智能单轨吊的无线信号传输系统的制作方法
1.本发明涉及一种传输系统,具体是一种智能单轨吊的无线信号传输系统。
背景技术:
2.单轨吊车是一种机动性强、运行速度快、载重量大、安全可靠的行驶于悬吊单轨系统的辅助运输设备,主要用于煤矿综采工作面安装、回撤。单轨吊是用一条吊挂在巷道上空的特制工字钢作轨道,由具有各种功能的吊挂车辆连成车组,用牵引设备牵引,沿轨道运行的系统。其牵引动力可由钢丝绳、柴油机、蓄电池或风动装置提供。
3.而单轨吊智能驾驶系统是基于4g/5g或者wifi无线通信网络,实现井下单轨吊机车的精准定位、安全探测、信号灯闭锁、道岔联锁、语音广播、视频监测、数据监测、防掉道预警并自动停车等核心功能,最终实现井下单轨吊的无人驾驶要求,满足减员提效、提高井下安全的目标,从而提供一种稳定高效高效的无线信号传输系统,是实现单轨吊的无人驾驶稳定运行的最基本要求之一,而传统的地面无线通讯通过单一的接发器进行无线通讯,在复杂的矿井巷道工况下使用时,容易出现信号中断,从而影响单轨吊无人驾驶地稳定运行。
4.因此,有必要提供一种新的智能单轨吊的无线信号传输系统解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本发明提供一种无线信号传输稳定、实时监测单轨吊行驶环境,单轨吊井下行驶安全性高的智能单轨吊的无线信号传输系统。
6.本发明提供的智能单轨吊的无线信号传输系统包括:布置于矿下巷道的工字钢轨道,以及悬挂于所述工字钢轨道上的智能吊车,所述智能吊车上安装有第一信号传输器;第二信号传输器,与所述第一信号传输器进行无线通讯的所述第二信号传输器布置于矿井地面控制室内;视频传输模块,安装于所述智能吊车上,并通过线缆与第一信号传输器电性连接;中继无线网桥装置,若干个所述中继无线网桥装置均匀等间隔安装于所述工字钢轨道上,且所述中继无线网桥装置包括安装壳体、无线网桥器、微型控制器和行车检测组件,所述安装壳体固定安装于工字钢轨道上表面,且安装壳体上嵌装有无线网桥器,所述无线网桥器与第一信号传输器和第二信号传输器均通过无线通讯连接,且所述安装壳体内安装有检测智能吊车行车位置点的行车检测组件,用于接收行车检测组件的反馈信号控制无线网桥器启停的所述微型控制器固定安装于无线网桥器壳体外表面,且所述微型控制器与无线网桥器和行车检测组件均通过线缆电性连接。
7.优选的,所述智能吊车包括车架,所述车架顶端通过悬挂轮架悬挂于所述工字钢轨道上,且所述车架后方固定安装有驱动车架在工字钢轨道上移动的驱动机构,车架内安装有中控台,所述中控台与第一信号传输器电性连接。
8.优选的,所述悬挂轮架的顶端固定安装有与行车检测组件接触配合的滚轮。
9.优选的,所述行车检测组件包括弹簧座、检测杆、复位弹簧、固定板、导杆和干簧
管,所述弹簧座滑动安装于安装壳体开设的通孔中,且所述弹簧座朝向安装壳体外部的一端固定安装有检测杆,弹簧座朝向安装壳体内部的一端固定安装有复位弹簧,所述复位弹簧背离弹簧座的一端固定安装有固定板,所述固定板嵌装于安装壳体开设的通孔中,所述弹簧座内位于复位弹簧的中部固定安装有导杆,所述导杆的顶端穿过固定板开设的通孔固定安装有永磁块,所述干簧管嵌装于安装壳体开设的通孔内,并位于所述永磁块的正上方,且所述干簧管通过线缆与微型控制器电性连接。
10.优选的,所述检测杆的顶端穿过工字钢轨道开设的通孔与滚轮接触配合。
11.优选的,所述行车检测组件还包括传感件,所述传感件嵌装于安装壳体的外侧壁上,并与微型控制器电性连接。
12.优选的,所述传感件包括但不限于位置传感器、温湿度传感器、振动传感器、一氧化碳传感器、二氧化氮传感器、氧气传感器和可燃气体检测仪的一种或多种。
