一种车车通信故障下虚拟连挂列车降级运行的控制方法
1.本发明涉及交通运输技术领域,特别是一种车车通信故障下虚拟连挂列车降级运行的控制方法。
背景技术:
2.虚拟连挂技术是指多辆列车之间不依靠物理连接,而是通过车车通信的无线通信连接方式实现多辆列车以相同速度、极小间隔运行的列车群体协同运行方式。虚拟连挂列车所辖的单列车之间通常采用的撞软墙的安全防护模式运行,较撞硬墙的安全防护模式能有效缩小列车运行追踪间隔,大幅提升轨道交通的运输效率,尤其适用于目前运输能力已经饱和、靠现有技术难以继续提高的繁忙线路。
3.现有技术中,虚拟连挂列车的各个单列车之间通过前后相邻两车的车与车直接通信的方式运行,以便提高通信效率,缩短各个运行的单列车之间的间隔距离,提高运行效率。现有技术中,如果一旦虚拟连挂列车的单列车间通信出现故障,单列车之间的通信难以得到绝对保证时,为了避免造成列车追尾的重大事故,虚拟连挂高速列车将全部紧急停车。此时,通常采用应急救援列车对通信故障列车进行硬连挂的方式来牵引故障列车使其下线。
4.以上述方式存在以下几个问题:从救援列车的人工组织,到救援列车缓慢行驶到故障列车位置,需要一个较长时间,会造成调度时刻表的大幅度调整、大面积的乘客晚点,不仅影响故障列车的乘客,也影响到其它列车的乘客准点到达目的地,而且还会影响到同一运行线路的其它虚拟连挂高速列车的正常运行,整个线路的列车运行效率受到严重影响;如果故障列车处于列车群的中间位置,还需要利用附近的道岔来调整列车群的位置,以便于救援车靠近故障列车进行硬连挂,进一步降低救援效率;救援列车本身也会增加整个线路的购置成本。
技术实现要素:
5.针对背景技术的问题,本发明提供一种车车通信故障下虚拟连挂列车降级运行的控制方法,以解决现有技术中虚拟连挂列车发生车车通信故障时,救援和线路恢复效率低、成本高的问题。
6.为实现本发明的目的,本发明提供了一种车车通信故障下虚拟连挂列车降级运行的控制方法,所述虚拟连挂列车由多个单列车进行编组按虚拟连挂的控制模式运行,将虚拟连挂列车中行驶于最前方的单列车记为首车,将虚拟连挂列车中行驶于首车后方的单列车记为追踪车,其创新点在于:所述单列车上设置有车载主控模块、车载ato模块、车载atp模块、车车通信模块和车地通信模块,所述车载ato模块、车载atp模块、车车通信模块和车地通信模块四者均与车载主控模块连接;所述控制方法还包括地面中心控制模块和地面通信模块,所述地面通信模块与地面中心控制模块连接,各个单列车的车地通信模块均与地面通信模块无线通信连接,每相邻的两个单列车之间通过各自的车车通信模块无线通信连
接;
7.所述车载atp模块能对列车运行进行安全防护,车载atp模块的防护模式包括撞软墙的防护模式和撞硬墙的防护模式,车载atp模块能在所述的两种防护模式间进行切换并选择其中一种防护模式对列车运行进行安全防护;所述车载atp模块能实时获取对应单列车的运行信息,并将所述运行信息依次通过对应的车载主控模块和车地通信模块发送给地面通信模块;地面通信模块能实时将收到的各个单列车的运行信息传输给地面中心控制模块;所述运行信息包括位置信息和速度信息;
8.所述控制方法包括:
9.虚拟连挂列车正常行驶时,所述首车的车载atp模块采用撞硬墙的防护模式,各个所述追踪车的车载atp模块3均采用撞软墙的防护模式;当其中某两个相邻的单列车之间出现车车通信故障时,按以下方式进行控制:
10.将出现通信故障的两个单列车中行驶在前的单列车记为故障前车,将出现通信故障的两个单列车中行驶在后的单列车记为故障后车;
11.一)所述故障后车的车载主控模块生成通信故障信息,然后故障后车的车载主控模块通过对应的车地通信模块将通信故障信息发送给所述地面通信模块,然后地面通信模块将收到的通信故障信息传输给地面中心控制模块;
