一种井下有轨运输无人驾驶方法、系统及终端与流程
本技术涉及矿山井下运输的,尤其是涉及一种井下有轨运输无人驾驶方法、系统及终端。
背景技术:
1、矿山井下平面运输主要采用电机车为挂钩连接底侧卸矿车在井下平巷完成往复单向循环运输。
2、目前公开号为cn102700569a,公开日为2012-10-03的专利公开了基于图像处理的矿用电机车行人监测方法及报警系统,所述系统包括视频采集模块、图像处理模块和声光报警模块;所述视频采集模块用红外摄像仪对电机车前方的图像进行采集;所述图像处理模块包括图像预处理、铁轨的识别和拟合、行人的识别;所述声光报警模块包括声光报警器和控制电路。所述图像预处理采用基于遗传算法和归一化非完全beta函数结合的图像自适应校正和基于脉冲耦合神经网络的图像的二值化方法;所述铁轨的识别和拟合采用基于遗传算法阈值改进的模糊边缘检测快速算法对铁轨进行识别和启发式连接法对铁轨进行拟合;所述行人的识别采用基于fpga实现的脉冲耦合神经网络图像二值化方法检测轨道上运动的行人。
3、虽然电机车可以通过采集行驶方向的图像信息,判断行驶前方是否有人,并在有人时进行报警,即无论行人距离电机车距离如何,只要检测到有人就进行报警;而行人也无法通过报警知晓电机车与自身之间是远还是近,从而有可能造成躲避不及时的情况发生,安全性有待提高。
技术实现思路
1、为了能够使得工作人员及时知晓电机车距离自身的远近,进一步提高巷道的安全性,本技术提供一种井下有轨运输无人驾驶方法、系统及终端。
2、第一方面,本技术提供的一种井下有轨运输无人驾驶方法,采用如下技术方案:
3、一种井下有轨运输无人驾驶方法,包括:
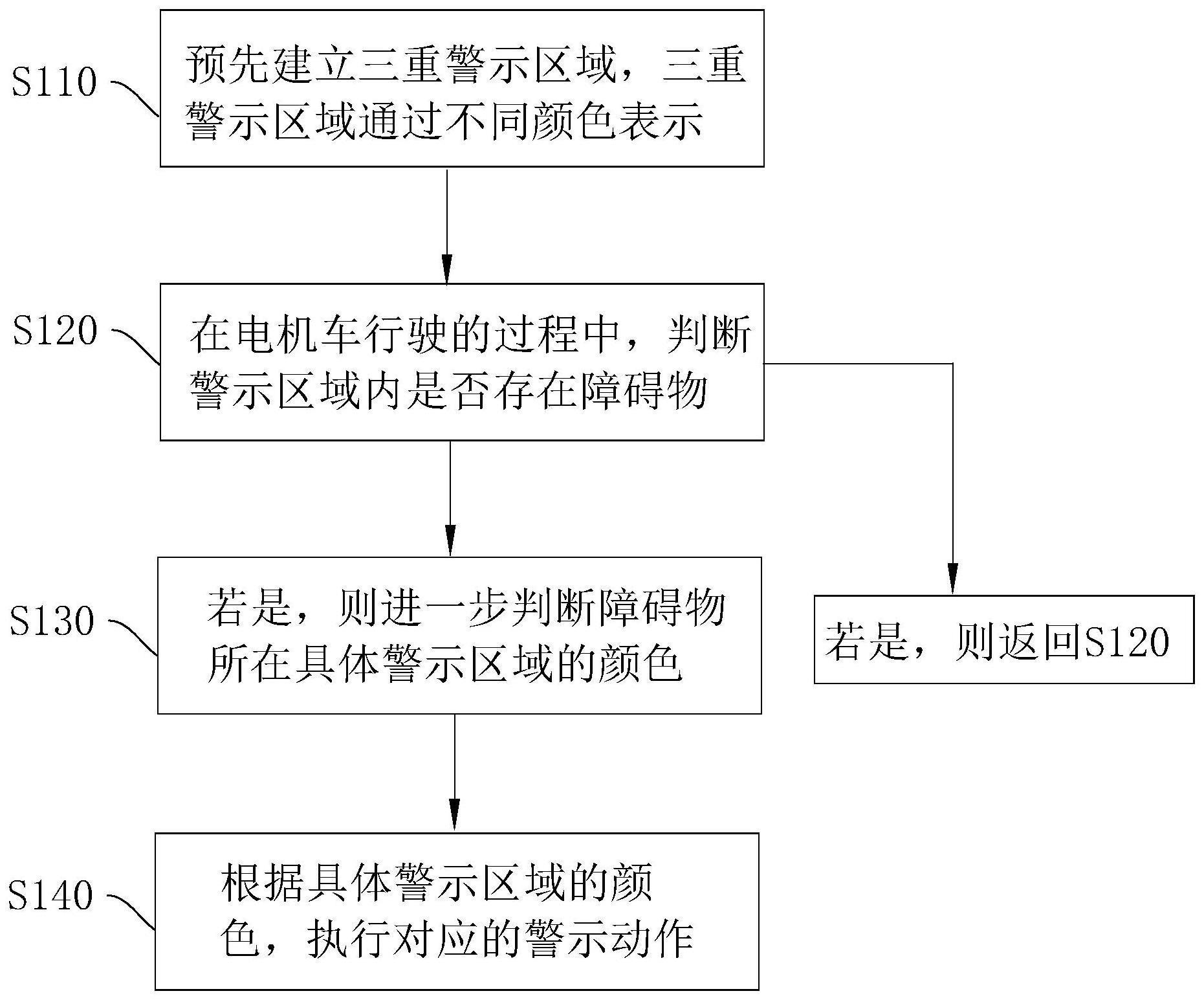
4、预先建立三重警示区域,所述三重警示区域通过不同颜色表示;
5、在电机车行驶的过程中,判断警示区域内是否存在障碍物,所述障碍物包括人员和/或其他物体;
6、若是,则进一步判断障碍物所在具体警示区域的颜色;
7、根据所述具体警示区域的颜色,执行对应的警示动作,每重所述警示区域与所述警示动作为唯一映射关系。
8、通过采用上述技术方案,通过建立三重警示区域,从而使得工作人员出现在不同警示区域时,可以执行对应的警示动作,工作人员可以根据警示动作大致判断电机车距离自身的远近情况,从而进行及时的躲避,因此进一步提高了巷道的安全性。
9、可选的,所述判断警示区域内是否存在障碍物的具体步骤包括:
10、判断是否获取到测距标签的标签信息,所述测距标签由人员携带、由其他物体粘贴,电机车上预先安装有测距基站;
11、若是,则确定警示区域内存在障碍物;
12、所述进一步判断障碍物所在具体警示区域的颜色的具体步骤包括:
13、根据所述标签信息,确定障碍物至电机车的距离;