13.优选的,所述智能吊车通过行车检测组件检测到经过中继无线网桥装置的次数为奇数时,微型控制器控制无线网桥器开启,检测到经过中继无线网桥装置的次数为偶数时,微型控制器控制无线网桥器关闭。
14.优选的,所述视频传输模块包括布置于智能吊车前后两端的无线监控摄像头。
15.优选的,若干个所述中继无线网桥装置中的微型控制器均通过线缆与外置电源连通。
16.与相关技术相比较,本发明提供的智能单轨吊的无线信号传输系统具有如下有益效果:1、本发明提供智能单轨吊的无线信号传输系统,通过在工字钢轨道上等间隔设置中继无线网桥装置,中继无线网桥装置利用无线网桥器、微型控制器、行车检测组件、弹簧座、检测杆、复位弹簧、固定板、导杆、永磁块、干簧管与滚轮的接触配合使其在智能吊车经过中继无线网桥后,向井下移动时,开设无线网桥器,对第一信号传输器与第二信号传输器之间无线通讯的信号进行加强传递,在智能吊车经过中继无线网桥后,向井上移动时,自动关闭无线网桥器停止信号传输加强,从而使得在复杂的矿井巷道工况下,无线信号可以稳定传输,从而保证单轨吊无人驾驶地稳定运行;2、行车检测组件还通过设置传感件,利用位置传感器、温湿度传感器、振动传感器、一氧化碳传感器、二氧化氮传感器、氧气传感器和可燃气体检测仪的一种或多种的组合配合,实时对工字钢轨道上设置中继无线网桥装置的环境进行检测,从而在确保行车环境安全的情况下,进行载人运输,提高井下行车的安全性。
附图说明
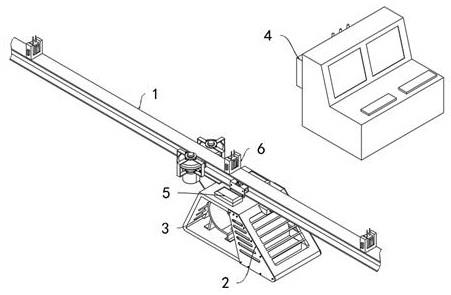
17.图1为本发明提供的智能单轨吊的无线信号传输系统的一种较佳实施例的结构示意图;图2为图1所示的智能吊车的结构示意图;图3为图1所示的中继无线网桥装置的结构示意图;图4为图3所示的安装壳体内部局部剖视的结构示意图;图中标号:1、工字钢轨道;2、智能吊车;21、车架;22、悬挂轮架;23、驱动机构;24、中控台;25、滚轮;3、第一信号传输器;4、第二信号传输器;5、视频传输模块;6、中继无线网
桥装置;61、安装壳体;62、无线网桥器;63、微型控制器;64、行车检测组件;641、弹簧座;642、检测杆;643、复位弹簧;644、固定板;645、导杆;6451、永磁块;646、干簧管;647、传感件。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
19.以下结合具体实施例对本发明的具体实现进行详细描述。
20.请参阅图1至图4,本发明实施例提供的智能单轨吊的无线信号传输系统,所述智能单轨吊的无线信号传输系统包括:工字钢轨道1、智能吊车2、第一信号传输器3、第二信号传输器4、视频传输模块5和中继无线网桥装置6工字钢轨道1布置于矿下巷道上,智能吊车2悬挂于所述工字钢轨道1,且智能吊车2上安装有第一信号传输器3,与所述第一信号传输器3进行无线通讯的所述第二信号传输器4布置于矿井地面控制室内;视频传输模块5,安装于所述智能吊车2上,并通过线缆与第一信号传输器3电性连接,且所述视频传输模块5包括布置于智能吊车2前后两端的无线监控摄像头;若干个所述中继无线网桥装置6均匀等间隔安装于所述工字钢轨道1上,且所述中继无线网桥装置6包括安装壳体61、无线网桥器62、微型控制器63和行车检测组件64,所述安装壳体61固定安装于工字钢轨道1上表面,且安装壳体61上嵌装有无线网桥器62,所述无线网桥器62与第一信号传输器3和第二信号传输器4均通过无线通讯连接,且所述安装壳体61内安装有检测智能吊车2行车位置点的行车检测组件64,用于接收行车检测组件64的反馈信号控制无线网桥器62启停的所述微型控制器63固定安装于无线网桥器62壳体外表面,且所述微型控制器63与无线网桥器62和行车检测组件64均通过线缆电性连接,若干个所述中继无线网桥装置6中的微型控制器63均通过线缆与外置电源连通。
