改进的自动脱挂载人链车系统的制作方法
1.本实用新型涉及作业运输设备技术领域,特别涉及改进的自动脱挂载人链车系统。
背景技术:
2.随着社会经济和人民生活的水平提高,为了便利人们出行,特别是在一些诸如旅游景区较长山坡等使用场景中,为游客上下长坡提供便利。例如专利申请号:202121242389.2,申请日为2021年6月4日的一种自动脱挂载人链车系统,便公开了一种此类设备,其通过链条与接合器可拆连接实现轮椅和链条之间自动装配与分离。但该方案存在自动化程度低的缺陷。
技术实现要素:
3.为此,需要提供改进的自动脱挂载人链车系统,解决自动化程度低的缺陷。为实现上述目的,发明人提供了改进的自动脱挂载人链车系统,包括运行装置和控制装置,运行装置包括驱动总成、脱挂总成、车辆和车站,控制装置包括控制中心、车载设备和通联设备。
4.驱动总成包含链条、导轨和驱动座,链条与导轨滑动连接,导轨与驱动座固定连接,链条与驱动座传动连接,链条包括链节、推头和挂架,导轨的顶面设有开口,推头与链节铰接,并从导轨的开口穿出,挂架装配于推头上,挂架上设有矩形孔,驱动座包含驱动电机。
5.脱挂总成包含脱离器和挂合器,脱离器包含头段、中段和尾段,挂合器包含头轴、中腔、接口、插销和弹簧。
6.车辆包含车架、车轮、车座、车门、行走电机和车门电机,行走电机的输出轴连接滚轮,车门电机的输出轴连接车门。
7.车站包含候车室、站台、车库和站台电机,候车室位于车站的中心部位,站台环绕候车室,车库环绕站台,站台电机驱动站台转动。
8.控制中心包含中心微机、驱动变频器和控制台,车载设备包含车载微机、车载变频器、传感器和操作台,通联设备包含以太网、rs485和遥控开关。
9.进一步地,导轨包括下站导轨、上站导轨、上行导轨和下行导轨,下站导轨和上站导轨包含直线段和圆弧段,直线段的安装高度大于圆弧段的安装高度,直线段相对于所在地面的高度大于或等于上行导轨相对于所在地面的高度,小于或等于下行导轨相对于所在地面的高度。
10.进一步地,头段和尾段安装于直线段与圆弧段的连接处的上方,头段与链条的滑动方向相向设置,尾段与链条的滑动方向同向设置,头段和尾段的端部均为楔形,中段呈圆弧形设置于车库内。
11.进一步地,头轴连接车架的前端底部,中腔设置于头轴下方,接口设置于中腔下部,插销装配于接口内,弹簧配合插销安装,挂合器通过中腔与脱离器连接,或通过接口和插销与挂架连接。
12.进一步地,滚轮与中腔边沿配合安装,当中腔与脱离器连接时,滚轮与脱离器的一个面连接,驱动车辆沿脱离器行走。
13.进一步地,中心微机控制驱动变频器,驱动变频器控制驱动电机和站台电机,车载微机控制车载变频器和车门电机,车载变频器控制行走电机,通联设备实现控制中心与车载设备的有线和无线通讯联络,驱动电机、站台电机和行走电机的启动与停止同步,加速时间与减速时间相同,站台转动的角速度与车辆在车库内行走的角速度相同。
14.区别于现有技术,上述技术方案提供了改进的自动脱挂载人链车系统,通过改进驱动总成、脱挂总成、车站和车辆的设置,增加控制中心、车载设备和通联设备等控制装置,提高了整个系统的自动化程度。
附图说明
15.附图1为本实用新型实施例的俯视图。
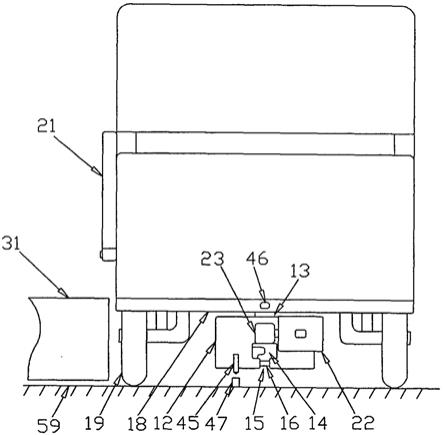
16.附图2为本实用新型实施例的主视图。
17.附图3为附图2中a局部放大图。
18.附图4为附图3中b-b剖面图。
19.附图5为附图3中c局部放大图。
20.附图6为本实用新型实施例中链条与导轨和驱动座连接示意图。
21.附图7为本实用新型实施例中车辆的主视图。
22.附图8为本实用新型实施例中车辆的左视图。
23.附图9为本实用新型实施例中车辆上坡和下坡行走示意图。
24.附图10为附图5中d-d剖面图。
25.附图11为附图8中e-e剖面图。
26.附图12为本实用新型实施例中控制中心控制电路图。
27.附图13为本实用新型实施例中车载设备控制电路图。