14、基于所述距离,确定障碍物落入的警示区域颜色。
15、可选的,所述无人驾驶方法还包括:
16、获取电机车的位置信息;
17、基于所述位置信息和预先规划的行驶路线,控制最近的电动岔道机运行和扳道。
18、通过采用上述技术方案,在获取到位置信息后,若是电机车临近处存在电动岔道机,而根据电机车的行驶路线,需要电动岔道机运行,则控制距离电机车最近的电动岔道机运行和扳道。
19、可选的,所述获取电机车的位置信息的具体步骤包括:
20、基于预先布设于巷道中的无线基站,获取电机车的范围位置信息;
21、基于预先安装于电机车从动轮上的光电轴编码器,获取电机车的行驶距离;
22、判断是否读取到射频rf卡的编号信息,其中,巷道预先分区分段设置,所述射频rf卡预先布置于巷道每段岔口处的,电机车上安装有射频读卡器;
23、若是,则基于所述编号信息和所述行驶距离,确定电机车所在的精确位置信息;
24、将所述精确位置信息和所述范围位置信息进行模糊匹配;
25、若两者匹配,则确定所述精确位置信息为实际位置信息。
26、通过采用上述技术方案,无线基站能够对电机车进行大概定位;若是射频读卡器读取到射频rf卡的编号信息,则根据行驶距离以及编号信息,确定电机车的精确位置信息,若是仅依靠编号信息,则有可能存在误差;而后在将精确位置信息和范围位置信息进行模糊匹配,进一步判断精确位置信息是否在范围位置处,从而进一步排除误差,从而能够实现对电机车的精确定位。
27、可选的,所述无人驾驶方法还包括:
28、基于所述电机车的位置信息和巷道地图像素,在所述巷道地图中生成电机车的画面位置;
29、显示所述画面位置于所述巷道地图中。
30、通过采用上述技术方案,可以便于监控人员对巷道中电机车位置的定位和追踪。
31、可选的,所述基于所述电机车的位置信息和巷道地图像素,在所述巷道地图中生成电机车的画面位置的具体步骤包括:
32、根据所述电机车的位置信息,判断电机车所属区位区段;
33、根据所述区位区段并结合所述巷道地图像素,调用关联的像素计算方式;
34、根据所述像素计算方式,获得x轴像素和y轴像素;
35、基于所述x轴像素和y轴像素,在所述巷道地图中生成电机车的画面位置。
36、可选的,所述像素计算方式包括直线像素计算方式和曲线像素计算方式,所述直线像素计算方式适用于巷道直线段,所述曲线像素计算方式适用于巷道曲线端;
37、所述直线像素计算方式包括:
38、x轴像素为:px= px1+(l-l1)*kx1*j1;
39、其中,px1为电机车在直线段起点的初始像素值;l为电机车运行的实际距离;l1为电机车在直线段起点的初始实际位置值;kx1电机车运行直线的斜率;j1为电机车具体的移动位置与画面像素距离比系数;px即为电机车实时的x轴像素位置;
40、同x轴计算相同,y轴像素为:py= py1+(l-l1)*ky1*j1;