21.其中,所述智能吊车2通过行车检测组件64检测到经过中继无线网桥装置6的次数为奇数时,微型控制器63控制无线网桥器62开启,检测到经过中继无线网桥装置6的次数为偶数时,微型控制器63控制无线网桥器62关闭。
22.需要说明的是:智能吊车2行驶时,控制智能吊车2行驶的信号通过第一信号传输器3与第二信号传输器4之间利用4g/5g或者wifi无线通信网络实现通讯传输,然后通过地面控制室实现控制智能吊车2无人驾驶,然后传输过程中,智能吊车2利用视频传输模块5布置于智能吊车2前后两端的无线监控摄像头对智能吊车2的行车环境拍摄,从而确定行车位置,然后往井下行驶时经过中继无线网桥装置6时,行车检测组件64检测到智能吊车2的行车位置,然后反馈给微型控制器63,微型控制器63控制无线网桥器62启动,对第一信号传输器3与第二信号传输器4之间无线通讯的信号进行加强传递,一路行驶至井下需要停止的位置,然后返程时,当智能吊车2经过中继无线网桥装置6后,自动关闭无线网桥器62停止信号传输加强,从而使得在复杂的矿井巷道工况下,无线信号可以稳定传输,从而保证单轨吊无人驾驶地稳定运行。
23.在本发明的实施例中,请参阅图1和图2,其中,智能吊车2包括车架21,所述车架21
顶端通过悬挂轮架22悬挂于所述工字钢轨道1上,且所述车架21后方固定安装有驱动车架21在工字钢轨道1上移动的驱动机构23,车架21内安装有中控台24,所述中控台24与第一信号传输器3电性连接。
24.需要说明的是:这里智能吊车2为现有技术常用的悬挂吊车,其通过中控台24利用第一信号传输器3接受第二信号传输器4的指令,从而控制驱动机构23驱动智能吊车2前进或后退,这里驱动机构23由柴油机、蓄电池或风动装置提供动力,从而驱动智能吊车2沿着工字钢轨道1移动,具体结构均有现有装置,就不多加叙述。
25.而本在实施例中:所述悬挂轮架22的顶端固定安装有与行车检测组件64接触配合的滚轮25,这样智能吊车2在工字钢轨道1上行驶时,在经过中继无线网桥装置6时,利用滚轮25与行车检测组件64配合,从而实时检测智能吊车2的行车位置,从而根据行车位置开启相应的无线网桥器62。
26.在本发明的实施例中,请参阅图1、图3和图4,所述行车检测组件64包括弹簧座641、检测杆642、复位弹簧643、固定板644、导杆645和干簧管646,所述弹簧座641滑动安装于安装壳体61开设的通孔中,且所述弹簧座641朝向安装壳体61外部的一端固定安装有检测杆642,弹簧座641朝向安装壳体61内部的一端固定安装有复位弹簧643,所述复位弹簧643背离弹簧座641的一端固定安装有固定板644,所述固定板644嵌装于安装壳体61开设的通孔中,所述弹簧座641内位于复位弹簧643的中部固定安装有导杆645,所述导杆645的顶端穿过固定板644开设的通孔固定安装有永磁块6451,所述干簧管646嵌装于安装壳体61开设的通孔内,并位于所述永磁块6451的正上方,且所述干簧管646通过线缆与微型控制器63电性连接。
27.其中,所述检测杆642的顶端穿过工字钢轨道1开设的通孔与滚轮25接触配合。