28.附图14为本实用新型实施例中中心plc梯形程序图。
29.附图15为本实用新型实施例中车载plc梯形程序图。
30.附图标记说明:
31.1.链条(链节)2.导轨3.推头4.挂架5.驱动座6.驱动电机(m)7.减速机8.脱离器9.头段10.中段11.尾段12.挂合器13.头轴14.中腔15.接口16.插销17.弹簧18.车辆(车架)19.车轮20.车座21.车门22.行走电机(m3)23.滚轮24.光栅传感器(sq1)25.开门限位开关(sq2)26.关门限位开关(sq3)27.操作台28.候车室29.进站口30.出站口31.站台32.车库33.站台电机(m1、m2)34.上站导轨35.下站导轨36.上行导轨37.下行导轨38.直线段39.圆弧段40.中心微机(plc)41.驱动变频器(vdf)42.控制台43.车载微机(plc1)44.车载变频器(vdf1)45.磁感应传感器(sq)46.车载雷达(rsm)47.第一磁块48.第二磁块49.第三磁块50.第四磁块51.第五磁块52.第六磁块53.第七磁块54.第八磁块55.第九磁块56.第十磁块57.第十一磁块58.疏散通道59.地面60.车门电机(m4)。
具体实施方式
32.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
33.在本技术的描述中,除非另有规定或说明,术语“连接”、“配合”、“固定”、“安装”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接,或电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。本技术实施例所描述的“上”、“下”、“左”、“右”、“前”、“后”等方位词是以附图所示的角度来进行描述的,不应理解为对本技术实施例的限定。
34.附图1、附图3和附图4所示,本实用新型实施例的平面图为哑铃形,两头的车站包含位于车站的中心部位候车室28、环绕候车室28的站台31,和环绕站台31的车库32,连接站台31与候车室28之间的进站口29、出站口 30,脱离器8的中段10呈圆弧形设置于车库31内,站台电机33连接站台31。两个车站的中间由闭环的导轨2和脱离器8相连接,车辆18布置于导轨2和脱离器8上,导轨2的中间部位布置疏散通道58,外侧布置控制中心42,脱离器8的一侧顺序布置第一磁块47至第十一磁块57,控制中心42包含中心微机(plc)40和驱动变频器(vdf)41,驱动变频器(vdf)41连接驱动电机6 和上站台电机33、下站台电机33。
35.附图2和附图5所示,导轨2包括上站导轨34、下站导轨35、上行导轨 36和下行导轨37,上站导轨34和下站导轨35包含直线段38和圆弧段39,直线段38的安装高度大于圆弧段39的安装高度,直线段38相对于所在地面 59的高度,小于下行导轨37相对于所在地面59的高度,大于上行导轨36相对于所在地面59的高度。脱离器8的头段9和尾段11安装于直线段38与圆弧段39的连接处的上方,头段9与链条1的滑动方向相向设置,尾段11与链条1的滑动方向同向设置,头段9和尾段11的端部均为楔形。
36.附图5、附图7所示,挂合器12的头轴13连接车架18的前端底部,中腔14设置于头轴13下方,接口15设置于中腔14下部,插销16装配于接口 15内。参阅附图10,挂合器12通过接口15和插销16与挂架4连接。
37.附图6所示,链节1铰接推头3,推头3装配挂架4,挂架4和链条1都是闭环结构,以使插销16与挂架4有效连接。参阅附图1,驱动座5与导轨 2连接,驱动电机6通过减速机7与链节1传动连接。参阅附图10,导轨2 的顶面设有开口,链节1安装在导轨2内,推头3从导轨2的开口穿出。