12.二)地面中心控制模块收到通信故障信息后即生成制动减速指令,然后地面中心控制模块将所述制动减速指令依次通过地面通信模块、故障后车的车地通信模块、故障后车的车载主控模块传送给故障后车的车载atp模块,故障后车的车载atp模块根据收到的制动减速指令控制故障后车制动减速,直到故障后车的车头与故障前车的车尾之间的距离为车距d;
13.三)地面中心控制模块生成防护模式切换指令和自主驾驶指令,然后地面中心控制模块将所述防护模式切换指令和自主驾驶指令二者依次通过地面通信模块和故障后车的车地通信模块传送给故障后车的车载主控模块;
14.四)故障后车的车载主控模块收到自主驾驶指令后生成临时自动驾驶曲线,然后将临时自动驾驶曲线加载到故障后车的车载ato模块,故障后车的车载ato模块根据临时自动驾驶曲线控制故障后车行驶;
15.同时,故障后车的车载主控模块将防护模式切换指令传送给故障后车的车载atp模块,然后故障后车的车载atp模块将防护模式从撞软墙的防护模式切换为撞硬墙的防护模式;
16.所述车距d根据以下公式获取;
17.d=d
break
+s
safe
18.其中,所述d
break
为根据故障后车开始制动减速时的行驶速度下采用最小制动力矩制动而计算得到的最大制动距离;所述s
safe
为安全距离,s
safe
为设定值。
19.作为优化,所述步骤四)中,故障后车的车载主控模块采用深度学习模型生成临时自动驾驶曲线。
20.本发明的原理如下:
21.高速运行的列车为了保证运行安全,各个单列车都配置了车载atp(列车自动防护automatic train protection)模块以保证车与车之间的安全行驶距离。现有技术中,列车
之间的追踪安全防护模式有两种,即撞硬墙和撞软墙的防护模式。
22.在撞硬墙的防护模式中,两个列车间的运行最小间距d
硬
根据以下公式确定:
23.d
硬
=d
后break
+s
safe
24.其中,d
后break
为后车(追踪车)在当前行驶速度下采用最小制动力矩制动得到的制动距离,s
safe
为根据安全规范要求设定的安全保障距离。可见,所谓撞硬墙的防护模式是假设前车的车尾瞬时静止,后车制动停止后,后车的车头还能与前车的车尾至少保证有s
safe
的安全距离。
25.而在撞软墙的防护模式中,两个列车间的运行最小间距d
软
根据以下公式确定:
26.d
软
=d
后break-d
前break
+s
safe
27.其中,d
前break
为前车在当前行驶速度下采用最大制动力矩制动的制动距离,d
后break
和s
safe
与硬撞墙公式的含义相同。可见,所谓撞软墙的防护模式是假定前车和后车同时制动到都停止后,后车的车头还能与前车的车尾至少保证有s
safe
的安全距离。
28.对比上述两个公式可看出,同样的两列车分别采用两种防护模式的情况下,d
软
较d
硬
更小,也即撞软墙较撞硬墙的防护模式,两列车之间的运行间距更小,运行效率更高,而硬撞墙的防护模式效率虽然较低,但安全性更好。因此,现有技术中心,虚拟连挂列车为了提高运行效率,各个单列车之间通常采用撞软墙的防护模式保障虚拟连挂列车内部的安全运行,而对于高速行驶的列车群来说,为了在实现撞软墙的防护模式,就需要各个单列车之间的数据交换能保证实时、精准和高效。现有技术中,是通过车车通信的方式来实现的,即相邻的前后两列车通过车车通信模块实现运行信息(位置信息和速度信息)的交换。
29.由此可见,虚拟连挂列车的单列车之间之所以能以撞软墙这种安全防护模式以极小间距高效运行,正是依赖车车通信这种通信方式,一旦两个单列车之间的车车通信出现故障,为了保证运行安全,现有技术中,只能采取整个虚拟连挂列车群紧急制动停车,等待救援的方式解决,不仅故障排除效率低,还会影响全线路的其他列车运行,降低整条线路的运行效率,且救援成本高。