28.需要说明的是:行车检测组件64使用时,当智能吊车2行驶至中继无线网桥装置6时,滚轮25沿着工字钢轨道1内部顶端滚动时,滚轮25在接触到检测杆642底端时,挤压检测杆642向上推动,检测杆642同步推动弹簧座641带动导杆645向上移动,从而驱动永磁块6451靠近干簧管646,永磁块6451靠近干簧管646时,干簧管646的两个磁触角相互靠近直至接触,接触时,将信号传输至微型控制器63中,微型控制器63根据干簧管646的两个磁触角相互接触的奇偶次数,来控制无线网桥器62的启停,同时通过干簧管646的接触状态,来进一步确定智能吊车2的行车位置,当滚轮25从检测杆642滚动离开时,弹簧座641在复位弹簧643的作用下带动检测杆642自动复位,便于下一次接触检测。
29.在本发明的实施例中,请参阅图3和图4,所述行车检测组件64还包括传感件647,所述传感件647嵌装于安装壳体61的外侧壁上,并与微型控制器63电性连接。
30.其中,所述传感件647包括但不限于位置传感器、温湿度传感器、振动传感器、一氧化碳传感器、二氧化氮传感器、氧气传感器和可燃气体检测仪的一种或多种。
31.需要说明的是:这样若干个中继无线网桥装置6通过位置传感器、温湿度传感器、振动传感器、一氧化碳传感器、二氧化氮传感器、氧气传感器和可燃气体检测仪的一种或多种的配合,实时对工字钢轨道1的周围环境进行检测,从而在确保行车环境安全的情况下,进行载人运输,提高井下行车的安全性。
32.本发明提供的智能单轨吊的无线信号传输系统的工作原理如下:智能吊车2行驶时,控制智能吊车2行驶的信号通过第一信号传输器3与第二信号
传输器4之间利用4g/5g或者wifi无线通信网络实现通讯传输,然后通过地面控制室实现控制智能吊车2无人驾驶,然后传输过程中,智能吊车2利用视频传输模块5布置于智能吊车2前后两端的无线监控摄像头对智能吊车2的行车环境拍摄,从而确定行车位置,然后往井下行驶时经过中继无线网桥装置6时,行车检测组件64检测到智能吊车2的行车位置,然后反馈给微型控制器63,微型控制器63控制无线网桥器62启动,对第一信号传输器3与第二信号传输器4之间无线通讯的信号进行加强传递,一路行驶至井下需要停止的位置,然后返程时,当智能吊车2经过中继无线网桥装置6后,自动关闭无线网桥器62停止信号传输加强,从而使得在复杂的矿井巷道工况下,无线信号可以稳定传输,从而保证单轨吊无人驾驶地稳定运行;具体地,行车检测组件64使用时,当智能吊车2行驶至中继无线网桥装置6时,滚轮25沿着工字钢轨道1内部顶端滚动时,滚轮25在接触到检测杆642底端时,挤压检测杆642向上推动,检测杆642同步推动弹簧座641带动导杆645向上移动,从而驱动永磁块6451靠近干簧管646,永磁块6451靠近干簧管646时,干簧管646的两个磁触角相互靠近直至接触,接触时,将信号传输至微型控制器63中,微型控制器63根据干簧管646的两个磁触角相互接触的奇偶次数,来控制无线网桥器62的启停,同时通过干簧管646的接触状态,来进一步确定智能吊车2的行车位置,当滚轮25从检测杆642滚动离开时,弹簧座641在复位弹簧643的作用下带动检测杆642自动复位,便于下一次接触检测,进一步行车检测组件64通过位置传感器、温湿度传感器、振动传感器、一氧化碳传感器、二氧化氮传感器、氧气传感器和可燃气体检测仪的一种或多种的配合,实时对工字钢轨道1的周围环境进行检测,从而在确保行车环境安全的情况下,进行载人运输,提高井下行车的安全性。
33.本发明中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
34.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1