电器连接主电源,主电源供电时同时给锂电池进行充电。
(近景相机)和远景探测器1
‑
2(远景相机)分别通过sdi接口连接双路视频采集卡,所述双路视频采集卡通过pcie接口与视频处理单元tx2连接,所述视频处理单元tx2通过hdmi高清视频线缆2
‑
1和显示屏供电线缆2
‑
2连接显示屏2,还通过以太网连接声光报警设备4内部的报警控制板,报警控制板分别连接控制声光报警设备4的报警指示灯4
‑
2,报警蜂鸣器4
‑
3,解除警报按键4
‑
4。
31.主控部3的电源除了供电给视频处理单元tx2,同时供电给探测光学部和照明部1的景探测器1
‑
1(近景相机)和远景探测器1
‑
2(远景相机)、激光照明光源1
‑
3,还供电给显示屏2和声光报警设备4;所述电源采用双电源供电,主电源采用ac220供电,辅电源采用锂电池供电,双电源设有自动切换模块,当主电源断电时,自动切换至辅电源供电,主电源恢复时,自动切换回主电源供电。另外所述锂电池连接充电器,所述充电器连接主电源,主电源供电时同时给锂电池进行充电,解决了铁路ac220供电时出现的分相间歇断电问题。
32.在主控箱上还设有若干按键,包括连接远景相机调焦的远景探测器调焦按键3
‑
1、连接近景相机调焦的近景探测器调焦按键3
‑
2、连接激光照明光源1
‑
3的激光照明光源调焦按键3
‑
3。
33.基于上述具体结构,本实用新型实施例中,探测光学部和照明部1中的探测光学部实现图像的采集;照明部用于低照度条件下的照明,辅助探测光学部采集图像;主控部3实现电源控制、加载图像识别算法和图像输出;显示屏2显示探测光学部采集后由视频处理单元tx2处理后传输的图像视频;声光报警设备4接收主控部3信息实时报警,当异物消除后报警自动解除。也可通过解除警报按键4
‑
4人工解除报警。各部分功能独立,线缆连接,可进行分布式安装。
34.探测光学部采集图像采用“远景+近景”结合的方式,远景探测器1
‑
2采用410mm变焦镜头,有效像素1920x1080,负责机车前方200~500m图像的采集,可对500m处,1.5cm微小异物进行探测。近景探测器1
‑
1采用130mm变焦镜头,有效像素1920x1080,负责机车前方200m内图像的采集。两个光学系统形成互补,实现机车前方500m内高清视频采集。
35.夜晚模式下,采用人眼安全的激光照明光源1
‑
3,在探测视场范围内进行补光,同时探测系统自动切换到夜晚黑白模式,实现了设备全天运行。
36.本实用新型实施例中,视频处理单元tx2采用jetson agx xavier平台,具有深度学习加速器dla和视觉加速器va,对双路视频采集卡的双路视频分别进行异物识别算法处理,再将识别结果叠加到原始视频,最后将两路视频融合到一个画面进行输出显示;视频处理单元tx2采用无线传输,具体采用以太网转4g方式,可以实现视频实时远距离无线传输。
37.本实用新型实施例中涉及的铁轨异物检测算法首先对探测光学系统拍摄的连续帧铁轨图像进行图像滤波去除噪声后,采用hough变换提取图像中直线特征,并采用基于迭代分块模板匹配方法对直线特征进行拟合可以获取直道和弯道双侧铁轨轨道面区域,根据轨道面将异物检测区域确定为轨道面区域和双轨间区域,对两个区域分别采用不同的异物检测算法。
38.对轨道面区域和双轨间区域的完整的检测流程如图3所示,轨道面区域采用拉普拉斯变换获取梯度特征,梯度特征聚类拟合,然后判定轨道面是否存在异物;双轨间区域首先通过卷积神经网络训练获取无异物双轨图像的目标模型,根据目标模型和采集的图形进行推演识别,判定双轨间是否存在异物。
39.上述算法和流程不属于本实用新型的保护范围内,对本实用新型“提供硬件结构支撑”的有益效果也不涉及,仅用于说明本实用新型的实际工作过程。
40.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1