38.附图7所示,滚轮23与中腔14的边沿配合安装,参阅附图8,车辆18 包含车架18、车轮19、车座20、车门21、车载微机(plc)43、车载变频器 (vdf1)44、车门电机(m4)60、光栅传感器(sq1)24、开门限位开关(sq2)25、关门限位开关(sq3)26、操作台27和车载雷达(rsm)46,车门电机(m4)60的输出轴连接车门21,参阅附图11,当中腔14与脱离器8连接时,滚轮23与脱离器8的顶面连接,驱动车辆18沿脱离器8行走。
39.附图5、附图8和附图9所示,直线段38相对于所在地面59的高度大于上行导轨36相对于所在地面59的高度,小于下行导轨37相对于所在地面59 的的高度,车辆18不论是水平行走还是上坡或下坡行走,车架18始终保持水平状态。在某些优选实施例中,通过在车架18与车轮19之间设置调节器,自动调整车架18与车轮19之间的相对高度,进而维持车架18水平的状态。调节器具体可以为陀螺仪发送角度信号,控制电动伸缩杆进行调节的方式。
40.附图10和附图11所示,弹簧17配合插销16安装,弹簧17对插销16 产生向右边的推力。
41.附图12所示,本实用新型实施例通过总开关(qf)连接380伏交流三相电源(l1/l2/l3),中心微机(plc)40电源输入端子(l/n)连接单相电源(l1/n),中心微机(plc)40的输入端子(x0/x1/x2/x3)分别连接按钮开关(通电sb1/断电sb2/启动sb3/停止sb4)的一端,按钮开关(通电sb1/断电sb2/启动sb3/停止sb4)的另一端连接中心微机(plc)40电源输入零线端子(n),形成常开的控制回路。输入端子(x4)连接驱动变频器(vdf)41的故障常闭端子(tb/tc),和中间继电器(ka)的常闭端子(1/5),以及中心微机(plc)40电源输入零线端子(n),形成常闭的安全回路。中心微机 (plc)40的输出端子(y0)连接交流接触器(km)的线圈端子(a1),交流接触器(km)的线圈端子(a2)连接单相电源的火线(l1),中心微机(plc) 40的输出公共端子(com)连接单相电源的零线(n),形成交流接触器(km) 的控制回路。
42.驱动变频器(vdf)41的主回路输入端子(r/s/t)通过交流接触器(km)的常开主触点连接380伏交流三相电源(l1/l2/l3),输出端子(u/v/w)连接驱动电机(m)6和站台电机(m1/m2)33,驱动变频器(vdf)41的启动端子(fr) 连接中心微机(plc)40的输出端子(y1),驱动变频器(vdf)41的输入公共端子(com)连接中心微机(plc)40的输出公共端子(com1),形成驱动变频器(vdf)41的控制回路。
43.遥控器(rc1)和遥控开关(rk2)的电源输入端子连接单相电源(l1/n),遥控器(rc1)的按钮的引脚(1/4)分别连接中心微机(plc)40的输出端子 (y1)和公共端子(com),遥控开关(rk2)的输出端子连接中间继电器(ka) 的线圈端子(7/8)。
44.参阅附图14,在与中心微机(plc)40的输入端子(x4)连接的安全回路闭合的情况下,按下按钮开关(通电sb1),中心微机(plc)40的输出端子(y0)导通并自锁,交流接触器(km)常开主触点吸合,驱动变频器(vdf) 41的主回路输入端子(r/s/t)通电并处于待机状态,在此待机基础上,按下按钮开关(启动sb3),中心微机(plc)40的输出端子(y1)导通并自锁,驱动变频器(vdf)41控制驱动电机(m)6和站台电机(m1/m2)33启动,之后,按下按钮开关(停止sb4),中心微机(plc)40的输出端子(y1)断开并解锁,驱动变频器(vdf)41控制驱动电机(m)6和站台电机(m1/m2)33停止。任何时候按下按钮开关(断电sb2),或者驱动变频器(vdf)41故障导致常闭端子(tb/tc)断开,或者中间继电器(ka)的常闭端子(1/5)断开,都能使中心微机(plc)40的输出端子(y0)断开并解锁,交流接触器(km)常开主触点断开,驱动变频器(vdf)41主回路输入端子(r/s/t)断电,驱动电机(m)6和站台电机(m1/m2)33停止。