30.本技术的发明构思是:当虚拟连挂列车内部出现车车通信故障时,我们是通过将以下三种方式重新构建与结合来实现的,这三种方式与步骤环环相扣,缺一不可:其一,对通信方式进行降级调整,将车车通信降级为车地通信方式;其二,改变列车之间atp防护模式,将撞软墙防护模式切换至撞硬墙防护模式;其三,改变故障后车的运行模式,将其由追踪运行方式变为临时自动驾驶ato控制方式。通过对以上三种方式的重构及结合,形成了一套完整的通信故障应对方案,能够在不停车的情况下快速排除故障,在保证安全的前提下,实现虚拟连挂列车的持续不间断运行。具体来说:
31.当某两个相邻的单列车之间出现通信故障,无法进行车车通信时,立即通过降级的车地通信方式对故障后车发出制动指令,直到其与前车的车尾距离满足撞硬墙的间距d,然后对故障后车的车载atp模块发出指令,使其安全防护模式从软撞墙的防护模式切换为硬撞墙的防护模式,实际上,上述控制过程将原虚拟连挂列车转换成了两个虚拟连挂列车群,故障后车之前的列车群仍然保持原虚拟连挂的控制方式运行,故障后车及其之后的单列车组成新的列车群以虚拟连挂的控制方式运行,而两个列车群之间通过车地通信的方式以硬撞墙的防护模式保证安全运行。
32.另一方面,由于故障后车成为新的列车群的首车,所以需要为其生成自动驾驶曲
线加载到其车载ato模块上,以控制故障后车及其后方的单列车完成剩下路段的正常行驶。本技术中,自动驾驶曲线既可以采用现有技术中的遗传、差分进化和粒子集群等智能算法获取,也可以采用深度学习等机器学习的方法获取,但由于智能算法需要不断进行进化计算和迭代,搜索时间较长,效率较低,会影响列车群的故障排除和恢复运行效率,所以作为优化,本技术采用深度学习的方法来进行故障后车自动驾驶曲线的生成,深度学习模型具备对线路和列车基本数据的实时处理能力,能通过训练后的深度学习模型,实时生成列车的自动驾驶曲线用于列车的ato自动驾驶,具有实时、高效的特点,能极大提高整个列车群的控制模式转换效率。
33.由此可见,本发明具有如下的有益效果:采用本发明所述的控制方法,间接地恢复了故障车的车车通信功能,能够在列出群运动过程中快速、高效解决虚拟连挂列车出现车车通信故障的问题,并极大提高了列车群运行安全性,降低了对运营线路正常运营的影响,同时降低了故障恢复的成本。
附图说明
34.本发明的附图说明如下。
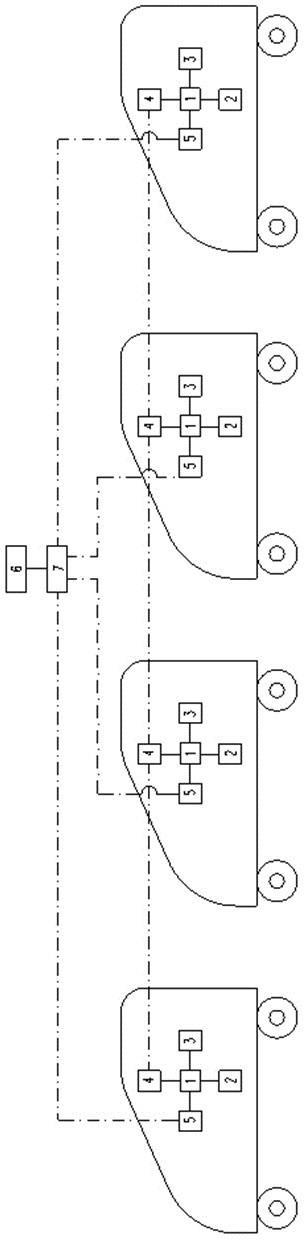
35.附图1本发明所涉及硬件的连接示意图。
36.图中:1、车载主控模块;2、车载ato模块;3、车载atp模块;4、车车通信模块;5、车地通信模块;6、地面中心控制模块;7、地面通信模块。
具体实施方式
37.下面结合实施例对本发明作进一步说明。
38.如附图1所示的虚拟连挂列车由多个单列车进行编组按虚拟连挂的控制模式运行,将虚拟连挂列车中行驶于最前方的单列车记为首车,将虚拟连挂列车中行驶于首车后方的单列车记为追踪车,所述单列车上设置有车载主控模块1、车载ato(列车自动运行automatic train operation)模块2、车载atp模块3、车车通信模块4和车地通信模块5,所述车载ato模块2、车载atp模块3、车车通信模块4和车地通信模块5四者均与车载主控模块1连接;所述控制方法还包括地面中心控制模块6和地面通信模块7,所述地面通信模块7与地面中心控制模块6连接,各个单列车的车地通信模块5均与地面通信模块7无线通信连接,每相邻的两个单列车之间通过各自的车车通信模块4无线通信连接;