41、所述曲线像素计算方式包括:
42、x轴像素为:
43、px=r*{cos[(l-l1)/l12]* a+b ]-cosb}+px1 ;
44、其中,r为电机车运行曲线对应的画面像素半径;l为电机车运行的实际距离;l1为电机车在直线段起点的初始实际位置值;l12为本段圆弧的长度;a为本段圆弧旋转的角度;b为本段圆弧的起始角度;px1为电机车在直线段起点的初始像素值,px即为电机车实时的x轴像素位置;
45、同x轴计算相同,y轴像素为:
46、py=r*{sin[(l-l1)/l12]* a+b ]-sinb}+py1。
47、通过采用上述技术方案,在直线运行的巷道中,根据电机车的位置起点xy坐标位置和运行距离,依靠斜率系数,计算出电机车在画面中的现行的像素坐标位置。在曲线运行的巷道中,根据电机车的位置起点xy坐标位置和运行距离,依靠巷道电机车行驶的圆弧,计算出电机车在画面中的现行的像素坐标位置。
48、第二方面,本技术提供了一种井下有轨运输无人驾驶系统,采用如下技术方案:
49、一种井下有轨运输无人驾驶系统,包括:
50、警示区域建立模块,用于预先建立三重警示区域,三重警示区域通过不同颜色表示;
51、判断模块,用于在电机车行驶过程中,判断警示区域内是否存在障碍物,所述障碍物包括人员和/或其他物体;若是,则进一步判断障碍物所在具体警示区域的颜色;
52、警示动作执行模块,根据所述具体警示区域的颜色,执行对应的警示动作,每重所述警示区域与所述警示动作为唯一映射关系。
53、通过采用上述技术方案,通过警示区域建立模块建立三重警示区域,从而使得工作人员出现在不同警示区域时,警示动作执行模块可以执行对应的警示动作,工作人员可以根据警示动作大致判断电机车距离自身的远近情况,从而进行及时的躲避,因此进一步提高了巷道的安全性。
54、第三方面,本技术提供了一种终端,采用如下技术方案:
55、一种终端,包括:
56、存储器,用于存储井下有轨运输无人驾驶程序;
57、处理器,用于执行存储器上存储的程序,以实现上述井下有轨运输无人驾驶方法的步骤。
58、第四方面,本技术提供了一种计算机可读存储介质,采用如下技术方案:
59、一种计算机可读存储介质,存储有能够被处理器加载并执行上述井下有轨运输无人驾驶方法的计算机程序。
60、综上所述,本技术存在至少以下有益效果:
61、1、建立三重警示区域,并根据具体警示区域的颜色,执行对应的警示动作的目的是,工作人员可以根据警示动作大致判断电机车距离自身的远近情况,从而进行及时的躲避,因此进一步提高了巷道的安全性。
62、2、基于电机车的位置信息和巷道地图像素,在巷道地图中生成电机车的画面位置的目的是,可以便于监控人员对巷道中电机车位置的定位和追踪。
- 还没有人留言评论。精彩留言会获得点赞!