45.附图13所示,车载微机(plc1)43的电源输入端子(l/n)、车载变频器(vdf1)44的电源输入端子(l/n)和光栅传感器(sq1)24的电源输入端子,以及遥控开关(rk1)的电源输入端子,均连接单相电源(l/n),手动开门按钮开关(sb5)输入端连接单相电源火线l,遥控开关(rk1)的输出端连接 npn型的磁感应传感器(sq)45输入端,光栅传感器(sq1)24的输出端和手动开门按钮开关(sb5)的输出端连接中间继电器(ka1)的线圈端子(8),中间继电器(ka1)的线圈端子(7)连接单相电源的零线(n)。
46.车载变频器(vdf1)44的主回路输入端子(l/n)连接单相电源(l/n),输出端子(u/v/w)连接行走电机(m3)22。车载微机(plc1)43的输入端子(x0) 连接磁感应传感器(sq)45的输出端,车载微机(plc1)43的输入端子(x1)连接继电器(ka1)的触点端子(5),电器(ka1)的触点端子(3)连接单相电源的零线(n)。
47.车载微机(plc1)43的输出端子(y0/y1/y2/y3/com)分别连接车载变频器 (vdf1)44的输入端子(m1/d1/d2/d3/com),车载微机(plc1)43的输出端子(com1)连接单相电源火线(l),车载微机(plc1)43的输出端子(y4)连接关门限位开关(sq3)的输入端,车载微机(plc1)43的输出端子(y5)连接开门限位开关(sq2)的输入端,关门限位开关(sq3)的输出端连接单相可逆型车门电机(m4)60的正转线圈端子(a),开门限位开关(sq2)的输出端连接车门电机(m4)60的反转线圈端子(b),车门电机(m4)60的零线端子连接单相电源零线(n)。
48.遥控开关(rk1)的输出端子还连接车载雷达(rsm)的电源输入端和遥控器(rc2)的电源输入端。车载变频器(vdf1)的故障常开输出端子(ta/tc) 和按钮开关(停车sb6)的两端,以及车载雷达(rsm)输出端三者并联连接遥控器(rc2)按钮的引脚(1/4)。
49.参阅附图12和附图14,在与中心微机(plc)40的输入端子(x4)连接的安全回路闭合的情况下,按下按钮开关(通电sb1),中心微机(plc)40 的输出端子(y0)导通并自锁,交流接触器(km)常开主触点吸合,驱动变频器(vdf)41的主回路输入端子(r/s/t)通电处于待机状态,按下按钮开关(启动sb3),中心微机(plc)40的输出端子(y1)导通并自锁,驱动变频器(vdf)41控制驱动电机(m)6和站台电机(m1/m2)33启动,此时,遥控器(rc1)的按钮引脚(1/4)同步导通,遥控开关(rk1)接收到遥控器(rc1) 的导通信号后动作,遥控开关(rk1)输出端向磁感应传感器(sq)45、车载雷达(rsm)和遥控器(rc2)的电源输入端同时供电。
50.参阅附图5、附图10和附图11,当挂合器12运行至直线段38与圆弧段 39的连接处时,脱离器8的头端9插入挂合器12的所述中腔14中,推动插销16克服弹簧17的弹力向左移动,插销16脱离挂架4,挂架4从接口15处下降与插销16位置错开,挂合器12与链条1的脱离,车辆18在行走电机22 的驱动下在车库31内运行。参阅附图1和附图15,车辆18的运行速度和车门21的管理随磁感应传感器(sq)45经过不同位置而发生如下变化:
51.经过并感应第一磁块47,车载微机(plc1)43的输出端子(y0)导通并保持,行走电机(m3)22启动并以零段速运行;
52.经过并感应第二磁块48,车载微机(plc1)43的输出端子(y1)导通并保持,行走电机(m3)22以第一段速运行;
53.经过并感应第三磁块49,车载微机(plc1)43的输出端子(y2)导通并保持,行走电机(m3)22以第二段速运行;
54.经过并感应第四磁块50,车载微机(plc1)43的输出端子(y3)导通并保持,行走电机(m3)22以第三段速运行;