39.所述车载atp模块3能对列车运行进行安全防护,车载atp模块3的防护模式包括撞软墙的防护模式和撞硬墙的防护模式,车载atp模块3能在所述的两种防护模式间进行切换并选择其中一种防护模式对列车运行进行安全防护;所述车载atp模块3能实时获取对应单列车的运行信息,并将所述运行信息依次通过对应的车载主控模块1和车地通信模块5发送给地面通信模块7;地面通信模块7能实时将收到的各个单列车的运行信息传输给地面中心控制模块6;所述运行信息包括位置信息和速度信息;
40.所述控制方法包括:
41.虚拟连挂列车正常行驶时,所述首车的车载atp模块3采用撞硬墙的防护模式(主要是保证虚拟连挂列车与线路上其他虚拟连挂列车或其他单列车的安全距离),各个所述追踪车的车载atp模块3均采用撞软墙的防护模式;当其中某两个相邻的单列车之间出现车
车通信故障时,按以下方式进行控制:
42.将出现通信故障的两个单列车中行驶在前的单列车记为故障前车,将出现通信故障的两个单列车中行驶在后的单列车记为故障后车;
43.一)所述故障后车的车载主控模块1生成通信故障信息,然后故障后车的车载主控模块1通过对应的车地通信模块5将通信故障信息发送给所述地面通信模块7,然后地面通信模块7将收到的通信故障信息传输给地面中心控制模块6;
44.二)地面中心控制模块6收到通信故障信息后即生成制动减速指令,然后地面中心控制模块6将所述制动减速指令依次通过地面通信模块7、故障后车的车地通信模块5、故障后车的车载主控模块1传送给故障后车的车载atp模块3,故障后车的车载atp模块3根据收到的制动减速指令控制故障后车制动减速,直到故障后车的车头与故障前车的车尾之间的距离为车距d;
45.三)地面中心控制模块6生成防护模式切换指令和自主驾驶指令,然后地面中心控制模块6将所述防护模式切换指令和自主驾驶指令二者依次通过地面通信模块7和故障后车的车地通信模块5传送给故障后车的车载主控模块1;
46.四)故障后车的车载主控模块1收到自主驾驶指令后生成临时自动驾驶曲线,本技术中,临时自动驾驶曲线的生成方法可采用现有技术的方法(如智能算法、深度学习模型等),然后将临时自动驾驶曲线加载到故障后车的车载ato模块2,故障后车的车载ato模块2根据临时自动驾驶曲线控制故障后车行驶;
47.同时,故障后车的车载主控模块1将防护模式切换指令传送给故障后车的车载atp模块3,然后故障后车的车载atp模块3将防护模式从撞软墙的防护模式切换为撞硬墙的防护模式;
48.所述车距d根据以下公式获取;
49.d=d
break
+s
safe
50.其中,所述d
break
为根据故障后车开始制动减速时的行驶速度下采用最小制动力矩制动而计算得到的制动距离,即最大制动距离;所述s
safe
为安全距离,s
safe
为设定值。
51.为了进一步提高故障排除和线路恢复的效率,所述步骤四)中,故障后车的车载主控模块1采用深度学习模型生成临时自动驾驶曲线。其中,可提前用深度神经网络构建深度机器学习模型,从大量驾驶员信息中筛选出有用的驾驶信息,数据样本收集通过如下方式进行:线路数据可从设计资料或列车运行监控装置lkj中获取;列车日志数据包括列车基本参数和运行数据,可通过设计资料或从列车控制与管理系统tcms设备上获得。用收集到的驾驶数据,将线路、列车基础数据和调度数据作为输入,将列车驾驶档位操纵作为输出,对深度神经网络模型进行训练,并利用损失函数对训练后的深度学习模型进行评估,在满足设定差要求后,将其记为可用深度学习模型。将该深度学习模型装载至故障后车的车载主控模块1备用。
52.本发明中应用到的深度学习模型、的遗传、差分进化和粒子集群等智能算法等理论均为现有技术中十分常见的处理手段或计算方法,相关的内容,本领域技术人员可从现有技术的相关文献中获取。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1