55.经过并感应第五磁块51,车载微机(plc1)43的输出端子(y4)导通,车门电机(m4)60反转线圈端子(b)得电,车门电机(m4)60反转开门,直至开门限位开关25断开;
56.经过并感应第六磁块52,车载微机(plc1)43的输出端子(y5)导通,车门电机(m4)60正转线圈端子(a)得电,车门电机(m4)60正转关门,在关门过程中,若手动开门按钮(sb5)按下,或者光栅传感器(sq1)24检测到门口障碍物时,继电器(ka1)的引脚(8)得电,继电器(ka1)的线圈使常开触点(3/5)吸合,车载微机(plc1)43的输入端子(x1)导通,车载微机(plc1)43的输出端子(y5)断开(y4)导通,车门电机(m4)60立即反转开门,当手动开门按钮(sb5)弹起,或者光栅传感器(sq1)24没有检测到门口障碍物时,继电器(ka1)和车载微机(plc1)43及车门电机(m4)60 反向动作,继续进行关门动作,直至开门限位开关26断开;
57.经过并感应第七磁块53,车载微机(plc1)43的输出端子(y3)断开,行走电机(m3)
22以第二段速运行;
58.经过并感应第八磁块54,车载微机(plc1)43的输出端子(y2)断开,行走电机(m3)22以第一段速运行;
59.经过并感应第九磁块55,车载微机(plc1)43的输出端子(y1)断开,行走电机(m3)22以零段速运行;
60.参阅附图5和附图10,当挂合器12运行至脱离器8的尾端11时,尾端 11逐渐从挂合器12的中腔14中退出,挂架4从接口15处上升与插销16位置相对,插销16在弹簧17的作用下向右移动连接挂架4,挂合器12与链条 1挂合,车辆18在链条1的牵引下在站外运行。此时,磁感应传感器(sq)45 经过并感应第十磁块56,车载微机(plc1)43的输出端子(y0)断开,行走电机(m3)22停止运行。随后,磁感应传感器(sq)45经过并感应第十一磁块57,车载微机(plc1)43程序复位。
61.前述的零段速为车辆18在站外的运行速度,第三段速为车辆18在车库 32中的行走速度。驱动电机6、站台电机33和行走电机22的启动与停止同步,加速时间与减速时间相同,站台31转动的角速度与车辆18在车库内32 行走的角速度相同。
62.本实用新型实施例,脱离器8的中段10的半径为5.73米,站台31的外缘半径5.23米,候车室28的外缘半径为2米,上站台车库32和下站台车库 32各布置25台车辆18,车辆18的间距为1.2米,每3秒发车一台。车辆18 的运行速度设置为零段速1.6米/秒,第一段速1.2米/秒,第二段速0.8 米/秒,第三段速0.4米/秒,加速时间和减速时间均为3秒。即站台31运行角速度为4度/秒,站台31的外缘的运行线速度为0.37米/秒,站台31的内缘的运行线速度为0.14米/秒,乘车人员从候车室28进入站台31的内缘只需克服0.14米/秒的相对速差,站台31与车辆18运行的角速度均为4度/ 秒而相对静止,方便乘车人员上车和下车。
63.当出现紧急情况时,工作人中员按下控制台42的按钮开关(停止sb4),乘客按下操作台27的按钮开关(停车sb6),或者驱动变频器(vdf)41或者车载变频器(vdf1)44出现故障时,或者车载雷达(rsm)46检测到车辆 18之间小于安全距离时,中心微机(plc)40的安全回路均会断开,实现系统紧急停车。系统停止运行后,乘客可以及时走下所述地面59,从所述疏散通道58安全撤离。
64.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本实用新型的专利保护范围。因此,基于本实用新型的创新理念,对本文所述实施例进行的变更和修改,或利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均在本实用新型专利的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1